


或扫码获取更多报告

机器人构成:14个旋转执行器和14个直线执行器
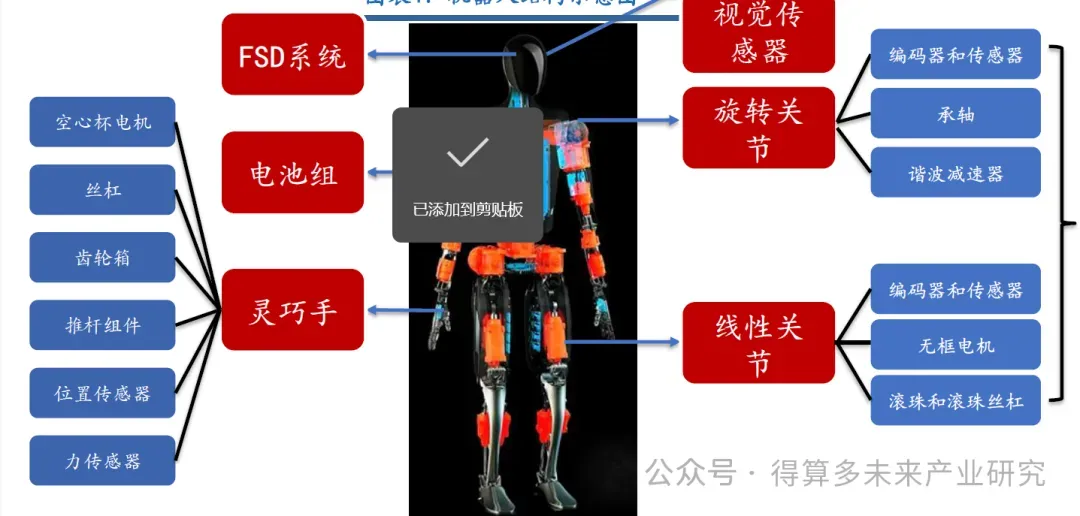
人形机器人主要零部件构成
人形机器人对工业机器人的优势:工业机器人和机械臂等更多在标准工业场景下使用,功能有限,设计人形机器人的意义在于机器人可以像人一样,在各种非结构化的场景下应用,实现多种功能的整合。
运控算法是人形机器人大规模量产的关键要素。运动控制能力是人形机器人的核心能力,在机器人执行具体任务时候,需要解决准确性和实时性问题,AI在机器人的任务和步态规划是其中最大的难点,其他的比如人形机器人行动的速度、步幅、稳定性和路径规划也都是难点。
人形机器人算法可供练习数据相对较少。人形机器人最终仍然需要往与人交互的层而上发展,要确保人形机器人在与人类做物理交互的安全不能仅依靠纯位置控制,最终能决定机器人人机交互能力的主要是A算法及软件平台能力。相对自动驾驶和ChatGPT等人工智能算法,人形机器人的算法难度在于可获取用于练习的数据较少。
技术发展遵循“工业--2B商业--2C家用”的路线。完全2C需要应用的场景太多样,算法和AI技术都难以满足要求。全通用场景的人形机器人实现难度较大,2B工业是最先应用的场景。2B场景更标准化、更简单,场景结构化程度高,尤其是工业场景,它更加标准,有利于标准数据收集及算法和产品迭代。
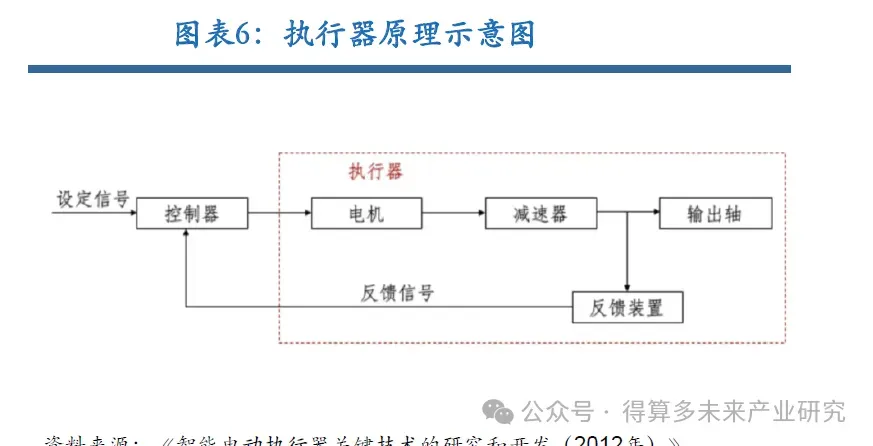
机器人核心部件:执行器
人形机器人的执行器主要负责将能量转化为机器人的机械运动。执行器按运动类型可分为旋转执行器和线性执行器。旋转执行器相对于中点(即沿圆)以角度移动,主要用于使机器人的关节进行旋转运动,而线性执行器则用于推拉动作,如手臂的伸展。执行器核心零部件包括电机、减速器、丝杠、编码器、力矩传感器等。特斯拉Oplimus线性执行器的配置为:无框力矩电机11+行星滚柱丝杠*1+力传感器州1+编码器*1+驱动器+球轴承*1+四点接触球轴承*;特斯拉Oprimus旋转执行器的配置为:无框力矩电机*1+谐波减速器*1十力矩传感器*1+编码器*2十驱动器*1十交叉滚子轴承*1十角接触球轴承*1。
机器人触觉:力矩传感器
传感器相当于机器人的触觉,力矩传感器是一种用于测量物体所受到的力矩或扭矩的传感器。力矩是绕轴旋转时的力的效果,可以是静态力矩(未产生旋转的力矩)或动态力矩(产生旋转的力矩)。力矩传感器的作用是将物体的力矩转化为电信号按照测量方向分类,可分为一到六维力传感器。六维力矩传感器是性能最优、技术壁垒最高的力矩传感器。在笛卡尔坐标系中单轴力传感器只能检测一个方向的力值,无法测量其他方向的分量;三维力传感器能够检测X、Y、Z三轴方向的垂直力,但需要保证Z轴方向与重力方向一致,否则力值测量容易引起误差。而六维力矩能够同时测量三个轴向力Fx、Fy、FZ和三个轴向力矩MxMy、Mz,能够满足任何方向上力的检测,是功能最全面的力矩传感器
六维力传感器的核心技术是弹性体的结构设计,这影响着传感器的灵敏度、动态性能、维间耦合等关键性能参数。六维力1力矩传感器的结构主要有一体化结构和SteWant并联结构两种。一体化结构的六维力传感器包括坚梁式、横梁式、复合梁式、國筒式等。
机器人关节传动:丝杠
丝杠是一种机械传动元件,由螺杆、螺母和滚珠组成,用于将旋转运动转为直线运动,可分为梯形、滚珠、滚柱丝杠等。从性能及壁垒排序,滚柱丝杠>滚珠丝杠>梯形丝杠,滚柱及梯形丝杠将受益于人形机器人爆发梯形丝杠是一种滑动运动,适用于慢速、精度要求不高等领域,主要为切削工艺,已经成熟广泛推广,价格低。滚珠丝杠和滚柱丝杠的运动原理类似,均是滚动运动,且加工设备基本相同,工艺具备同源性,但滚柱丝杠综合性能更优,具备承载力大、寿命长、体积小、速度快等优点,在高速度、高承载等极端工况下具备优势。目前滚柱丝杠市场需求远不及滚珠,成本远高于滚珠丝杠,但随着大规模量产带来的规模效应,未来滚柱丝杠成本有望显著降低。
机器人关节动力:无框力矩电机
机器人关节所采用的控制电机主要可分为伺服电机和步进电机。步进电机具备易用和成本优势,而伺服电机在精度、过载能力、频距等性能方面的优势更加明显,力矩电机与空心杯电机都属于伺服电机,更适合应用在机器人关节与灵巧手。步进电机通过控制脉冲个数来控制转动角度,从而准确定位;伺服电机通过控制脉冲时间的长短控制转动角度。
伺服电机下子类较多,最常见按电流类型来分为直流伺服电机和交流伺服电机。
人形机器人关节要求快速响应、高功率密度、高效率、高灵活度,因此直流无刷电机特点最为符合。
力矩电机全称为永磁无刷直流力矩电机,无框力矩电机省去了电机的外壳,仅保留了传统电机中转子和定子两个部分,更直接集成到人形机器人关节中,与其他部分(如轴承和外壳)紧密结合。
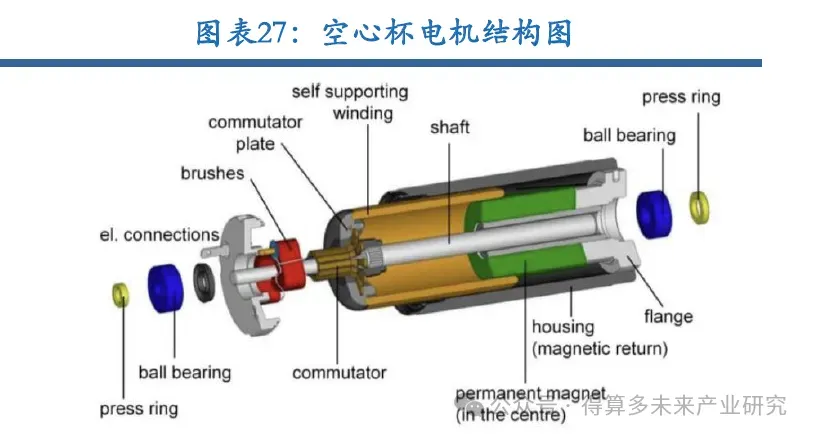
灵巧手的重要部件:空心杯电机
在灵巧手使用的空心杯电机一般指的是空心杯电机+多级行星减速箱组成的模组。空心杯电机是一种特殊的直流电机,在结构上突破了传统直流电机的结构形式,采用的是无铁芯转子,其电枢绕组为空心杯线圈,形似水杯,因此被称为“空心杯电机”
空心杯电机具有高速低扭短的特性,为了在较小空间内获得较大的手指抓握力,需要搭配行星减速箱使用,一般会集成2-3级的行星减速箱。空心杯关节是直流永磁伺服微特电机的一类,从原理上来说属于旋转关节的范畴,具有新颖的转子结构、独特的线圈制造工艺和较小的尺寸
机器人转动关节核心部件:精密减速器
精密减速器是机器人转动关节的核心零部件。精密减速器具备体积小、重量轻、精度高、稳定性强等特点,能够对机械传动实现精准控制,主要可以分为谐波减速器、RV减速器、精密行星减速器。谐波减速器具有体积小、质量小、传动精度高、运转平稳等优点,因此主要应用于机器人小臂、腕部、手部等部件;RV减速器的优点包括传动比范围大、传动效率高、刚性和耐过载冲击性能好等,主要应用于机器人的机座、大臂、肩部等大关节;精密行星减速器具有大扭矩高刚性、高单级传动效率、寿命长等优点,主要与伺服电机、控制器共同组成机器人的驱动装置