


随着人形机器人产业的快速发展,灵巧手作为具身智能机器人“最后一厘米”——末端执行器的战略地位愈发凸显末端执行器的战略地位愈发凸显。人类手部功能在日常生活与工业生产中不可替代,而实现超过20个自由度的机械仿生手,需要极高的设计与制造门槛,因此灵巧手被视为人形机器人最核心的部件之一。当前,灵巧手不仅在 BOM 成本中的占比逐年提升,更在工业制造、医疗康复、教育科研和服务场景中展现出广阔应用前景。
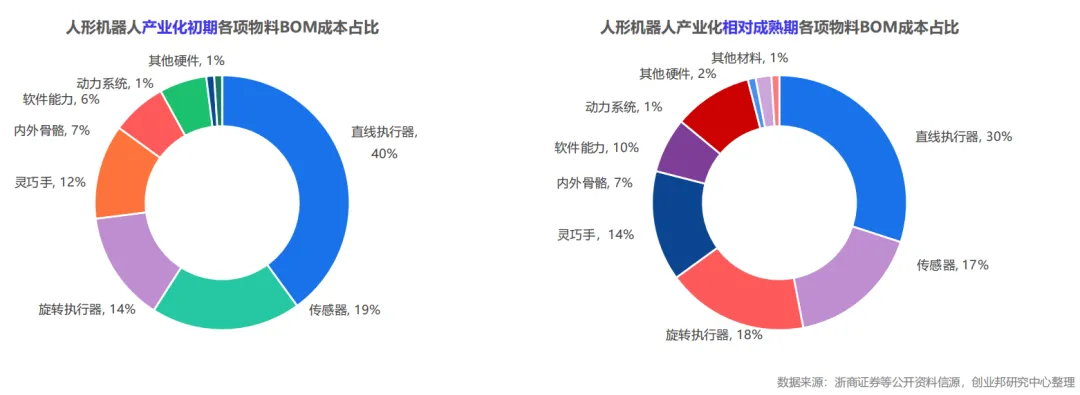
根据公开数据,2024年全球灵巧手市场规模达17亿美元,预计2030年将突破30亿美元;尽管市场规模尚小,但中国灵巧手市场在政策扶持、产业集群和资本助力下,正进入技术突破与产业化加速的关键阶段。长三角、珠三角与北京已形成产业高地,创新创业企业不断涌现,资本市场活跃度显著提升。未来,灵巧手将推动机器人从“执行工具”迈向“具身智能载体”,成为推动 GenAI 到 Agentic AI 再到物理AI 的重要介质,在重塑工业、医疗与服务业新生产力格局上发挥关键作用 。本报告旨在系统梳理灵巧手行业发展现状、生态格局、投融资动态与典型案例,为产业参与者和投资者提供洞察与参考。
PART 1 灵巧手市场发展现状
BOM占比进一步提升,灵巧手作为末端执行器的重要性与日俱增:
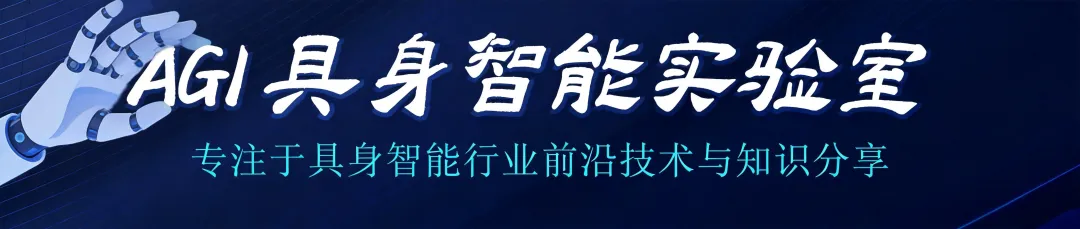
人体手部功能在全身功能中占有极其重要的位置:上肢功能占全身功能的 60%,手指功能占上肢功能的90%。而使用机械部件将自由度超20的人手功能实现需极其精密的设计、研发和生产,因此灵巧手成为人形机器人最为核心的标配部件,技术壁垒极高。人形机器人的价值在于适应人类所有环境,而灵巧手是人形机器人的末端执行器,理想状态是能执行各种各样的任务,需要具备负载能力、运动能力、控制能力和感知能力等。
根据浙商证券测算,在产业化初期和产业化成熟阶段,灵巧手在人形机器人BOM(注:BOM为制造某产品所需的所有物料成本总和)成本中分别占比为12%、14%。可见,随着人形机器人不断成熟,灵巧手在其中的BOM占比正进一步提升。
灵巧手作为一种新型的末端执行器,在机器人与环境的交互中起着关键作用。灵巧手根据驱动系统可分为液压驱动、电机驱动、气压驱动、形状记忆合金驭动四类。电机驱动是目前多指灵巧手的主要驱动方式。
中商情报网测算显示,2024年全球机器人灵巧手市场规模约 17 亿美元(数量为 76 万只),到2030年,全球机器人灵巧手市场规模将达到 30 亿美元(数量为141万只)。而我国政府对科技创新和智能制造的鼓励与支持为灵巧手行业提供了良好的发展环境。据智研咨询统计,2024年我国灵巧手行业产量为4,180只,行业潜力巨大。
◆近年来,国内多项政策惠及灵巧手行业持续推进:2023年工信部发布《人形机器人创新发展指导意见》,明确提出突破灵巧手等关键技术,构建国际领先的产业生态
① 《北京市促进机器人产业创新发展的若干措施》支持关键零部件和技术攻关,拓展机器人应用场景;
② 《深圳市具身智能机器人技术创新与产业发展行动计划(2025-2027年)》重点支持灵巧手等关键核心技术攻关;
③ 《上海市促进智能机器人产业高质量创新发展行动方案(2023-2025年)》提出打造具有全球影响力的机器人产业创新高地,增强灵巧手等高端环节研发制造能力;
④ 2024年4月,锡港沪机器人灵巧智能研究院签约落户无锡经开区,志在破解人形机器人应用场景中的关键问题“缺乏灵巧智能”,落地运行将提升机器人灵巧手和具身智能控制
系统的研究能力,成为集聚本土创新研发优势的一大引擎。
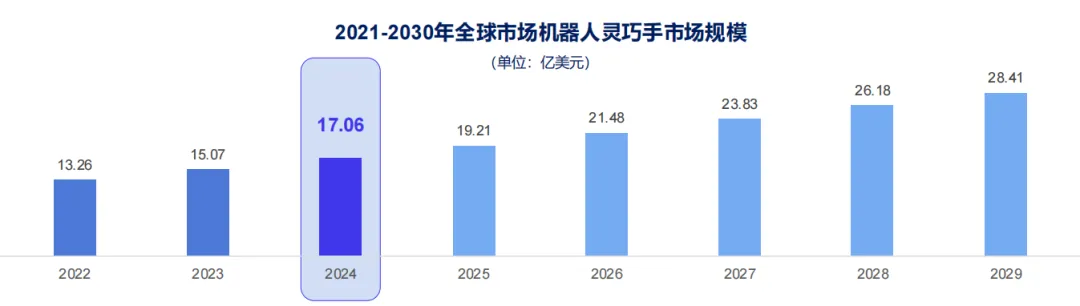
根据国泰海通证券测算,2024年全球灵巧手市场重点区域中,亚太地区市场份额占比最高达到37.9%,其次是北美地区(32.6%)和欧洲地区(25.3%);纵观全球灵巧手产业,美国、欧洲和中国已形成三足鼎立的竞争格局,2025年三地合计市场份额超过85%。其中欧洲地区以德国为主,以SCHUNK、Ottobock等厂商为代表。
国内灵巧手产业正处于技术突破与产业化加速的关键阶段,呈现出核心技术局部领先、应用场景快速拓展等特征,因此在区域分布上形成显著的产业集聚特征,主要集中在长三角地区、珠三角地区及北京地区。重点城市则包括深圳、上海、北京、杭州、苏州、东莞等城市,形成 “核心集群 + 特色节点” 的空间格局。

PART 2 灵巧手产业生态分析
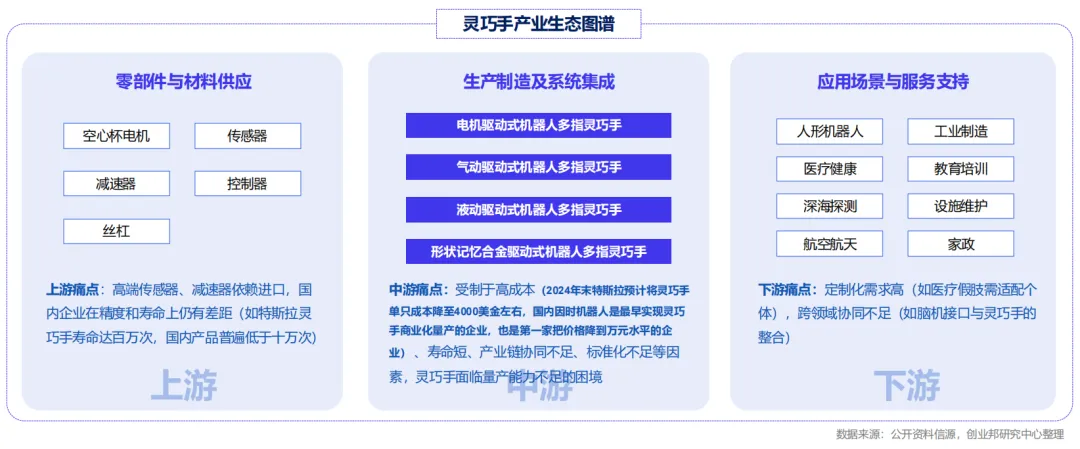
灵巧手行业产业链上游为核心零部件,包括空心杯电机、传感器、减速器、控制器、丝杠等;中游为机器人灵巧手生产制造,产品主要为电机驱动式机器人多指灵巧手、气动驱动式机器人多指灵巧手、形状记忆合金驱动式机器人多指灵巧手;下游应用为机器人,进一步应用于工业制造、高校教培及科研、医疗器材、航空航天等领域。灵巧手产业生态正在步入成熟,将推动机器人从 “执行工具” 向 “具身智能载体” 进化,重塑工业、医疗、服务等领域的生产力格局。

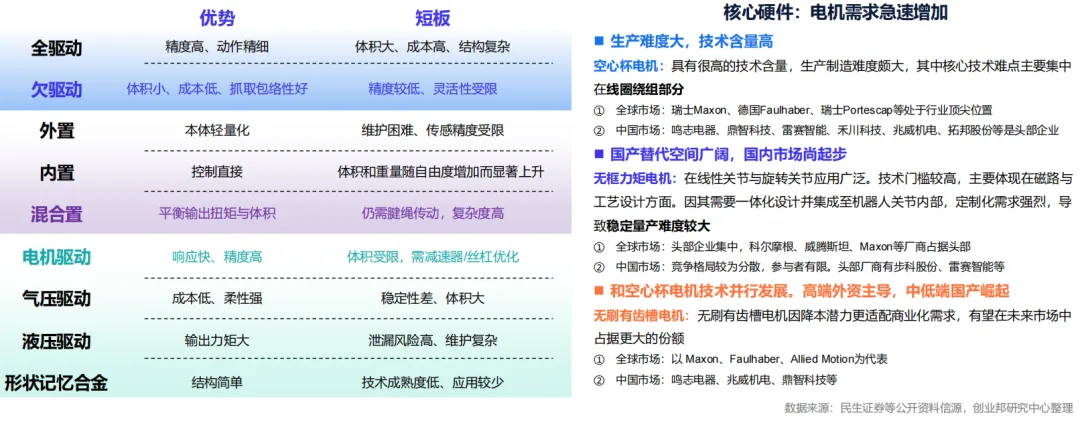
驱动模块:电机需求激增,核心硬件国产替代空间广阔
从自由度与驱动装置的数量关系来看,驱动方式分为全驱动和欠驱动(自由度>驱动装置);从驱动系统所在位置来看,分为外置和内置两种;从驱动力源类型来看,灵巧手驱动方式主要可分为电机驱动、气压驱动、液压驱动和形状记忆合金驱动(SMA)。而市场上目前的主流驱动方案主要采取“欠驱动+ 电机驱动”;此外,混合放置也成为当下一种新趋势。未来,驱动系统的优化方向包括提升电机功率密度、降低重量(如特斯拉采用无刷有齿槽电机);传动革新,引入超弹性材料(如镍钛合金丝)增强腱绳抗疲劳性;以及智能化,结合触觉传感器(如电容电阻式、磁电式)实现自适应抓握与决策
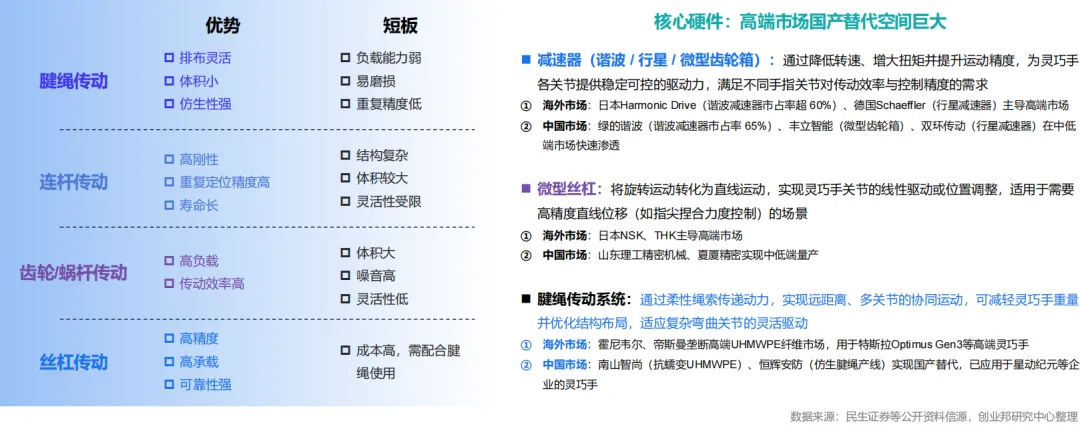
传动模块:高承载性与柔性成应用愿景,复合方案引领行业趋势
灵巧手传动系统的核心目标在于提升抓取稳定性和操作灵活性,同时需兼顾高精度、轻量化、仿生化和智能化需求,以适应工业协作、医疗手术、服务机器人等多样化场景。当前,灵巧手传动系统正朝着高精度、轻量化、仿生化和智能化方向发展
目前,灵巧手传动系统的主流方案为复合传动,例如特斯拉Optimus Gen3采用“行星齿轮箱+滚珠丝杠+腱绳”组合,驱动系统前置于前臂,通过腱绳驱动22自由度手指,兼顾精密操作与轻量化。微型丝杠+腱绳未来可能成为主流,兼具高承载与柔性优势
感知模块:力矩传感器和触觉传感器为实现内外交互关键部件
灵巧手的传感装置核心目标是通过多模态感知能力,实现对抓取力、触觉、位置等参数的精确测量,从而提升机器人操作的灵活性、安全性和拟人化程度。在感知模块中,传感器广泛使用,且正朝着多区域、柔性化、多模态趋势发展。
感知模块在当前的应用同样以复合方案为主,以力/力矩传感器+触觉传感器为主流组合,兼顾力控精度与触觉反馈,通过丝杠/齿轮实现高精度驱动,结合柔性腱绳优化空间布局,例如特斯拉的“行星齿轮箱+丝杠+腱绳”结构。
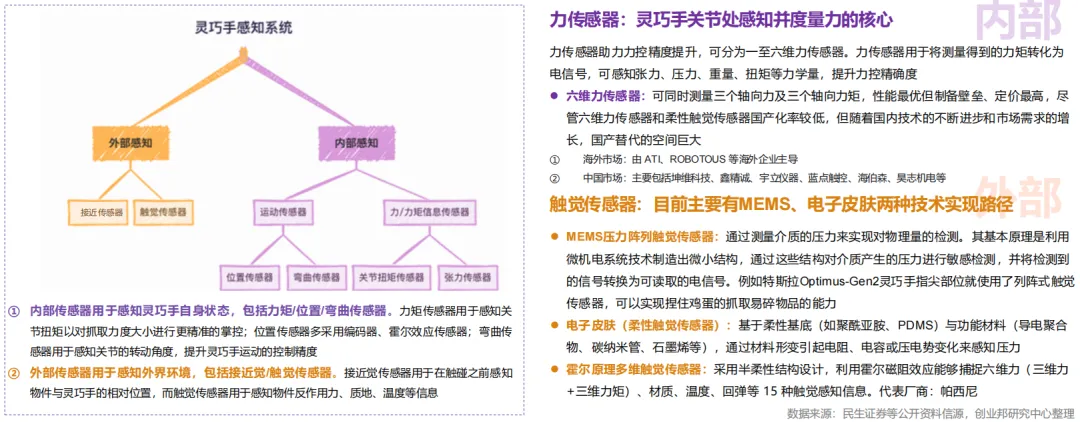
灵巧手的核心技术分为驱动、传动及感知三部分。驱动部分通过微型伺服电机等动力源为关节运动提供能量,可分为独立控制每个自由度的全驱动(灵活性高但成本高)和简化驱动降本的欠驱动(依赖机械结构实现多关节运动);传动部分借助齿轮、连杆、腱绳等机械结构传递动力实现多关节协同运动,需在轻量化设计与传动效率间平衡以保障抓握稳定性;感知部分则通过集成力/力矩、位置、触觉等传感器,实时感知硬度、压力及手指位置,为精准力控和精细操作提供数据支持。
中国灵巧手市场活跃「创新玩家-产品-场景」明细


PART 3 灵巧手一级市场投融资概况
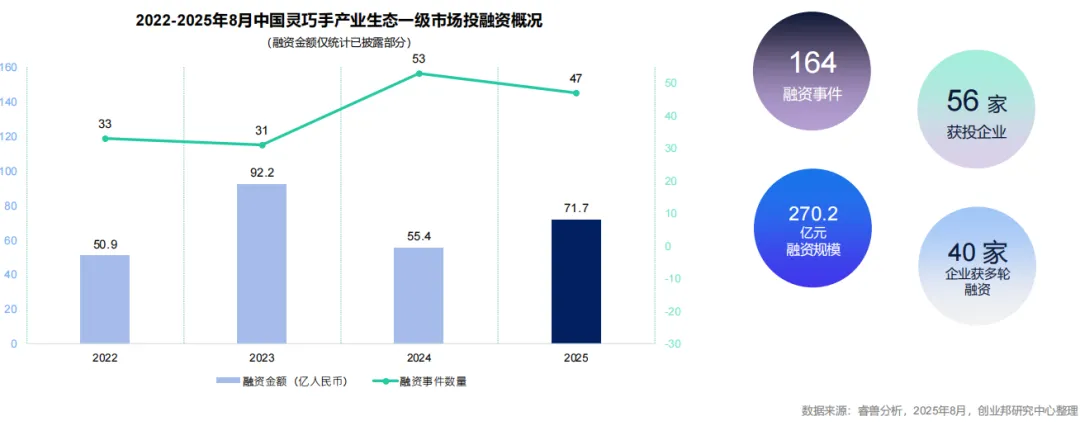
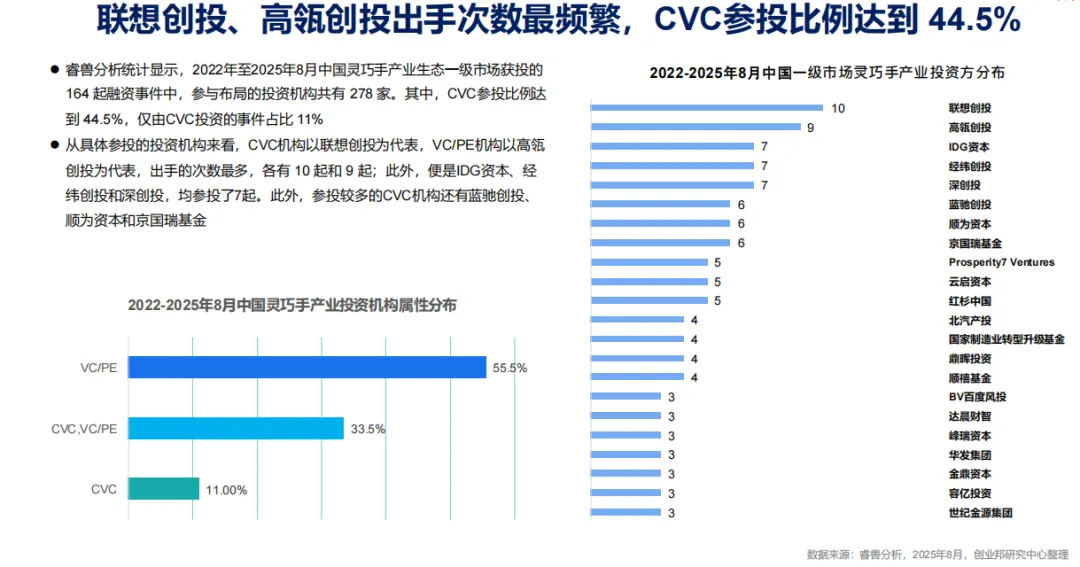
睿兽分析统计显示,2022年至2025年8月中国灵巧手产业生态一级市场累计发生 164 起融资事件,已披露融资总规模 270.2 亿元人民币。涉及到 56 家获投企业,其中有40 家企业获得多轮投资,占比高达 71.42%。
从年度分布来看,灵巧手一级市场获投数量呈上升趋势,2024年共发生 53 起融资事件,同比增长 70.9% ;2025年截至8月,已发生 47 起,已披露融资金额则达
到 71.7亿元,该数据已超过2024全年
近两年新成立企业占比 32%,其中绝大多数已获多轮资本押注
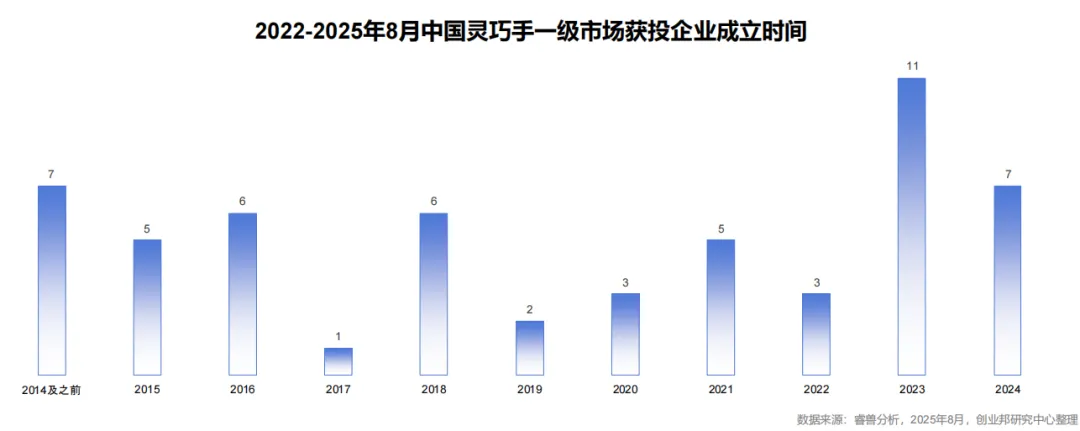
2022-2025年8月中国灵巧手一级市场获投企业成立时间
睿兽分析统计显示,2022年至2025年8月中国灵巧手产业生态一级市场获投的 56 家企业中,有 11 家成立于 2023 年,7 家成立于2024年,近两年新成立的企业占比达到32.1%,企业整体成立年限偏短。
在2024年刚成立的 7 家获投企业中,有 5 家已获得多轮投资;在2023年成立的 11 家企业中,有 10 家已获得多轮投资。
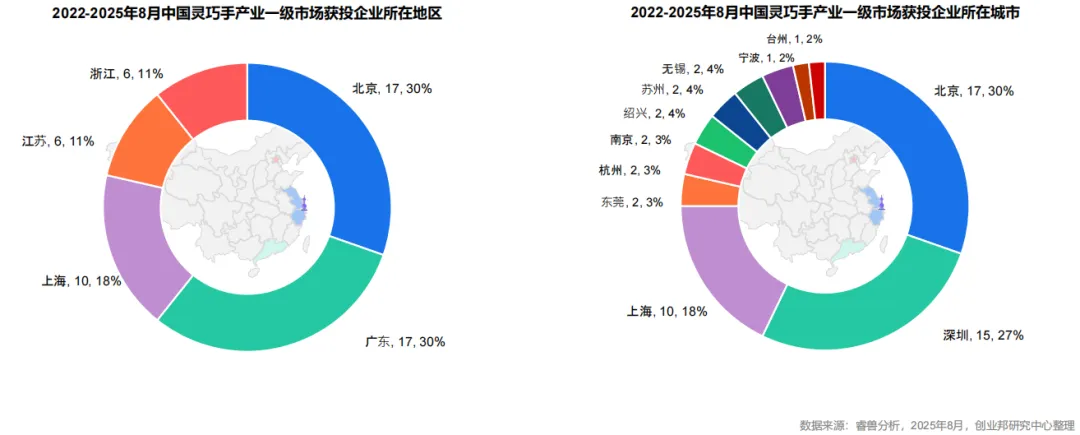
从所在区域来看,位于北京(17,30%)和广东(17,30%)的企业数量最多,其次是上海(10家,18%);从所在城市来看,北京(17家)、深圳(15家)、上海(10家)的灵巧手企业获投最多,其次还有东莞、杭州、南京、绍兴、苏州、无锡等地。和灵巧手所处的具身智能产业生态集群效应相呼应,集中于长三角地区、珠三角地区及北京地区。
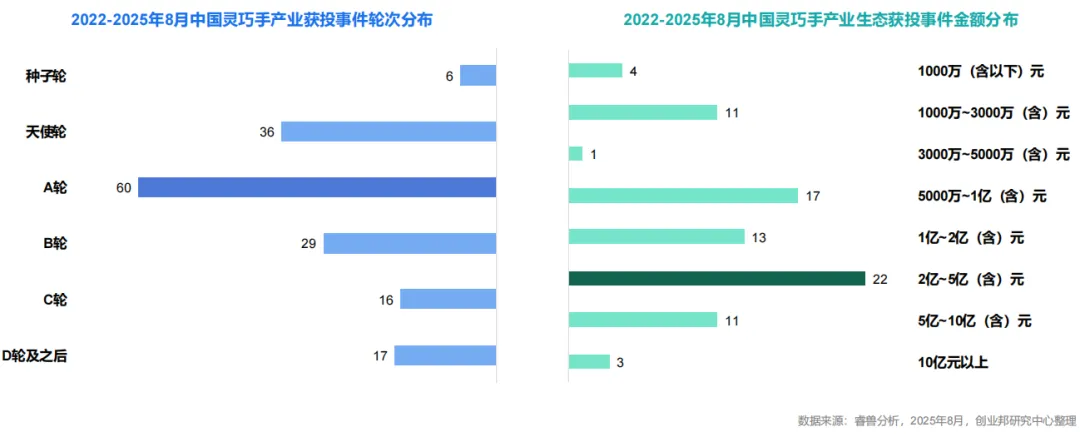
睿兽分析统计显示,2022年至2025年8月中国灵巧手产业生态一级市场获投的 164 起融资事件中,处于泛A轮的事件数最多,达到 60 起,其次是天使轮(36 起)和B轮(29 起);从获投金额来看,已披露融资金额的事件中,单笔融资处于 2-5 亿元区间的事件数最多,达到 22 起,其次是 5000万-1亿元(17起)。整体而言,灵巧手生态获投事件的单笔融资金额相对较高,与其较高技术壁垒所需的高价值投入有关。


PART 4 灵巧手案例分析
他山科技:通过AI触觉传感器精确赋能灵巧手、机械臂等产品形态
他山科技以触觉传感器为核心,构建了 “硬件 + 算法 + 场景” 的闭环能力,在灵巧手及人形机器人市场占据领先地位。其技术突破在于分布式三维力感知、边缘计算闭环及标准化单元设计,未来将通过大模型融合与仿真技术深化场景落地,同时应对硬件同质化竞争,巩固算法优势。
他山科技的触觉传感器适用于高精密操作的灵巧手,使其可以感知到细微的三维力变化和表面特征,提供超越人类的触觉感知。这种技术的应用,不仅提升了灵巧手处理脆弱物品的能力,有效促进了人形机器人场景闭环及泛化能力。
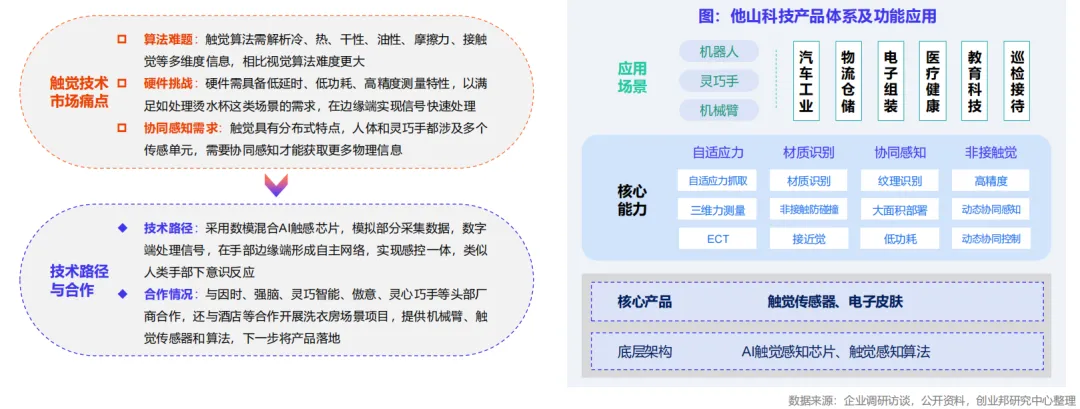
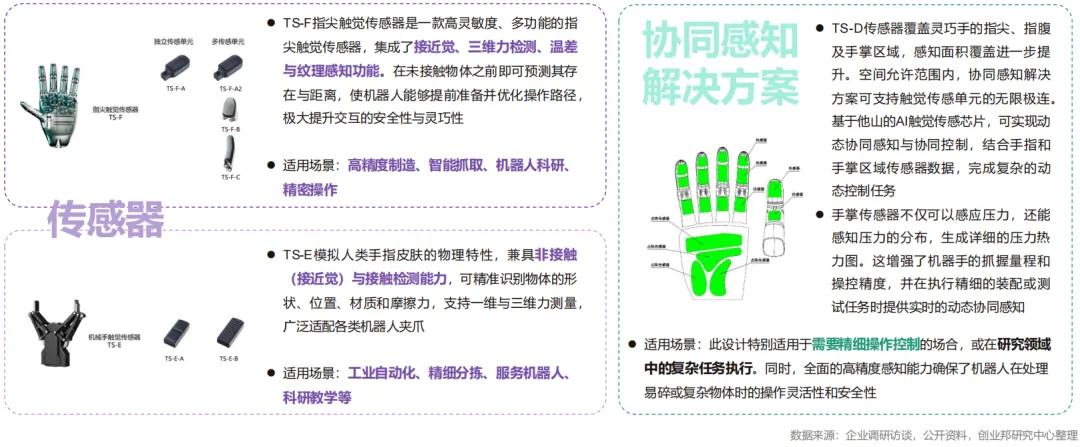
作为一家领先的人工智能触觉传感芯片及应用解决方案研发商,他山科技在机器人、灵巧手及机械臂等具身智能产品形态的应用上提供了丰富多元的传感器种类及相关解决方案。如下图所示,从TS-F到TS-E,再到TS-D,其传感器触觉感知能力逐步增加,适用于更加精细操作应用场景的能力也在同步增加。其中,专门执行复杂任务的TS-D传感器在协同感知解决方案中执行使用。
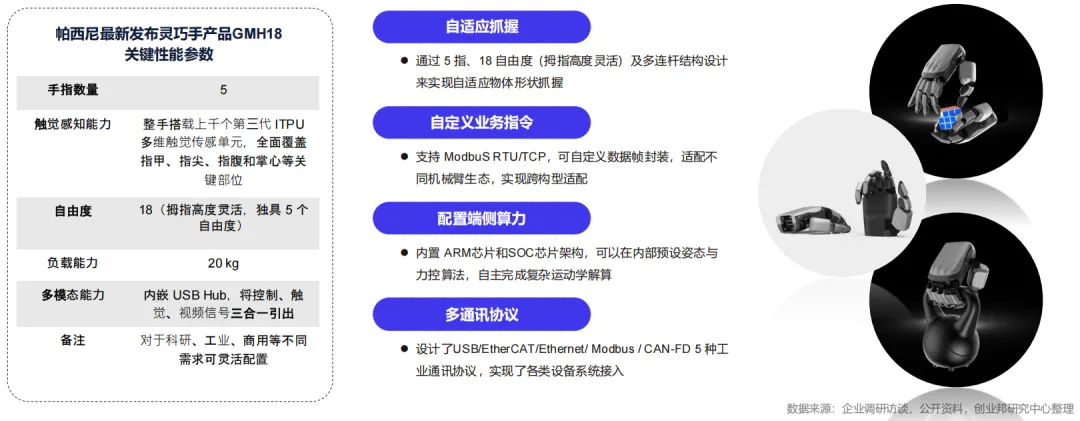
帕西尼:全球首创6D霍尔阵列式触觉传感技术
帕西尼第三代协作型多维触觉自适应灵巧手 GMH18(Give Me a Hand),专为通用场景下基础抓取与物体搬运而设计,旨在成为人类生产力的“得力搭档”。
在易用性方面,GMH18 内置 ARM SoC 芯片并预设多种手部姿态与力控算法,可自主完成多种手部复杂运动解算;同时 GMH18 支持多达 5 种不同类型的通讯协议,各类设备系统轻松接入,真正做到了“开箱即用”。
灵心巧手:依托于大量操作数据积累,All-In各类技术路线
灵心巧手成立于2019年,核心定位是专注于高自由度灵巧手的研发与生产,现已成为全球高自由度灵巧手市场的领导者。创始人周永受《哆啦A梦》启发,希望通过机器人执行器实现“未来的神奇口袋"--通过打造具身智能平台,推动2B和2C市场发展。
灵心巧手团队成员背景多元,多位核心成员曾在达闼机器人、九号、遨博等知名企业担任技术负责人,主要团队人才均来自于清华、北大等知名大学,注重动手能力与创新结合,鼓励自由探索与试错。
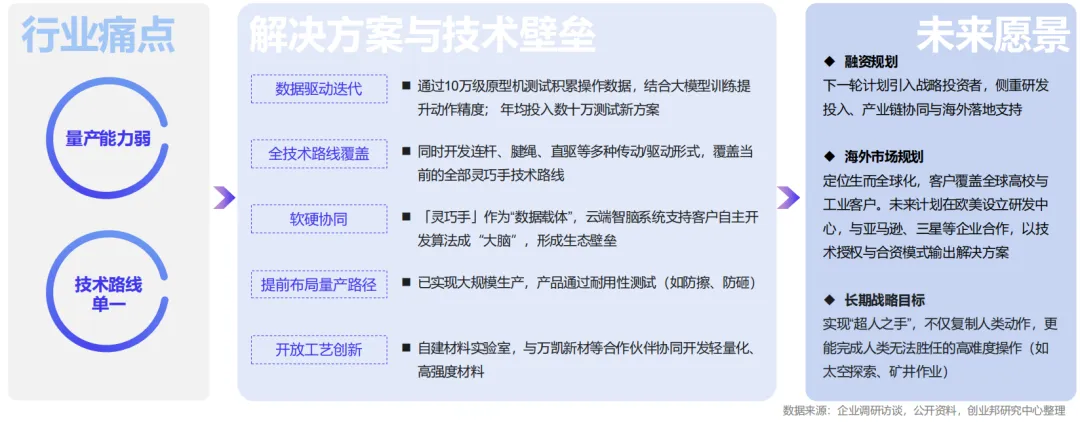
技术布局上,灵心巧手采取全路线覆盖策略,同步开发连杆、腱绳、直驱等多种驱动形式,以此推动灵巧手全技术路线演进。
在减速器方面,已布局谐波、行星、涡杆等多种技术方案,未来灵心巧手计划将自研减速器推向行业供应的产业位置。

PART 5 灵巧手行业趋势洞察
技术路径:从 “仿生模仿” 到 “智能涌现”
驱动系统:电机驱动主导,混合方案突破性能边界
空心杯电机凭借高功率密度成为主流选择,而形状记忆合金(SMA)等新型驱动材料开始崭露头角:中国科大研发的19自由度仿生灵巧手采用SMA人工肌肉,可完成梳头、写字等精细动作,液压、气压与电机驱动的混合方案将在高负载场景(如汽车工厂分拣)中实现突破:巨蟹智能研发的双臂机器人负载能力达50kg,采用电机+液压复合驱动提升稳定性。
感知系统:多模态融合与类人感知
力 / 力矩传感器、触觉传感器与编码器的协同成为标配:由上海交大研发的电子皮肤技术实现100点 /cm² 分辨率,可感知压力、温度等多维信息。在将来,量子力传感器将推动纳米操作技术突破。
算法还在持续优化:AI驱动的自主决策
强化学习(RL)与大语言模型(LLM)深度融合,推动灵巧手从 “指令执行” 向 “自主决策” 跃迁,例如,傅利叶 GR-1 机器人通过仿真环境训练,结合BEV+Transformer+OCC技术生成三维环境视图,实现端到端感知与运动控制。
产业生态:从 “单点突破” 到 “全链协同”
核心零部件的国产化进程加速
谐波减速器(绿的谐波)、空心杯电机(鸣志电器)等关
键部件实现量产,成本较进口产品降低 30%-50%:无锡蔚瀚智能联合威孚高科研发的 “艾德” 机器人,20余类零部件实现本地配套,其末端夹爪力控精度达 ±0.1N,已应用于汽车工厂分拣;深圳计划通过规模化生产将灵巧手成本降至 5000元。
区域集群正在崛起
➢ 长三角:上海临港聚焦医疗手术机器人,苏州强化工业场景,无锡打造人形机器人核心部件基地。例如,无锡人形机器人核心部件产业联盟整合20余家企业,蔚瀚等3家联盟内企业联合组装的谐波减速器一体化关节已与一家上市企业达成近4000套的合作。
➢ 珠三角:深圳提出打造全球灵巧手技术创新策源地,设立 10 亿元产业基金,推动 “研发 - 制造 - 应用” 闭环;东莞依托电子元件产业集群,形成 “1小时供应链配套圈”。
➢ 京津冀:北京聚焦脑机接口与纳米级操作,天津推动航天特种灵巧手产业化。
老牌上市公司跨界融合尝试蔚然成风
例如,汽车零部件厂商(如威孚高科)、轴承企业(如五洲新春)加速转型,切入灵巧手产业链。
应用场景:多场景渗透
服务机器人/人形机器人领域:类人化
灵巧手将集成情感识别算法,通过触觉反馈实现 “类人” 交互,例如在养老护理场景中提供安抚性触摸。例,傅利叶GR-1 灵巧手支持抓取力度调节,适用于迎宾接待、医疗康复。
医疗应用场景:距离“手术台”更近
微创机器人图迈腔镜手术机器人完成 50 例临床试验,灵巧手操作精度达0.1mm;威高 “妙手” 手术机器人成本仅为进口产品 10%,已在无锡二院开展腹腔镜手术。在康复领域,中国科大19自由度仿生灵巧手支持60种语言控制,临床测试患者满意度达92%,可完成手语手势与手机操作。
工业制造:服务场景颗粒度更细化
灵巧手将深度介入3C电子精密装配、半导体晶圆、搬运等场景。例如,钧舵机器人微型夹爪在锂电池PACK产线实现掉电自锁,提升安全性;意优智能一体化伺服关节支持人形机器人近30个关键关节需求,2024年销售额突破5000万元。此外,在航空航天、核工业等特种领域,灵巧手的效能也在渗透。
