


或扫码获取更多报告

一、执行器概念及分类1、执行器:人形机器人硬件系统关键部件
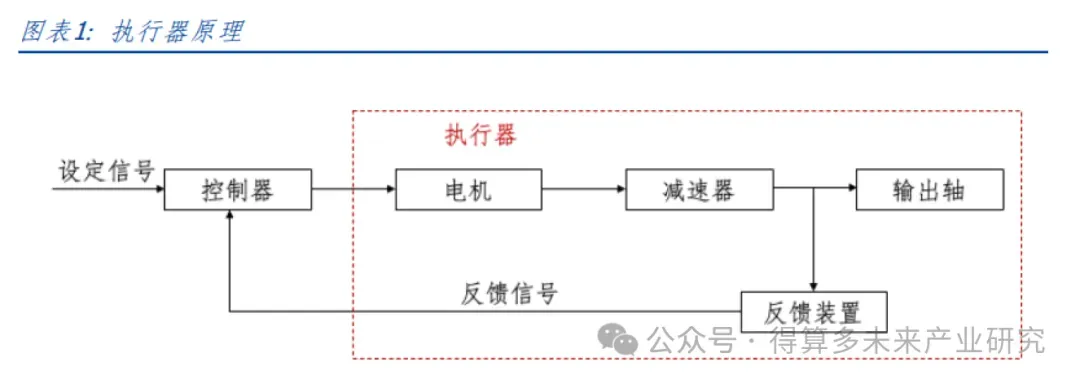
关节执行器(Actuators,简称为执行器)即机器人一体化关节,是影响机器人硬件成本和运动性能的关键部分。关节执行器是驱动机器人执行机构(手臂、腿部等)运动的组件,安装在机器人关节处(连杆机构的连接处),通过将电机的旋转运动转化为驱动连杆机构运动,又被称为(关节)驱动器、(关节)致动器、关节模组。执行器有多种零部件组成,主要包括电机(驱动装置)、减速器(传动装置)编码器(传感装置)、控制板和控制软件(控制装置)等。
2、执行器具体分类
(1)按运动类型
按照运动类型,执行器可分为旋转执行器(Rotary Actuator)、线性执行器(LinearActuator)两者区别在于,线性(直线)执行器最终让物体沿直线移动,而旋转执行器则是让物体按一定角度转动,即线性执行器执行往复直线运动,旋转执行器执行旋转运动。执行器中,不同类型的电机可以提供旋转运动(旋转电机)、也可以提供直线运动(直线电机),而不同传动装置也可以将电机的运动进行传递和转化,例如减速器可以将旋转电机的旋转运动以降低速度、提高转矩的方式传递出去,而皮带和滑轮、齿轮箱以及丝杠等减速装置可将电机的旋转运动转换成线性运动。一般来说,旋转执行器主要分布于肩髋等需要大角度旋转的关节,线性执行器分布于膝肘等摆动角度不大的单自由度关节、腕踝两个双自由度但是体积紧凑的关节。
(2)根据动力来源的不同
根据动力来源的不同,执行器可分为液压、气动、电机等。电机驱动方式具有成本低、控制精度高、密闭性好等特点。
1)气压驱动
常见于点到点的控制。随着气动肌肉和气压伺服技术的发展,气压驱动逐渐被应用到人形机器人中。但是空气的可压缩性和延迟特性使得气压驱动方式难以实现精准控制,此外还具有能量效率低、气压出力小等缺点,故目前使用较少。
2)液压驱动不需要采用减速装置,驱动结构简单;同时还具备输出力大、功率重量比高的优点,故被用作早期阶段人形机器人的主要动力来源。美国波士顿动力公司发布的Petman和Atlas均采用液压驱动方式。但是液压驱动精度较低,制造和维修成本高,目前无法满足大规模商业化的需要,故逐步被电机驱动方式所替代。
3)电机驱动
具有控制精度高、成本低等优势,是服务机器人、人形机器人首选动力方式。但是电机驱动的功率密度不如液压驱动,在应用中往往需要搭配减速装置,增大了回程间隙等误差;同时也较难适应大负载、野外等场景。未来的发展方向主要是提高驱动系统的负载能力和柔性,使其能够适应多元应用场景需求。
(3)按驱动方式
刚性执行器是主流方案,准直驱执行器前景广阔。人形机器人电动执行器的研究和应用始于20世纪70年代,技术迭代主要围绕结构设计、减速器、控制方式等方面。结构设计上,执行器结构设计经历了从独立设计到和整机融合的发展,技术层面经历了从刚性到弹性,再到准直驱的发展,集成度逐步提升。减速器上,执行器用减速器经历了从大传动比到小传动比的演变,制造难度逐步降低。控制方式上,执行器控制方式经历了从位置控制到力位混合控制和阻抗控制的演变,控制精度逐步提升、能量损耗逐步降低。
刚性执行器(Traditional Stiffness Actuator):1983年早稻田大学研究的WL-1oR机器人使用刚性执行器TSA,自此人形机器人开始广泛应用刚性执行器为关节动力源。该方案控制精度高、技术成熟,目前也是人形机器人执行器的主流方案。
弹性执行器(Series Elastic Actuator):1995年麻省理工学院的 Pratt等人提出了弹性执行器SEA的概念,拉开了弹性驱动器研究的序幕。美国宇航局的机器人Valkyrie和意大利技术研究院的机器人
Walk-Man都使用了弹性驱动器。
准直驱执行器(Proprioceptive Actuator):2016年 Wensing 等提出了准直驱执行器 PA的概念,并将其应用于四足机器人Cheetah和双足机器人Hermes,准直驱执行器是最近几年研究的热点。
二、关键技术参数
1、各厂商对于执行器设计与配置选择不同
机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况。包括但不限于自由度、额定负载、工作空间、工作精度等,以下是一些主要技术参数的详细解释:
(1)自由度
指的是机器人能够独立控制的运动方向的数量,是根据其用途设计的。人形机器人通常模仿人类的动作,自由度越多,机器人就越能接近人手的动作机能,通用性越好,可用直线移动、摆动或者旋转动作的数目来表示。自由度越多,结构越复杂,对机器人的整体要求越高。
(2)额定负载
也称有效负荷,指机器人在正常操作条件下能够持续承载的最大重量。这通常影响机器人的搬运和操作能力。当负载较大时,提高电机的功率不划算,可以在适宜的速度范围内,通过减速器来提高输出扭矩。
(3)工作空间
又称工作范围、工作行程,描述机器人能够到达的所有位置的区域。工作空间的大小和形状取决于机器人的设计和关节的自由度,反映了机器人工作能力的大小,它不仅与机器人各连杆的尺寸有关,还与机器人的总体结构有关。
(4)工作精度
指机器人执行任务时能达到的位置精度和重复性。重复定位精度取决于机器人关节减速机及传动装置的精度,绝对精度取决于机器人控制算法、编码器精度、减速及传动装置精度等的综合表现。高精度的机器人适合执行需要精细操作的任务。
其他参数还有工作速度、控制方式、驱动方式、安装方式、动力源容量、本体质量、环境参数等,这些参数决定了机器人能够在何种环境下工作。这些技术参数共同定义了人形机器人的性能特征,决定了它们在特定应用场景中的适用性和效率。设计和选择人形机器人时,需要根据任务需求和工作环境来考虑这些参数,以确保机器人能够满足预期的工作要求。同时,在执行器的设计选择上,不同厂商上也会有不同的侧重点,需根据机器人的设计目标和应用场景,选择不同的零部件和配置方案。
以减速器和丝杠为例:1)为了提高扭矩输出,执行器通常会搭配减速器使用。常见的减速器有谐波减速器、行星减速器、RV减速器等。目前特斯拉Optimus搭载了谐波减速器。而其他厂商可能会根据不同的扭矩和空间要求选择行星减速器或其他类型减速器。2)在直线驱动器中,丝杠是将旋转运动转换为直线运动的关键部件。梯型丝杠、滚珠丝杠和滚柱丝杠是较为常见的选择,厂商可能根据不同部位对承载力、精度等要求不同而选择不同类型的丝杠。
2、特斯拉人形机器人执行器技术框架
以特斯拉 Optimus机器人设计方案为例来分析执行器技术框架。Optimus Gen1执行器布置方案为14个直线执行器和14个旋转执行器,Optimus Gen2在颈部增加了2个旋转执行器,其余部位预计未做调整。30个自由度分布在颈部(2个旋转)、肩部(3个旋转)x2、大臂(1个直线)x2、小臂(2个直线+1个旋转)x2、腰部(2个旋转)、髋部(2个旋转)x2、大腿(2个直线)x2和小腿(2个直线)X2