


点击蓝字
关注我们
全文约7000字,建议收藏后阅读
INTRODUCTION
导读
随着人形机器人加速落地,核心零部件的竞争愈发白热化。在人形机器人的“关节”处,精密减速器扮演着关键角色——它不仅决定了机器人动作的灵活性、精准度与可靠性,更在整机成本中占据举足轻重的地位,成为制约行业发展的核心瓶颈之一。
与传统工业领域使用的通用减速器不同,人形机器人对减速器的要求堪称“极致苛刻”。传统工业减速器多用于固定设备的动力传递,侧重承载能力与耐用性,对精度、体积和重量的要求相对宽松;而人形机器人需要模拟人类的各类复杂动作,关节需实现高速响应、微秒级定位,且要适配狭小的安装空间,这就要求减速器必须具备高精度、小体积、轻重量、长寿命的核心特质。从价值占比来看,普通工业设备中减速器成本占比仅5%-10%,而在人形机器人中,这一比例可高达30%,越精密的机器人需要的减速器越多,单机需装配20至40个不同类型的减速器,其重要性不言而喻。
01
什么是减速器

非从本质上讲,减速器是连接动力源(如伺服电机)和执行结构(如机器人关节)的中间传动机构,核心功能是“减速增扭、精准传力”,相当于机器人关节的“动力转换器”。简单来说,伺服电机的输出特点是“高速低扭矩”,每分钟转速可达数千转,但扭矩较小,无法直接驱动机器人关节完成缓慢、有力的动作;而减速器通过内部齿轮、蜗杆等结构的啮合传动,将电机的高速低扭矩输出,转化为执行结构所需的低速高扭矩输出,放大数十倍甚至上百倍的扭矩,实现机器人关节的平稳转动。
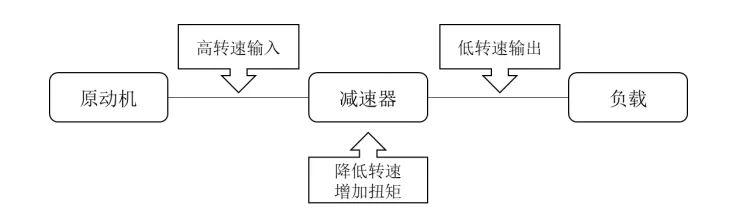
点击查看大图:减速器工作原理,图片来自科峰智能招股书
对于人形机器人而言,减速器的作用远不止“减速增扭”。它还需要保证极高的传动精度,确保机器人关节的重复定位精度在±0.005毫米以内,避免出现动作偏差;同时需具备低噪音、长寿命的特质,满足人形机器人长期连续运行的需求——行业标准要求,机器人精密减速器的使用寿命需超过1万小时,才能适配工业场景、家庭场景的长期使用需求。
按照精度和用途划分,减速器可分为通用减速器、专用减速器和精密减速器三类。其中,通用减速器用于普通工业设备,精度较低;专用减速器多为非标产品,适配船舶、冶金等特定行业;而精密减速器因回程间隙小、传动精度高,专门用于机器人、数控机床等高端领域,也是人形机器人的核心适配类型。
而在人形机器人所采用的精密减速器也可以分为三类——谐波减速器、行星减速器、RV减速器,三者因结构、性能差异,分别适配机器人不同部位的关节,形成“各司其职、协同配合”的格局。其中,谐波减速器和RV减速器占据核心地位,行星减速器则主要用于精细化动作关节,三者合计占据人形机器人减速器市场的95%以上份额。
结合三种精密减速器的性能差异,人形机器人各部位关节因负载、灵活度需求不同,所选用的减速器类型也各有侧重,可按部位简单列示如下表(实际按不同型号机器人产品特性可能有变化):
部位 | 减速器 | 特点 |
头、颈、肩、肘、腕等 | 谐波减速器 | 负载小、对转动精度和静音性要求高 |
灵巧手 | 谐波减速器、微型行星减速器 | 负载小、精度要求极高、空间极致狭小 |
腰部 | 行星减速器、RV减速器 | 负载适中,对传动效率和稳定性要求较高,行星减速器为主,部分重负载机型搭配RV减速器辅助 |
基座、髋部、大腿、膝盖等 | RV减速器 | 负载高、稳定性要求高 |
小腿、脚踝等 | 行星减速器、谐波减速器 | 负载适中,需兼顾灵活性和稳定性,少部分机型也可能搭配谐波减速器辅助微调 |
02
谐波减速器简介
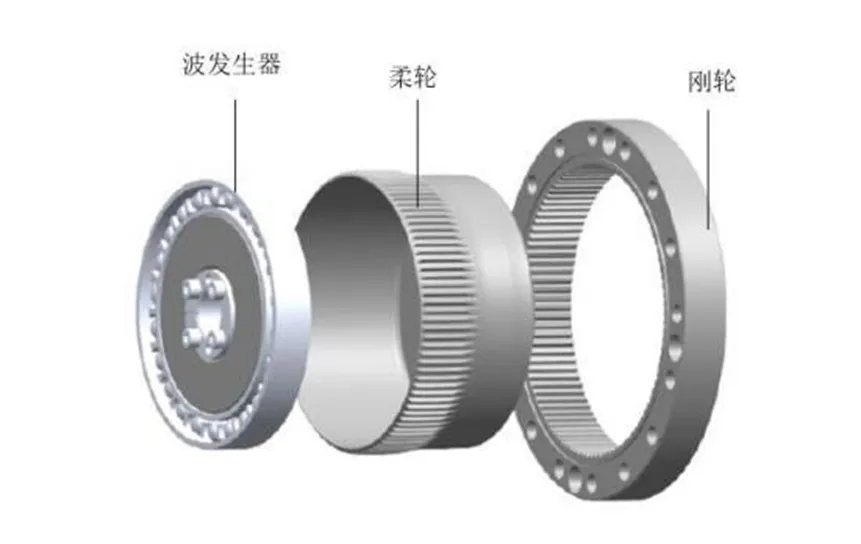
点击查看大图:谐波减速器结构图,图片来自绿的谐波招股书
谐波减速器是人形机器人中使用最广泛的精密减速器之一,核心由波发生器、柔性齿轮(柔轮)和刚性齿轮(刚轮)三个部件组成,工作原理是通过波发生器使柔轮产生可控弹性变形,让柔轮外齿与刚轮内齿依次啮合,实现动力传递与减速。
点击查看大图:谐波减速器示意图,粉色为柔轮,蓝色为刚轮,图中省略了波发生器
其最大优势是精度极高、体积小巧、重量轻便,传动效率可达98%,回程间隙可控制在0.5-1.5弧分,甚至部分产品可达30弧秒以下,相当于头发丝直径的1/200误差,非常适合对精度和体积要求极高的关节。
在人形机器人中,谐波减速器主要用于肩部、肘部、手腕、手指等灵活度要求高、负载较小的关节。例如,特斯拉Optimus的手腕与手指关节,就大量采用谐波减速器,实现手指的精细化抓取动作;优必选Walker X的肘部关节,也通过谐波减速器实现灵活弯曲,模拟人类手臂的动作姿态。
其短板是承载能力相对较弱,柔轮在高速运转中反复弹性变形,极易疲劳断裂,使用寿命相对较短,无法适配重负载关节。
03
行星减速器简介
行星减速器由太阳轮、行星轮以及其他支撑结构组成,其名称来自“行星绕日”模型,工作原理是通过太阳轮驱动行星轮自转,同时行星轮围绕太阳轮公转,带动输出轴转动实现减速。其核心优势是结构紧凑、传动效率高(单级传动效率可达97%-98%)、成本较低,且耐冲击性能好,能够在高速运转中保持稳定。
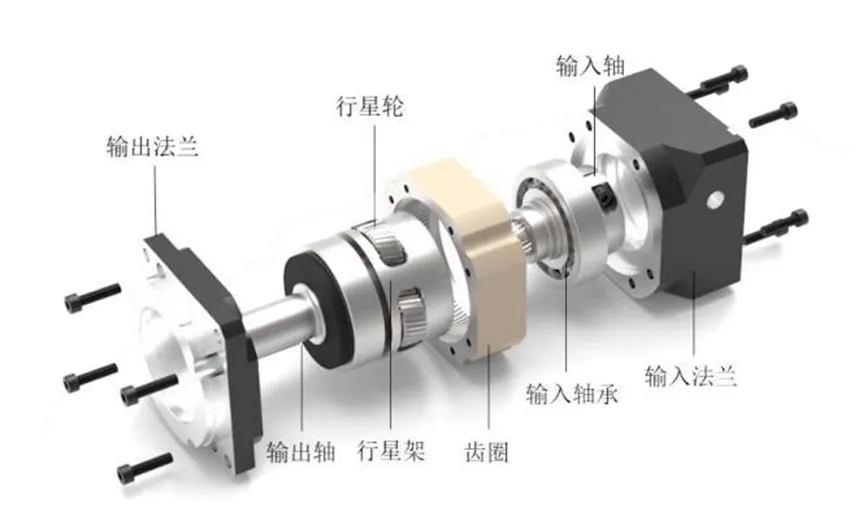
点击查看大图:行星减速器产品图,图片来自科峰智能招股书
在实际应用中,为了受力平衡、传动平衡,如下图所示,往往会使用一个太阳轮+三个行星轮的模式。
点击查看大图:行星轮齿轮部分的切面图,其中有1个太阳轮(黄色)、3个行星轮(红色)
在人形机器人中,行星减速器主要用于对精度要求中等、负载适中的关节,或作为辅助传动部件,例如机器人的腰部关节、脚踝关节,以及手指关节的辅助传动。近年来,随着微型行星减速器技术的突破,其应用场景不断拓展——兆威机电推出的直径仅6mm的微型行星减速器,背隙精度≤1弧秒,已用于特斯拉手指关节模组,实现精细化抓取动作。其短板是单级传动比相对较低(3-10左右),多级结构会导致体积增大,且精度略逊于谐波减速器和RV减速器。
04
RV减速器简介
RV减速器(旋转矢量减速器)的工作原理比前两种减速器复杂很多,可以通俗理解为“两步减速、平稳传力”,它在传统摆线针轮减速器基础上优化而来,核心靠“行星齿轮+摆线针轮”的两级配合,一步步把电机的高速转动变成关节需要的低速大力量,每个关键部件都有明确分工,具体工作过程可以拆成3步讲清楚。这一部分文字和图片比较多,请耐心阅读。
第一步,动力输入与初步减速。RV减速器的输入轴会直接连接伺服电机,电机带动输入轴高速转动后,输入轴上的行星齿轮会跟着转动——这就是它的第一级减速(行星齿轮减速)。在之前的行星减速器部分已经介绍过,行星齿轮就像围绕太阳转的行星,一边自己转动,一边围绕输入轴的中心公转,通过这种“公转+自转”的配合,先把电机的高速转速降下来一部分,同时初步放大扭矩,为后续的二次减速做好准备。同样,为了保证传动平稳,行星轴以及后面的曲柄轴,也一般设计成三组。
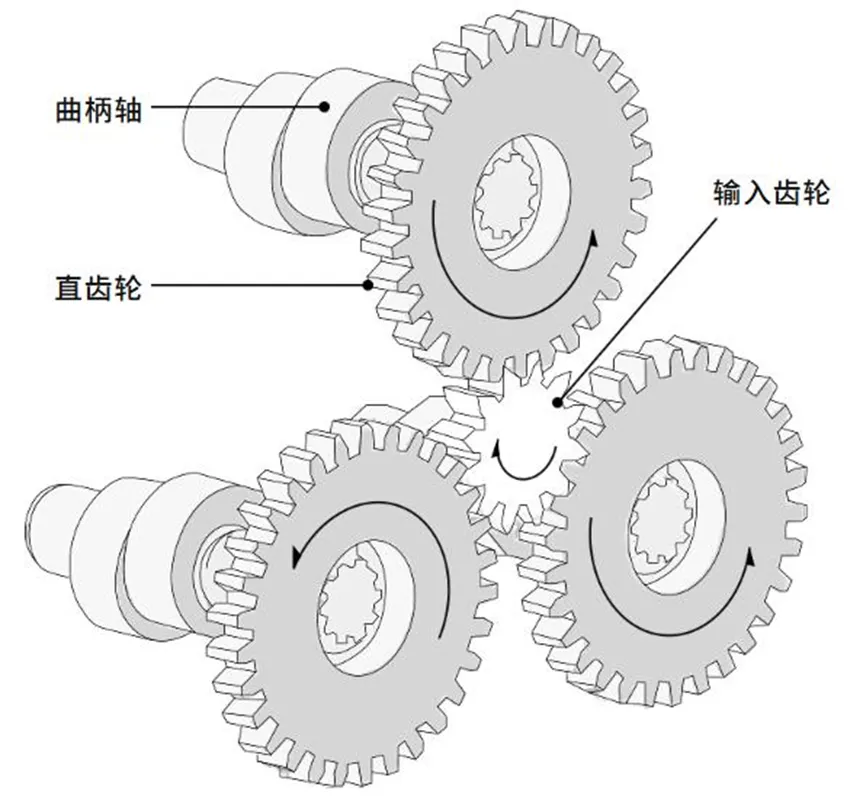
RV减速器图一:行星齿轮减速部分,图片来自纳博特斯克官网
第二步,曲柄轴带动RV齿轮做“偏心运动”。经过第一级减速后的动力,会传递到RV减速器的核心部件——曲柄轴,曲柄轴通过偏心部直连直齿轮,偏心部的中心和直齿轮的中心不在同一点。这里特别设计了两个偏心部,并且都通过滚针轴承安装了2个RV齿轮(也称摆线轮),这样做的目的很简单:2个RV齿轮可取得力的平衡,让整个结构运转更平稳,避免出现抖动影响精度。当曲柄轴转动时,会带动套在上面的RV齿轮一起运动,因为曲柄轴的“偏心”设计,RV齿轮不会做匀速圆周运动,而是会呈现出“一边靠近针齿槽、一边远离”的偏心摆动(看起来就是轻微摆动的样子)。
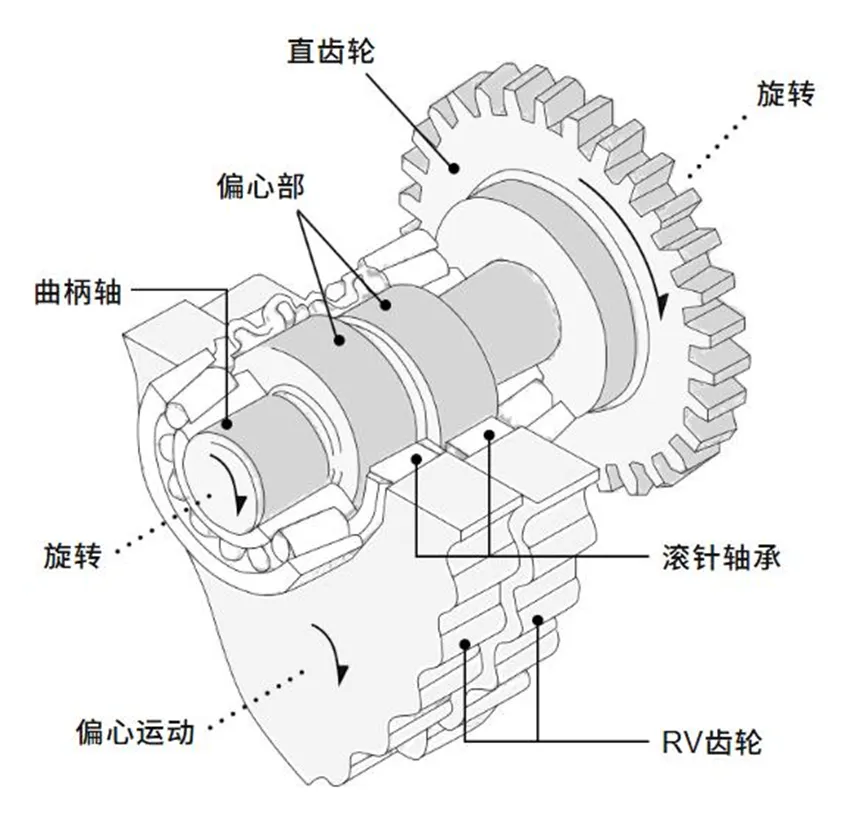
RV减速器图二:曲柄轴部分的偏心设计,图片来自纳博特斯克官网
第三步,RV齿轮与针齿槽啮合,完成最终减速并传力。RV齿轮的外圈有特殊的齿形(也就是短幅外摆线齿廓,通俗说就是“适配针齿的特殊牙齿形状”),而它外围的壳体上,均匀分布着很多固定的针齿槽(类似一个个小圆柱)。当RV齿轮做偏心摆动时,它的齿会和外壳上的针齿槽依次啮合——因为齿形设计特殊,曲柄轴旋转一次,RV齿轮与针齿槽接触的同时作一次偏心运动(曲柄轴运动)。在此结果上,RV齿轮沿着与曲柄轴的旋转方向相反的方向旋转一个齿轮距离(这就是第二级减速,也是RV减速器的核心减速环节)。这种特殊齿形还有一个好处,就是啮合时会有多个齿同时咬合(啮合重叠系数高),就像很多只手一起发力,既能大幅增强承载能力,还能让动力传递更平稳,不容易出现齿部磨损或断裂。最后,经过两级减速放大后的动力,会通过输出机构传递出去,驱动人形机器人的重负载关节平稳转动。
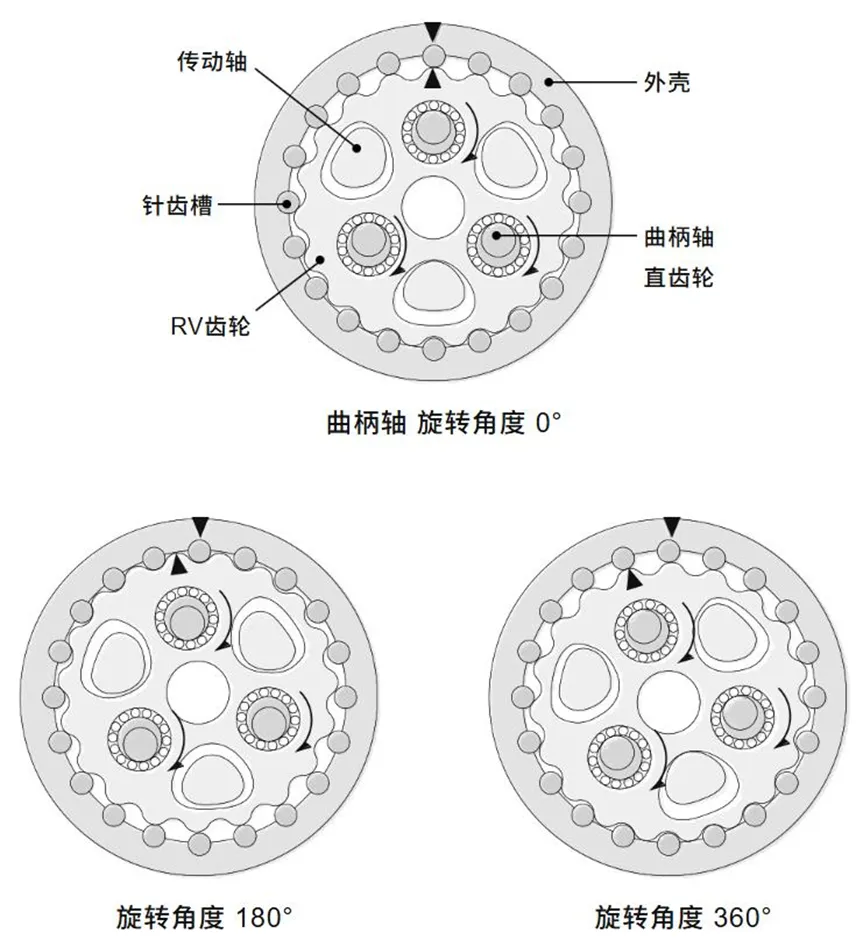
RV减速器图三:注意图中的黑色小箭头,曲柄轴旋转360度,RV齿轮旋转一个齿轮的距离,图片来自纳博特斯克官网
再通过动画直观感受一下RV减速器“偏心运动”的过程。
RV减速器工作原理,蓝色部分为RV齿轮,也称摆线轮。动图截取自纳博特斯克官网视频
RV减速器的核心优势是承载能力强、刚性好、耐过载冲击,能够承受较大的扭矩和冲击载荷,传动效率可达90%-95%,使用寿命可达20000-25000小时,是谐波减速器的2-3倍。同时,其精度也能达到较高水平,通过动态负载齿形修正技术,可将回差压缩至15弧秒以内,接近谐波减速器的精度水平,回程间隙可控制在1弧分以内,高端产品甚至可达0.5弧分以下。
由于其强承载、高刚性的特点,RV减速器主要用于人形机器人的基座、大腿、髋部等重负载关节——这些关节需要承受机器人自身重量和外部载荷,对刚性和承载能力的要求极高。例如,人形机器人的髋部关节,需要带动整条腿部运动,负载较大,必须采用RV减速器才能保证动作的稳定性;基座关节则需要承载整机重量,也是RV减速器的核心应用场景。其短板是体积和重量较大,结构复杂,制造成本相对较高,同等扭矩下体积虽小于传统圆柱齿轮减速器,但仍大于谐波减速器和行星减速器。
05
精密减速器研发难点
尽管我国已成为全球最大的工业机器人市场,但精密减速器领域长期被海外企业垄断,核心原因在于其研发难度极高,涉及机械设计、材料科学、精密加工、装配工艺等多个领域的核心技术,形成了四大难以突破的技术壁垒,成为国产企业突围的“拦路虎”。
精密加工壁垒
精密减速器的核心零部件(如齿轮、摆线轮、柔轮),对加工精度的要求达到亚微米级(1微米=1000纳米),相当于头发丝直径的1/100,这就对加工设备、加工工艺提出了极致要求。例如,RV减速器的摆线轮齿廓需要采用数控磨削和电火花加工,精度需达到微米级;谐波减速器的柔轮作为薄壁杯状金属件,加工过程中需严格控制壁厚均匀性,误差不能超过0.001毫米,否则会导致柔轮弹性变形不均,影响传动精度和寿命。
目前,全球高端精密加工设备主要被德国、日本企业垄断,国产加工设备的精度和稳定性仍有差距;同时,精密加工工艺需要长期的技术积累,涉及刀具选择、切削参数、热处理工艺等多个细节,国产企业短期内难以实现突破。
材料工艺壁垒
减速器的核心零部件需要同时具备高强度、高韧性、高耐磨性的特质,例如谐波减速器的柔轮,需要在反复弹性变形中不疲劳、不断裂,这就对材料的选择和热处理工艺提出了极高要求。日本企业通过长期研发,掌握了专用的特种合金材料配方,再配合先进的热处理工艺,能够大幅提升零部件的使用寿命——日本哈默纳科的柔轮寿命可达1.2万小时,而国产柔轮的寿命此前仅能达到5000小时左右。
国产企业的短板是,缺乏专用合金材料的核心配方,多采用通用钢材替代,导致零部件性能不足;同时,热处理工艺(如液氮深冷处理)不够成熟,无法有效抑制材料晶格畸变,影响零部件的稳定性和寿命。
装配工艺壁垒
精密减速器的内部结构复杂,零部件数量多、体积小,装配过程需要在毫米级空间内完成精细化操作,装配精度直接决定了减速器的传动精度和稳定性。例如,RV减速器的装配间隙控制需要比头发丝还细,一旦装配偏差超过0.001毫米,就会导致回程间隙增大,影响定位精度;谐波减速器的波发生器与柔轮的装配,需要严格控制配合公差,否则会导致柔轮磨损加快。
目前,全球高端精密减速器的装配主要依赖人工精细化操作,需要经验丰富的技工,而国产企业缺乏专业的装配人才和成熟的装配工艺,导致产品一致性差——同一批次的减速器,精度差异较大,难以满足人形机器人的规模化应用需求。
专利封锁壁垒
长期以来,日本、德国企业通过持续研发,在精密减速器领域布局了大量核心专利,形成了严密的专利壁垒,从基础齿形设计到热处理工艺层层设防,限制国产企业的研发和生产。例如,日本哈默纳科垄断了谐波减速器的IH齿形专利,纳博特斯克垄断了RV减速器的核心结构专利,国产企业如果直接模仿,会面临专利侵权风险;而自主研发新结构、新齿形,需要投入大量的研发资金和时间,难度极大。
06
国内外市场结构
当前,全球人形机器人精密减速器市场呈现“海外垄断、国产突围”的格局——日本企业占据绝对主导地位,掌控全球80%以上的市场份额;国产企业通过持续研发,逐步突破核心技术,市场份额稳步提升,尤其是在谐波减速器领域,已实现部分进口替代,进入全球头部供应链。
海外头部企业
海外精密减速器企业主要集中在日本和德国,其中日本企业凭借技术积累和产业链优势,占据绝对主导地位,核心企业有3家,分别垄断谐波减速器和RV减速器市场。
1. 哈默纳科(Harmonic Drive,日本):全球谐波减速器的绝对龙头,成立于1970年,掌握谐波减速器的核心专利和技术,全球市场份额高达70%以上。其产品精度高、寿命长,是特斯拉、优必选等全球头部人形机器人企业的核心供应商。同时,公司还布局了精密行星减速器,产品覆盖人形机器人、工业机器人等多个领域。
2. 纳博特斯克(Nabtesco,日本):全球RV减速器的龙头企业(本文很多相关图片来自其官网),成立于2003年,由日本两家老牌机械企业合并组建,掌握RV减速器的核心结构专利,全球市场份额高达65%以上。其RV减速器承载能力强、刚性好,主要用于人形机器人的重负载关节,是丰田、本田等日本机器人企业的独家供应商,同时也为特斯拉Optimus提供RV减速器。
3. 住友重工(Sumitomo Heavy Industries,日本):全球精密行星减速器的龙头企业,同时布局RV减速器和谐波减速器,产品侧重高刚性、高耐用性,全球市场份额约5%。其行星减速器产品精度高、传动效率高,适配人形机器人的精细化关节,主要为工业机器人企业提供配套,近年来也逐步切入人形机器人赛道。
此外,德国的SEW、力士乐(Rexroth)等企业,也在精密减速器领域拥有一定的技术积累,主要侧重工业机器人配套,在人形机器人领域的布局相对较晚,市场份额较低。
国内头部企业
近年来,随着国家政策支持和企业研发投入的增加,国产精密减速器企业逐步突破海外技术封锁,在谐波减速器领域实现了较大突破,RV减速器和行星减速器也逐步实现量产,形成了六大主力阵营,市场份额稳步提升。
1. 绿的谐波(中国,688017.SH):国内谐波减速器的龙头企业,成立于2011年,是国内首家实现谐波减速器工业化生产和规模化应用的企业,打破了海外垄断。公司自主研发“P型齿”结构,突破海外专利封锁,同时开发出液氮深冷处理工艺,将柔轮寿命提升至1.2万小时,接近国际水平,产品价格仅为日企的1/2至1/3。2025年,绿的谐波向特斯拉交付1万套谐波减速器,用于Optimus手腕与手指关节,成为首个进入该供应链的中国谐波厂商,全球市场份额超35%。
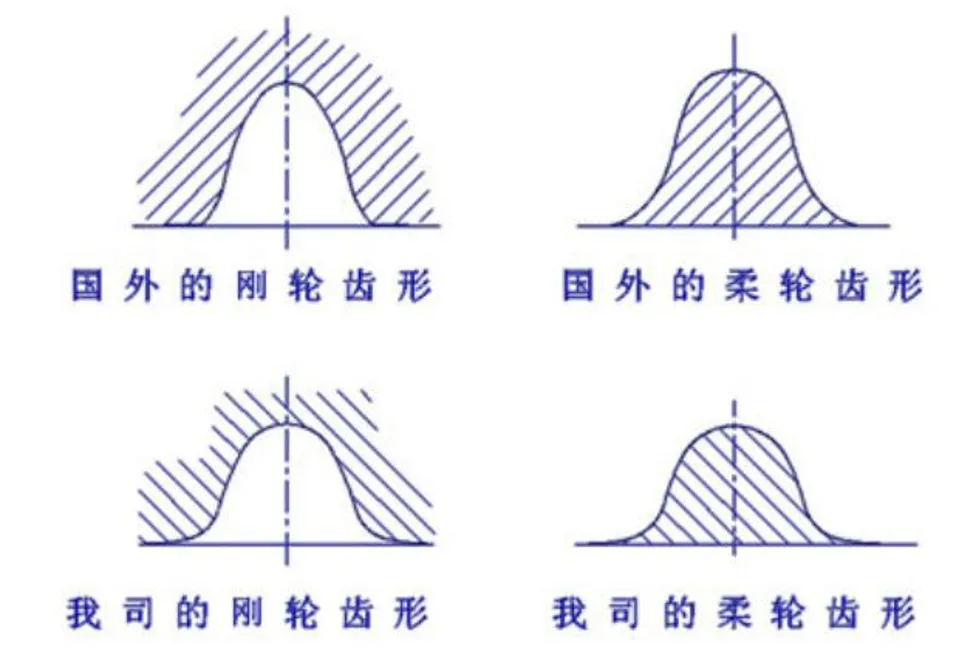
点击查看大图:绿的谐波“P型齿”与日本哈默纳科“IH型齿”对比,图片来自绿的谐波官网,西南证券整理
2. 双环传动(中国,002472.SZ):国内RV减速器的龙头企业,也是唯一实现谐波+RV双线量产的企业。公司通过动态负载齿形修正技术,将RV减速器回差压缩至15弧秒以内,并通过200万次屈伸循环测试,成功拿下特斯拉髋、膝关节订单,RV减速器国内市场份额超30%,同时为国内多家人形机器人企业提供配套。
3. 中大力德(中国,002896.SZ):国内精密减速器的综合性企业,产品覆盖谐波、RV、行星三类减速器,行星减速器扭矩密度超国际竞品10%,获智元机器人5万台订单。公司产品侧重中高端市场,适配人形机器人的多个关节,性价比优势明显,国内市场份额约8%。
4. 兆威机电(中国,003021.SZ):国内微型行星减速器领导者,聚焦人形机器人“灵巧手”场景,推出直径仅6mm的微型减速器,背隙精度≤1弧秒,寿命超2万小时,已用于特斯拉手指关节模组。公司的核心优势是微型化、精细化,一体化电机模组成其差异化利器。
此外,昊志机电、豪能股份、江苏雷利等国内企业,也在精密减速器领域逐步突破——昊志机电独创SP齿形,振动与噪音显著低于行业;豪能股份在轻量化RV减速器领域实现突破,减重30%,获智元1.2亿元联合开发订单;江苏雷利将行星减速器做到10mm直径,为国内最小量产型号。
07
结语
作为人形机器人的核心零部件,精密减速器的技术水平直接决定了人形机器人的性能和商业化进程。当前,全球人形机器人产业正处于爆发前夕,精密减速器市场需求迎来快速增长,机构预测,到2030年,谐波减速器国产份额将从30%提升至60%,RV从15%升至40%,行星减速器更将达80%以上。
尽管海外企业仍占据高端市场主导地位,但国产企业通过持续研发,已在核心技术上实现突破,逐步打破海外垄断,尤其是在谐波减速器领域,已实现进口替代,并进入全球头部供应链。未来,随着国产企业在精密加工、材料工艺、装配工艺等领域的持续突破,叠加政策支持和资本赋能,国产精密减速器的市场份额将进一步提升,有望实现从“进口替代”到“全球引领”的跨越。
一枚小小的减速器,转动的不仅是人形机器人的关节,更是中国制造从追随到主导的历史进程。未来,随着人形机器人的规模化量产,精密减速器赛道将迎来更大的发展机遇,而那些掌握核心技术、具备性价比优势的国产企业,终将在全球竞争中脱颖而出。
【风险提示】文中数据均来自互联网公开信息,文章信息和意见不构成投资建议。本文使用 AI 算法辅助优化,仅作参考。