



一、工业具身智能发展现状
(一)具身智能、工业具身智能与工业机器人
具身智能是将人工智能融入机器人等物理实体,赋予它们感知、 学习和与环境动态交互的能力。具身智能通过赋予机器“大脑”,使 其具备感知、决策与执行的全栈能力,未来将在工业、医疗、服务等 领域广泛应用。
工业具身智能是指具身智能技术在工业领域的深度应用,其核心 在于将人工智能与工业机器人深度融合,通过物理实体与制造环境的 实时交互,实现感知、决策与执行闭环,从而提升工业生产的智能化 水平。
工业具身智能是具身智能在工业领域的“特化版本”,既承接其 核心框架,又针对工业需求进行了优化和重构。工业具身智能和具身 智能的区别与联系主要表现为:
a)具身智能广泛应用于家庭、驾驶、医疗等领域,而工业具身 智能主要应用于制造、物流等工业场景;
b)具身智能的应用环境体现为开放、动态,而工业具身智能的 应用环境主要表现为半结构化和高标准化;
c)具身智能的应用核心需求为交互的自然性,而工业具身智能 的应用核心需求为可靠性和安全性。
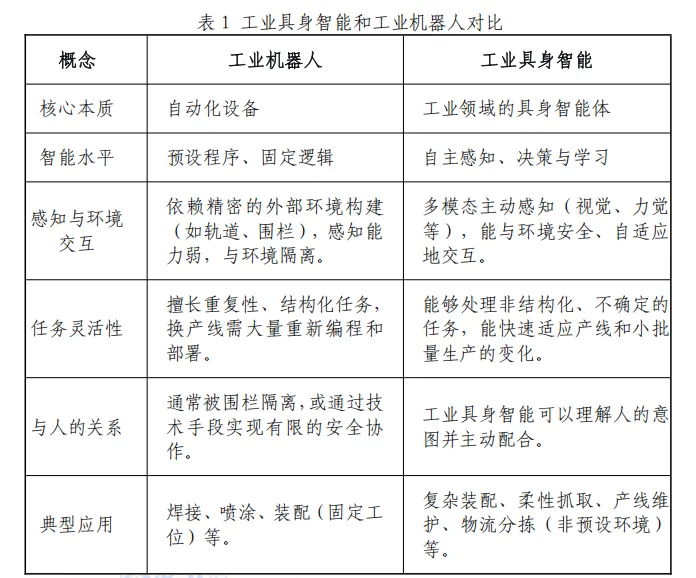
工业机器人是一种在工业自动化中使用的、自动控制、可重复编 程、多用途的操作机,可对三个或更多轴进行编程,其可以是固定式或移动式,用于工业自动化应用中。相比于工业机器人,工业具身智能额外增加了人工智能属性。工业具身智能和工业机器人的区别与联系对比如下表所示。
(二)工业具身智能核心技术特征
工业具身智能的本质是“具身认知+自主控制+安全执行”的统一 体,是实现智能制造高级阶段(如智能产线、工业大脑、人机协同系 统等)的技术基础。工业具身智能主要具备以下关键技术特征:
a)在多模态感知方面,工业具身智能通过融合视觉、听觉、力 觉、温度、振动等多种感知模态,实现对复杂工业环境的高精度、高 鲁棒性感知。传感器与边缘智能芯片的深度耦合,使智能体具备实时状态监测与环境建模能力。
b)在认知与决策协同方面,在认知层面,具身智能引入大模型、 知识图谱与元学习等技术,使其具有情境理解、自我适应和经验迁移 能力。决策层强调强化学习、多目标优化与博弈推理等方法,用于实 现复杂任务的动态规划与最优策略制定。
c)在执行与控制自适应方面,依托柔性机器人、智能执行器与 精密控制算法,工业具身智能能够在高动态、强扰动的物理环境中, 实现安全、高效的操作行为。控制系统广泛引入模型预测控制(MPC)、 学习控制(LBC)与自适应鲁棒控制,支撑执行层的动态调整能力。
d)在系统级实时性与闭环自治方面,具身智能强调感知-认知- 决策-执行的高频闭环协同,依托边云协同计算架构,实现毫秒级的 响应与策略刷新,满足高时效、高精度的工业运行需求。
(三)工业具身智能应用发展趋势
当前,工业具身智能正逐步从试验性部署向规模化应用过渡,其 发展趋势主要体现在以下几个方面:
a)从固定场景向多场景泛化迁移:初期工业具身系统主要应用 于结构化作业场景,如流水线质检、协作装配等,现已逐步向非结构 环境(如仓储物流、柔性制造)扩展,强调系统对环境变化的泛化与 适应能力。
b)从单体智能向群体协同演进:具身智能单体设备正发展为多 智能体系统(MAS),通过边缘协同控制与任务分配机制,实现工业机器人群体间的自组织、自协调与自优化。
c)从辅助操作向自主决策演进:越来越多的工业具身系统已从 “人指导+机器执行”模式过渡到“机器自主决策+人监督”模式,特 别是在极端环境作业、危险任务替代等场景中展现出巨大潜力。
d)标准化与安全性成为产业推进关键:随着工业具身智能系统 复杂度提升,如何建立统一的接口标准、数据协议、安全等级评价体 系成为制约其大规模落地的重要因素。
综上,工业具身智能将在未来制造系统的智能化、自主化与安全 化升级中扮演核心角色,成为工业4.0迈向工业5.0的关键支撑技术。
(四)工业具身智能安全特性
工业具身智能系统作为高度集成感知、认知、决策与执行功能的 智能体,其安全性评估需突破传统工业控制系统和信息系统的边界, 构建具身层、认知层、控制层与网络层多维度协同的安全评估体系。 本节从安全属性视角出发,对工业具身智能的关键安全特性进行系统 评估。
a)本体安全(Physical Safety)
本体安全是工业具身智能系统的第一道防线,主要指系统在与物 理世界交互过程中,所展现出的结构可靠性、执行稳定性与人员安全 防护能力。由于具身智能体往往直接作用于设备、材料乃至人员,必 须通过机械限力、物理隔离、急停机制、运动范围限制等方式确保不 会在执行过程中引发冲撞、夹击、坠落等物理伤害。此外,系统应具备完备的故障自诊断和容错控制机制,能够在异常情况下迅速响应、 停机或切换至安全模式,从而保障工业现场作业人员的生命安全与财 产安全。
b)网络安全(Cyber Security)
网络安全防护的核心目标是保障工业具身智能系统在运行过程 中所采集、传输与处理的数据的完整性、机密性与可用性,防止其被 篡改、泄露或伪造,覆盖从传感器到控制中心的全链路信息保护。鉴 于该类系统普遍依赖网络通信、边缘计算与远程协同,存在感知数据 被恶意注入、控制指令遭中间人劫持、模型参数被后门植入等风险, 直接危害工业具身智能系统感知准确性、决策可靠性与行为安全性。
因此,必须在工业具身智能系统架构层引入数据加密、安全身份认证、 访问控制与可信计算机制,从而实现从硬件、通信、软件到算法的多 重网络及数据安全防护。
c)控制安全(Control Robustness)
控制安全强调具身智能系统在执行动态任务过程中对扰动、干扰 及攻击的鲁棒性与稳定性保障。由于系统需在复杂环境中进行精确控 制操作,若控制环节遭遇干扰或模型失配,可能导致轨迹偏移、动作 错误乃至任务失控。因此,必须构建具备冗余控制、模型自适应和状 态反馈闭环机制的控制系统,确保在遭遇突发扰动、设备老化或外部 攻击时仍能保持任务执行的连续性与安全性,从而实现系统级的容错 控制与稳态恢复。
d)认知安全(Cognitive Trustworthiness)
认知安全主要指具身智能系统中的学习模型、感知算法与决策逻 辑在长期自主运行中保持可信、稳定、不被操控的能力。具身智能系 统往往嵌入深度学习、大模型、强化学习等复杂算法结构,在面对开 放环境与不确定任务时,可能因样本污染、模型过拟合或外部诱导而 生成不合理的策略行为。因此,系统必须具备算法行为可解释、输入 输出监测、模型版本审计与抗对抗攻击能力,确保认知层的推理逻辑 具备可信性、透明性与安全边界,防止认知偏差或被攻击引发系统整 体风险。
二、工业具身智能安全风险分析
(一)工业信息物理系统安全风险
聚焦工业信息物理系统(CPS)在网络通信层面面临的潜在威胁, 包括数据篡改、拒绝服务攻击(DoS)与通信链路的脆弱性,分析具 身智能设备在开放环境下的网络安全防护需求。工业具身智能深度依 赖的网络化控制架构,正成为系统性风险的放大器。通信协议标准化 滞后导致设备间数据接口暴露攻击面,恶意攻击者可利用协议漏洞实 施中间人攻击,篡改机械臂运动轨迹参数,造成加工精度失控或设备 物理碰撞。更隐蔽的风险在于时间敏感网络(TSN)的确定性传输机 制可能被劫持,攻击者通过精准时序扰动破坏多机协同节拍,触发生 产节拍链式崩溃。此类风险直接威胁产线物理安全,可能引发千万级 设备损毁事故。
(二)工业数据安全与隐私泄露风险
探讨工业具身智能在数据采集、传输与存储过程中可能暴露的安 全漏洞,尤其是敏感工业数据和用户隐私面临的非法访问、泄露和滥 用等风险。多源异构数据的聚合分析加剧了工业知识资产流失风险。 高价值工艺参数(如注塑成型温度曲线)在边缘计算节点的临时存储 过程中,可能因内存保护机制缺陷遭侧信道攻击窃取,导致企业核心 竞争力被逆向工程破解。更具破坏性的是,工业视觉系统采集的员工 操作行为数据若遭泄露,不仅违反个人信息保护法规,更可能被用于 社会工程学攻击,通过分析操作习惯弱点实施定制化网络渗透。
(三)工业人工智能算法模型安全性与可解释性
分析工业具身智能依赖的 AI 算法在模型决策过程中的不透明性 问题,重点关注模型攻击(如对抗样本)、训练数据污染以及算法不 可解释性所带来的安全隐患。黑箱化决策机制正在制造不可预知的失 控隐患。深度强化学习模型在动态环境中的自适应行为缺乏可解释性 支撑,例如 AGV 路径规划算法可能因奖励函数设计偏差,在避障逻辑 中隐含选择撞击货架的次优解。更危险的是,对抗样本攻击可针对性 欺骗工业检测模型,使质检系统对关键缺陷视而不见,导致批次性质 量问题流入市场。这种算法层面的不可控性,使得工业智能系统犹如 “定时炸弹”,随时可能触发质量安全事件。
(四)人机协作过程中系统失控风险
识别在工业现场中人机共融交互过程中可能出现的行为偏差、操作冲突与误判等情况,指出其对生产安全性与操作可靠性的潜在影 响。认知不对称导致的人机互信危机正在酝酿新的伤亡风险。当协作 机器人基于不可解释的决策逻辑突发异常加速时,操作人员因无法预 判其行为轨迹,可能陷入物理闪避困境。在汽车总装场景中,这种风 险尤为致命——机械臂的不可预测摆动可能将工作人员挤压于工装 夹具之间。现有安全防护机制依赖预设的电子围栏与急停按钮,但面 对智能设备自主决策产生的突发性危险动作,传统手段存在毫秒级响 应延迟的安全真空。
(五)系统性能评估不足与鲁棒性缺陷
评估工业具身智能系统在复杂、动态环境中的性能稳定性与抗扰 能力不足问题,强调缺乏标准化评估指标与验证机制所带来的安全隐 患。复杂环境下的性能退化可能引发灾难性失效。激光导航系统在粉 尘浓度超标时产生的建图偏差,若未纳入出厂检测标准,将导致 AMR 集群在雾霾天气集体“失明”,引发全厂区物流瘫痪。更严峻的是, 多模态感知系统的交叉验证机制存在设计漏洞,当视觉系统因反光干 扰失效时,力觉反馈可能无法及时接管控制权,造成精密装配环节的 批量性零件损毁。这种评估盲区使得工业智能设备成为“薛定谔的安 全体”。
(六)故障与恶意攻击共存的复合安全威胁
剖析具身智能系统在实际运行中可能同时面临自然故障与恶意 攻击的复合型安全挑战,探讨系统在双重威胁下的韧性设计与防御策略。自然劣化与人为破坏的叠加效应正在突破防御体系极限。减速器 齿轮磨损产生的振动信号异常,可能被攻击者伪装成正常工况特征, 诱导预测性维护系统延迟报警,最终导致产线紧急停机与设备永久性 损伤。此类复合攻击充分利用系统固有弱点,使得传统基于单一威胁 假设的安全设计彻底失效,可能造成指数级放大的损失——单个传感 器的协同故障可能通过智能调度算法演变为全厂区生产大瘫痪。
三、工业具身智能安全政策与标准现状
目前,虽然尚未有专门针对“工业具身智能”的安全政策出台, 但各国政府已在工业机器人、工业人工智能、工业互联网等相关领域 发布了多项政策和标准,涵盖了安全治理、标准体系建设、网络安全 防护等方面。
(一)国内外工业具身智能安全战略与政策法规
a)联合国推动人工智能伦理安全框架落地
联合国教科文组织于 2021 年 11 月发布《人工智能伦理问题建议 书》,其提出的伦理原则(如透明度、责任性、人类监督)为人工智 能安全治理提供了核心方向。建议书强调“人类中心主义”原则,要 求协作机器人等典型工业具身智能系统需通过物理安全设计与算法 伦理审查双重保障,确保在焊接、搬运等高危任务中优先保护人类操 作员的生命安全。2023 年 3 月 31 日,该组织号召各国立即执行《人 工智能伦理问题建议书》。