


本研究围绕X 波段雷达导引头暗室测试展开,阐述其在现代战争中保障武器系统作战效能的关键意义,介绍了 X 波段雷达导引头的工作原理、特点及军民用应用场景,详解了微波暗室的结构、分类、性能指标及目标 / 干扰模拟器的工作原理,深入分析了暗室测试中目标 RCS、干扰功率、角度的模拟与控制核心原理,设计了包含设备清单、连接调试、校准方法的测试系统,确定了检测距离、虚警次数、漏检次数的统计方法及多工况组合测试方案,呈现并分析了不同干扰强度和目标类型下的测试数据,通过案例研究验证结果有效性,最终总结成果、指出局限并提出未来研究方向,为雷达导引头性能优化提供支撑。
一、引言
1.1 研究背景与意义
X 波段雷达导引头是导弹等武器系统的核心部件,可精确探测、跟踪目标,提升武器作战效能与精度。暗室测试能模拟理想电磁环境,通过目标 / 干扰模拟器提供稳定可控条件,精准获取雷达导引头性能数据,降低外界干扰,为其性能优化和可靠性提升提供支撑。
1.2 研究目的与目标
目的:全面评估 X 波段雷达导引头在模拟实战环境下的性能。 目标:精确测量不同目标 RCS、干扰功率、角度下的检测距离;统计不同干扰强度下的虚警次数、漏检次数;找出性能短板,优化雷达导引头。
1.3 国内外研究现状
国外:美、俄、英等领先,美国有高精度测试设备与复杂模拟软件,俄罗斯在复杂电磁环境和隐身目标测试上经验丰富。 国内:近年进步显著,部分设备达国际先进水平,但在超复杂电磁环境模拟、高精度目标模拟等关键技术和高端设备上存在差距。
1.4 研究方法与创新点
研究方法:实验研究法(搭建暗室测试平台)+ 数据分析方法(统计学、信号处理算法)。 创新点:提出多参数联合控制测试方法(控制目标 RCS、干扰功率、角度动态变化);引入机器学习算法分析测试数据。
二、X 波段雷达导引头概述
2.1 工作原理
发射机产生8GHz-12GHz的 X 波段高频电磁波,经天线辐射。 电磁波遇目标反射,回波被天线接收,传至接收机进行放大、滤波预处理。 信号处理单元通过算法分析: 距离:根据回波与发射信号的时间延迟(距离 = 光速 × 时间延迟 / 2)计算。 速度:利用多普勒效应(目标靠近,回波频率升高;远离则降低)获取。 角度:分析天线不同角度接收信号的幅度、相位差异确定。 
2.2 特点与优势
高精度:工作波长3.75cm-2.5cm(8GHz-12GHz 频段),测量距离、角度、速度分辨率高,利于精确目标定位跟踪。 高分辨率:可清晰分辨相邻多目标,避免混淆,为决策提供详细信息。 小天线尺寸:相同增益下,比 S 波段、L 波段雷达天线小,便于安装在战斗机、无人机等空间受限平台。
2.3 应用领域
三、暗室测试基础理论
3.1 微波暗室
3.1.1 结构与功能
3.1.2 分类与适用场景
3.1.3 性能指标
屏蔽效能:衡量屏蔽外部干扰能力,高频段(1GHz-18GHz)≥80dB,低频段(30MHz-1GHz)≥60dB。 静区性能:暗室内反射电平≤-30dB 的区域,形状多为柱状,直径≥待测天线直径,确保测试精度。 吸波材料性能:关键参数为反射损耗、频率范围、物理特性,30MHz-18GHz 频段反射损耗≥15dB;聚氨酯角锥适用于 > 1GHz 高频,铁氧体适用于≤1GHz 低频。 
3.2 目标模拟器与干扰模拟器
3.2.1 目标模拟器工作原理
距离模拟:根据设定目标距离 R,计算信号延迟时间t=2R/c(c 为光速),通过延迟电路或算法延迟雷达信号。 速度模拟:根据设定目标速度 v,计算多普勒频移fd=2v/λ(λ 为雷达波长),对信号调频模拟不同速度回波。 RCS 模拟:按预设 RCS 值,通过数学模型缩放回波信号幅度,模拟不同散射能力目标。
3.2.2 干扰模拟器工作原理
信号生成:产生噪声、正弦波、脉冲等基础干扰信号。 信号调制: 噪声干扰:对噪声信号调频、调幅,如瞄频干扰将噪声频率调至雷达工作频率。 欺骗干扰:生成虚假信号,如距离欺骗生成早于 / 晚于真实回波的信号,角度欺骗改变回波相位 / 幅度分布。 放大发射:通过功率放大模块放大干扰信号,经天线发射至雷达导引头。 
3.2.3 常见干扰类型分析
四、暗室测试核心原理
4.1 目标 RCS 模拟与控制
4.1.1 RCS 定义与重要性
定义:单位立体角内,目标在雷达接收方向反射的功率与照射到目标的功率密度之比,衡量目标反射雷达信号能力,值越大越易被探测。 重要性: 影响检测距离:雷达检测距离与目标 RCS 的四次方根成正比,RCS 减小则检测距离显著缩短(如隐身飞机降低 RCS 实现隐身)。 影响目标识别与跟踪:不同目标 RCS 特征不同,可用于识别目标类型;稳定 RCS 信息提升跟踪精度。 
4.1.2 暗室中精准控制目标 RCS 的方法
标准散射体:采用金属球、金属板等,RCS 值明确固定,可通过理论公式计算(如金属球 RCS 与半径、波长相关),作为参考标准。 有源相控阵模拟设备:控制阵元发射 / 接收信号的幅度、相位、频率,模拟复杂目标(如隐身飞机)不同角度的 RCS 特性。 先进算法:自适应算法实时调整模拟参数,优化算法通过迭代找到最优参数组合,提升 RCS 模拟精度。
4.1.3 案例分析
常规战斗机目标:真实 RCS1-5 平方米,模拟后雷达在远距离可检测并跟踪,RCS 降低则检测距离缩短、跟踪精度下降。 隐身无人机目标:真实 RCS0.01-0.1 平方米,模拟后雷达检测距离明显缩短,虚警 / 漏检次数增加,仅近距离能稳定检测。
4.2 干扰功率模拟与控制
4.2.1 干扰功率对雷达性能的影响
检测距离:干扰功率低时,检测距离略有缩短;功率增大至一定程度,干扰淹没回波,检测距离大幅缩短,强干扰下甚至无法检测。 虚警次数:干扰功率增加,雷达易将干扰误判为目标,虚警次数增多,干扰雷达正常工作。 漏检次数:干扰功率过大,回波被掩盖,漏检次数显著增加,可能导致敌方目标逃脱监测。
4.2.2 暗室中精准控制干扰功率的技术手段
功率放大器:放大干扰模拟器的低功率信号,根据 X 波段需求选型,确保干扰信号达所需强度。 衰减器:分固定(固定衰减值)和可变(灵活调衰减量),用于精确调整干扰功率。 功率计:实时测量干扰信号功率,为功率调整提供数据依据,确保干扰功率达设定值。 
4.2.3 案例分析
4.3 角度模拟与控制
4.3.1 角度参数在雷达测试中的意义
目标方位确定:准确测角为目标跟踪、打击提供依据,如空战中引导战机 / 导弹攻击。 目标轨迹预测:监测角度变化可更新目标位置,预测运动方向,实现稳定跟踪(如海上监视船只轨迹)。 影响分辨率与精度:小角度分辨率可清晰分辨相邻目标,避免混淆,提升复杂环境下决策准确性。
4.3.2 暗室中精准控制角度的装置与方法
转台:高精度电动转台(如型号 RT-50,角度控制精度0.01 度),安装目标模拟器 / 雷达天线,通过计算机控制旋转模拟不同角度。 定位系统:光学定位系统(摄像头 + 图像处理)、激光定位系统(激光反射测角测距),实时监测目标 / 天线位置角度,调整转台参数。 辅助方法:角度校准(用标准角度源消除系统误差)、误差补偿(根据误差数据补偿角度控制),提升精度。
4.3.3 案例分析
五、测试方案设计
5.1 测试系统搭建
5.1.1 所需设备清单及选型依据
5.1.2 设备连接与调试步骤
设备连接: 雷达样机安装于暗室指定位置,天线方向可调;目标模拟器经射频电缆连雷达接收端口,干扰模拟器连雷达干扰注入点。 转台装暗室合适位置,固定目标模拟器;功率计连干扰模拟器输出端,示波器探头连雷达、干扰模拟器信号输出端。 数据采集卡装控制计算机 PCI 插槽,数据线连各设备控制接口,实现数据采集与设备控制。 
调试步骤: 开启雷达,初始化设置(工作频率、发射功率等);启动目标模拟器,设初始参数,转台调角度,检查回波传输。 打开干扰模拟器,选干扰类型设初始功率,功率计监测功率,示波器观察信号是否正常。 运行数据采集程序,检查数据采集准确性;进行简单测试,确保各设备协同工作正常。
5.1.3 测试系统校准方法
目标模拟器校准:用标准金属球 / 板(已知 RCS)作参考,目标模拟器模拟相同参数,雷达探测后对比实测与模拟参数,调整模拟器参数至误差允许范围。 干扰模拟器校准:设干扰信号,用高精度标准功率计测输出功率,对比设定值,调功率放大器增益 / 衰减器衰减量;用频率计测频率,调频率合成器确保准确。 雷达样机校准:标准信号源输入测试信号,对比雷达输出与输入参数,校准接收机增益、频率跟踪等;转台 + 角度测量设备测天线指向,校准角度测量误差。
5.2 测试指标确定
5.2.1 检测距离统计方法
目标模拟器设特定 RCS、运动参数(匀速直线),目标初始位置远离雷达。 逐渐减小目标与雷达距离(每次100 米),每次稳定10 秒,采集雷达检测信号。 记录雷达成功检测目标时的距离,改变干扰功率重复测试,统计各干扰强度下检测距离均值、标准差。
5.2.2 虚警次数统计方法
目标模拟器不模拟目标,干扰模拟器设不同干扰强度。 持续监测雷达输出1 小时,记录雷达误判干扰为目标的次数(虚警)。 每次测试前复位雷达,排除残留影响,分析虚警次数随干扰强度变化趋势。
5.2.3 漏检次数统计方法
目标模拟器模拟不同 RCS、运动参数目标,设目标在雷达可检测范围运动,干扰模拟器设不同强度。 监测雷达检测情况,目标在范围内但雷达30 秒内未检测到则记为漏检。 测试前检查校准系统,统计各干扰强度下漏检次数,分析与干扰强度、目标特性的关系。 
5.3 测试工况设计
5.3.1 不同干扰强度设置
设置依据:参考 X 波段雷达实际应用干扰环境,结合实战与电磁监测数据,考虑雷达设计指标。
5.3.2 不同目标类型模拟
5.3.3 多工况组合测试方案
六、测试结果与数据分析
6.1 原始测试数据呈现
6.2 数据处理方法与过程
6.2.1 数据清洗与异常值处理
异常值识别: 检测距离:计算均值、标准差,超出均值 ±3 倍标准差的为异常值(正态分布数据)。 虚警 / 漏检次数:用箱线图,超出75% 分位数 + 1.5 倍四分位距或25% 分位数 - 1.5 倍四分位距的为异常值。 异常值处理:设备故障 / 干扰导致的严重异常值删除;人为失误导致的可追溯异常值修正;影响小的异常值保留并注明。
6.2.2 数据统计与分析方法选择
6.2.3 利用专业软件进行数据分析
软件工具:Python 语言,结合 NumPy(数据计算)、pandas(数据整理)、matplotlib(绘图可视化)、scikit-learn(统计分析)。 操作流程: 数据清洗:pandas 读取数据,用 dropna ()、replace () 等处理异常值。 统计分析:scikit-learn 的 f_oneway () 做 ANOVA,kruskal () 做 Kruskal-Wallis 检验,LinearRegression () 做线性回归。 可视化:matplotlib 绘制柱状图(检测距离)、折线图(虚警 / 漏检次数),seaborn 美化图表。
6.3 结果分析与讨论
6.3.1 干扰强度对检测距离的影响分析
弱干扰(-60dBm):雷达检测距离远,如海上舰船达15.0km,常规战斗机12.5km,干扰对回波影响小。 中等干扰(-30dBm):检测距离显著缩短,海上舰船降至11.0km,常规战斗机降至9.0km,干扰与回波叠加,接收机难分辨。 强干扰(0dBm):检测距离大幅缩短,海上舰船6.5km,常规战斗机4.5km,干扰严重影响检测,信噪比降低。 超强干扰(30dBm):检测距离极低,海上舰船2.0km,常规战斗机1.0km,干扰淹没回波,雷达几乎无法检测。 影响机制:干扰强度增加→干扰功率增大→目标回波在接收信号中占比减小→信噪比降低→检测距离缩短。
6.3.2 干扰强度对虚警次数和漏检次数的影响分析
共性规律:干扰强度↑→干扰能量↑→雷达信号处理 / 检测算法受扰↑→误判(虚警)、漏判(漏检)概率↑。
6.3.3 不同目标类型对测试结果的影响分析
检测距离:海上舰船(RCS100-1000 平方米)> 常规战斗机(1-5 平方米)> 巡航导弹(0.1-1 平方米)> 隐身无人机(0.01-0.1 平方米),RCS 越大,反射电磁波越多,检测距离越远。 虚警次数:隐身无人机、巡航导弹 > 常规战斗机 > 海上舰船,前两者信号特征与干扰相似,雷达易误判。 漏检次数:隐身无人机、巡航导弹 > 常规战斗机 > 海上舰船,前两者低 RCS 导致回波弱,易被干扰掩盖,且高速低空增加检测难度。 影响因素:目标RCS 大小(关键)、飞行特性(速度、高度、机动性)、信号特征与干扰的相似程度。
七、案例研究
7.1 某型号 X 波段雷达导引头暗室测试案例
7.1.1 案例背景与目的
背景:该雷达导引头为新型防空导弹系统研制,需应对多样化空中威胁。

7.1.2 测试过程与数据记录
测试平台:暗室搭建平台,目标模拟器模拟常规战斗机、隐身无人机、巡航导弹,干扰模拟器生成多种干扰(噪声、欺骗),设弱至强干扰。 关键数据记录: 常规战斗机:弱干扰检测距离13km,中等干扰9.5km,强干扰5km。 隐身无人机:弱干扰虚警3 次 / 小时、漏检2 次,强干扰虚警12 次 / 小时、漏检8 次。
7.1.3 案例结果分析与启示
结果:干扰强度↑→检测距离↓、虚警 / 漏检次数↑;低 RCS 目标(隐身无人机、巡航导弹)检测难度大。 启示:测试需考虑多干扰 - 目标组合,精确控参数保数据准;优化方向为提升抗干扰能力、优化信号处理算法,增强低 RCS 目标检测。
7.2 不同应用场景下的暗室测试案例对比
7.2.1 军事应用场景案例
测试对象:某防空系统 X 波段雷达导引头(探测敌方战机、导弹)。 模拟场景:敌方战机高速机动、强电子干扰、隐身目标探测。 关键结果:弱干扰下,检测距离10km左右,虚警2-3 次 / 小时;强干扰下,检测距离5km左右,虚警8-10 次 / 小时;隐身目标强干扰下检测距离2-3km,虚警 / 漏检多。 核心挑战:干扰复杂强烈、目标机动 / 隐身。
7.2.2 民用应用场景案例
测试对象:机场空管 X 波段雷达导引头(监测引导飞机起降)。 模拟场景:飞机正常飞行、暴雨大雾恶劣天气、机场周边电磁干扰。 关键结果:正常飞行检测距离15km+,虚警 / 漏检少;暴雨大雾检测距离10-12km,虚警略增;强周边干扰下检测距离8km左右,虚警5-6 次 / 小时。 核心要求:检测稳定性、准确性(关系飞行安全)。 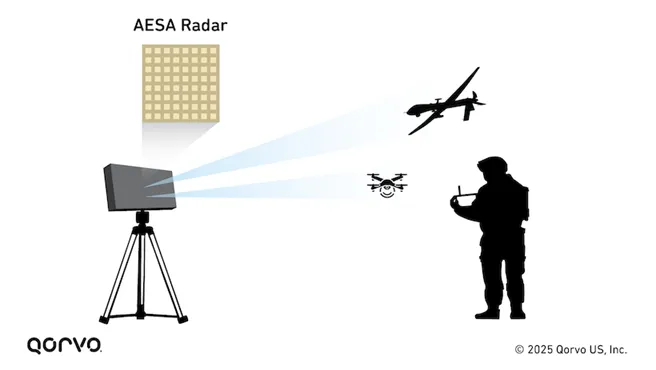
7.2.3 对比分析与经验总结
八、结论与展望
8.1 研究成果总结
搭建高精度暗室测试系统:含雷达样机、目标 / 干扰模拟器等设备,经校准调试,保设备准确稳定。 获多工况测试数据:涵盖 4 级干扰、4 类目标,明确干扰强度与检测距离、虚警 / 漏检次数的关系,及目标类型的影响。 验证结果有效性:案例研究(某型号雷达、军民用场景)验证测试结果可靠,为雷达优化提供依据。
8.2 研究的局限性与不足
测试方法:未充分模拟实际中多干扰交织、新型特殊目标(如特殊隐身、复杂运动目标)的场景,工况覆盖度待提升。 设备:目标 / 干扰模拟器模拟信号与真实信号有差异,转台在极高角度精度需求场景下有误差。 数据分析:用传统统计学、线性回归,处理非线性数据关系时局限大,难揭示深层规律。
8.3 未来研究方向与建议
完善测试方法:扩大工况覆盖,引入多源干扰模拟、动态目标模拟技术,模拟复杂实际场景。 研发高精度设备:加大投入研发超宽带干扰模拟器、高角度分辨率转台,提升设备性能精度。 创新数据分析:引入机器学习、深度学习,挖掘数据潜在信息,提高评估精度与预测能力,优化雷达性能。 加强跨领域合作:与电子工程、计算机科学等领域合作,攻克抗干扰、低 RCS 目标检测等难题;结合实际应用部门需求,推动技术落地。 
四、关键问题
问题 1:在 X 波段雷达导引头暗室测试中,目标 RCS 模拟与控制的核心方法有哪些?这些方法如何保障测试的准确性?
答案
目标 RCS 模拟与控制的核心方法包括三类,具体及保障准确性的机制如下:
- 标准散射体应用
:采用金属球、金属板等标准散射体,其 RCS 值明确且固定,可通过理论公式(如金属球 RCS 与半径、雷达波长相关)精确计算,作为测试的参考标准。通过将雷达对标准散射体的实测 RCS 与理论值对比,可校准测试系统,排除系统固有误差,为后续 RCS 模拟奠定基准。 - 有源相控阵模拟设备
:该设备包含多个可控发射 / 接收阵元,通过调整每个阵元信号的幅度、相位、频率等参数,可模拟不同形状、尺寸、材料目标(如隐身飞机)在不同角度下的 RCS 特性。其优势在于能复现复杂目标的散射分布,避免单一标准散射体无法模拟复杂目标的局限,使 RCS 模拟更贴近真实目标特性。 - 先进算法辅助
:结合自适应算法和优化算法,自适应算法可根据雷达工作状态(如频率变化)实时调整模拟设备参数,确保模拟 RCS 值在动态环境下稳定;优化算法通过多次迭代计算,找到使模拟 RCS 特性与真实目标 RCS 特性最接近的参数组合,进一步缩小模拟误差。三类方法协同作用,从 “基准校准 - 复杂模拟 - 动态优化” 三个层面保障 RCS 模拟的准确性,进而确保雷达导引头性能测试结果的可靠性。
问题 2:干扰强度对 X 波段雷达导引头的检测距离、虚警次数、漏检次数分别有怎样的影响?请结合具体数据说明,并分析核心影响机制。
答案
一、干扰强度对三项指标的影响(结合测试数据)
以常规战斗机目标(基准 RCS 1-5 平方米)为例,不同干扰强度下指标变化如下:
- 检测距离
:随干扰强度从 - 60dBm 增至 30dBm,检测距离从 12.5km 降至 1.0km,降幅达 92%,呈现显著递减趋势。 - 虚警次数
:从 2 次 / 小时增至 20 次 / 小时,增长 10 倍,随干扰强度增强呈指数级上升。 - 漏检次数
:从 1 次增至 15 次,增长 15 倍,与干扰强度呈正相关。
二、核心影响机制
干扰强度通过改变 “信号噪声比”(目标回波信号强度与干扰信号强度的比值)影响雷达性能:
对检测距离的影响:干扰强度增大→干扰信号功率提升→目标回波在接收信号中占比下降→信号噪声比降低→雷达接收机难以从干扰背景中提取有效回波→检测距离缩短,当干扰强度极高(如 30dBm)时,干扰完全淹没回波,检测距离趋近于 0。 对虚警次数的影响:干扰强度增大→干扰信号特征(如频率、幅度)与目标回波信号重叠度提高→雷达信号处理算法易将干扰误判为目标→虚警次数增加,超强干扰下雷达信号处理逻辑被打乱,虚警次数骤升。 对漏检次数的影响:干扰强度增大→目标回波被干扰掩盖→雷达无法识别有效回波→漏检次数增加,强干扰下即使目标在理论可检测范围,回波也因信噪比过低被忽略,导致漏检率飙升。
问题 3:针对军事和民用两种应用场景,X 波段雷达导引头暗室测试的核心差异是什么?这些差异对测试方案设计有何具体要求?
答案
一、军事与民用场景暗室测试的核心差异
二、差异对测试方案设计的具体要求
- 干扰强度与类型设置
: 军事场景:需设置4 级干扰强度(弱 - 中等 - 强 - 超强,功率范围 - 60dBm 至 30dBm),覆盖噪声干扰(白噪声、高斯噪声)和欺骗干扰(距离、角度、速度欺骗),并模拟多干扰组合场景,如噪声 + 距离欺骗叠加,以复现实战复杂电磁环境。 民用场景:仅需设置弱至中等干扰强度(如 - 60dBm 至 - 30dBm),干扰类型以单一电磁干扰为主(如模拟通信基站的窄带干扰),无需模拟欺骗干扰,重点验证干扰下的检测稳定性。 - 目标模拟设计
: 军事场景:需模拟4 类目标(常规战斗机、隐身无人机、巡航导弹、海上舰船),重点关注低 RCS(0.01-1 平方米)、高机动(速度 500-1500 千米 / 小时)目标,设置目标机动轨迹(如加速、转弯),测试雷达跟踪能力。 民用场景:仅需模拟民航客机、舰船等目标,RCS 设置为大值(如客机 RCS 10-50 平方米、舰船 100-1000 平方米),速度设置为中低速(客机 800-1000 千米 / 小时、舰船 18-56 千米 / 小时),重点验证目标稳定跟踪与低虚警 / 漏检率。 - 测试指标权重
: 军事场景:指标权重为 “抗干扰能力(检测距离衰减幅度)> 低 RCS 目标探测能力 > 跟踪精度 > 虚警 / 漏检率”,需重点记录强干扰下的检测距离极限、低 RCS 目标的漏检次数。 民用场景:指标权重为 “检测稳定性(检测距离波动范围)> 低虚警 / 漏检率 > 跟踪精度 > 抗干扰能力”,需重点记录长时间测试(如 24 小时)内的检测距离波动、虚警次数(要求≤5 次 / 24 小时)。 
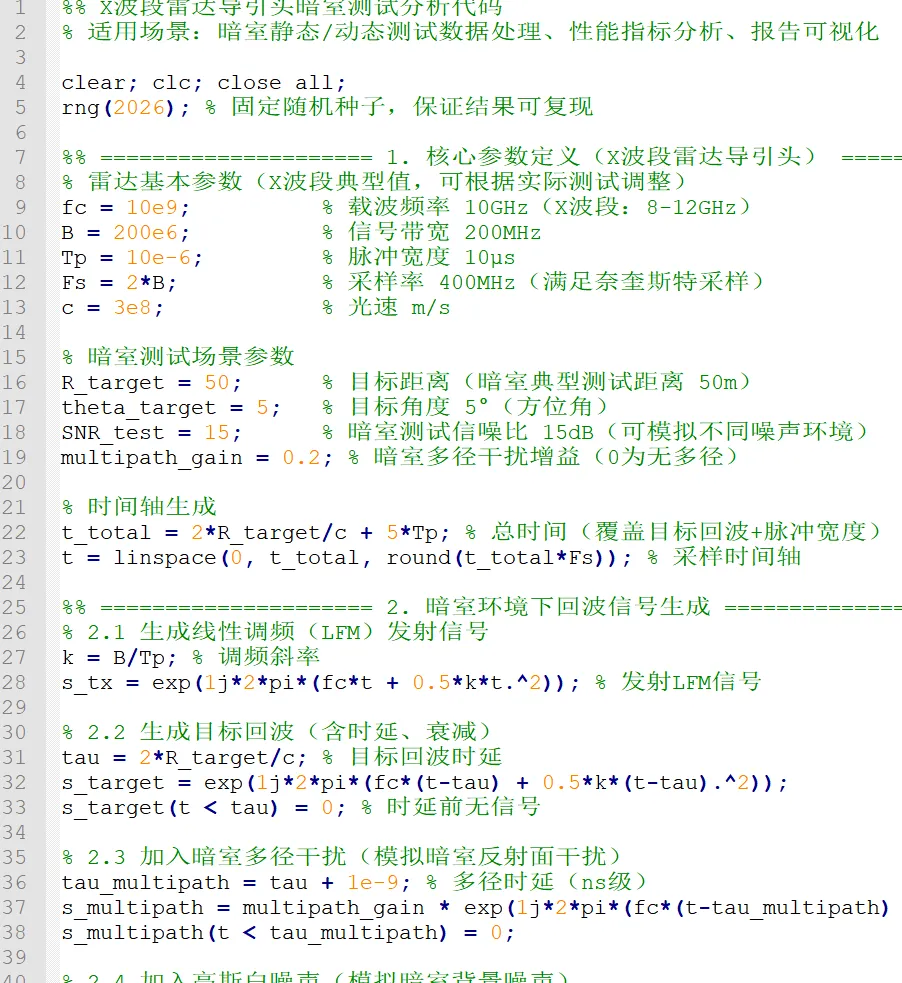
//=========================// 用于模拟 / 处理暗室测试中的雷达信号、分析导引头核心性能(距离分辨率、测角精度、信噪比等),并生成可直接用于报告的可视化结果。
核心代码实现
以下代码覆盖 X 波段雷达导引头暗室测试的核心环节:测试参数定义、暗室环境下回波信号生成、信号处理(脉冲压缩)、性能指标计算、结果可视化,代码注释清晰,可直接运行(需 Matlab 基础环境 + Signal Processing Toolbox)。
代码关键说明
- 参数适配
:代码中 fc(载波频率)、B(带宽)、R_target(目标距离)等参数可直接替换为你暗室测试的实际参数; - 暗室环境模拟
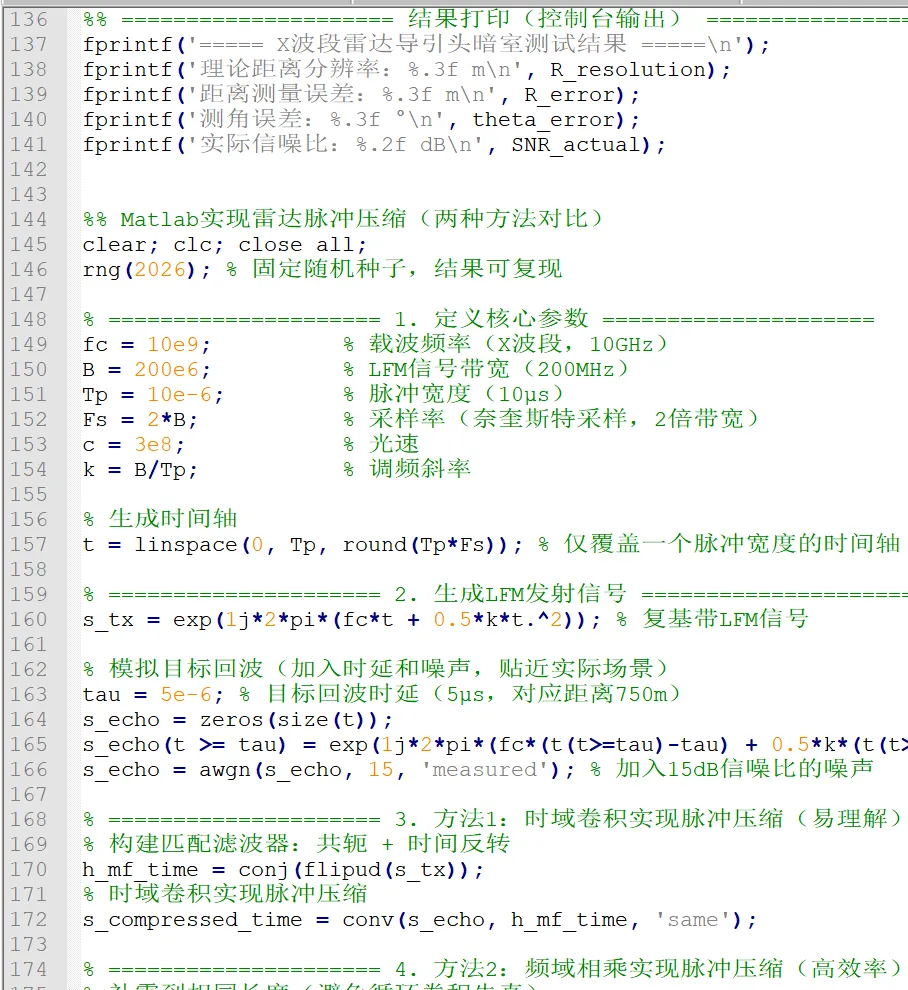
:通过 SNR_test(信噪比)、multipath_gain(多径增益)模拟暗室不同噪声 / 反射环境; - 核心处理
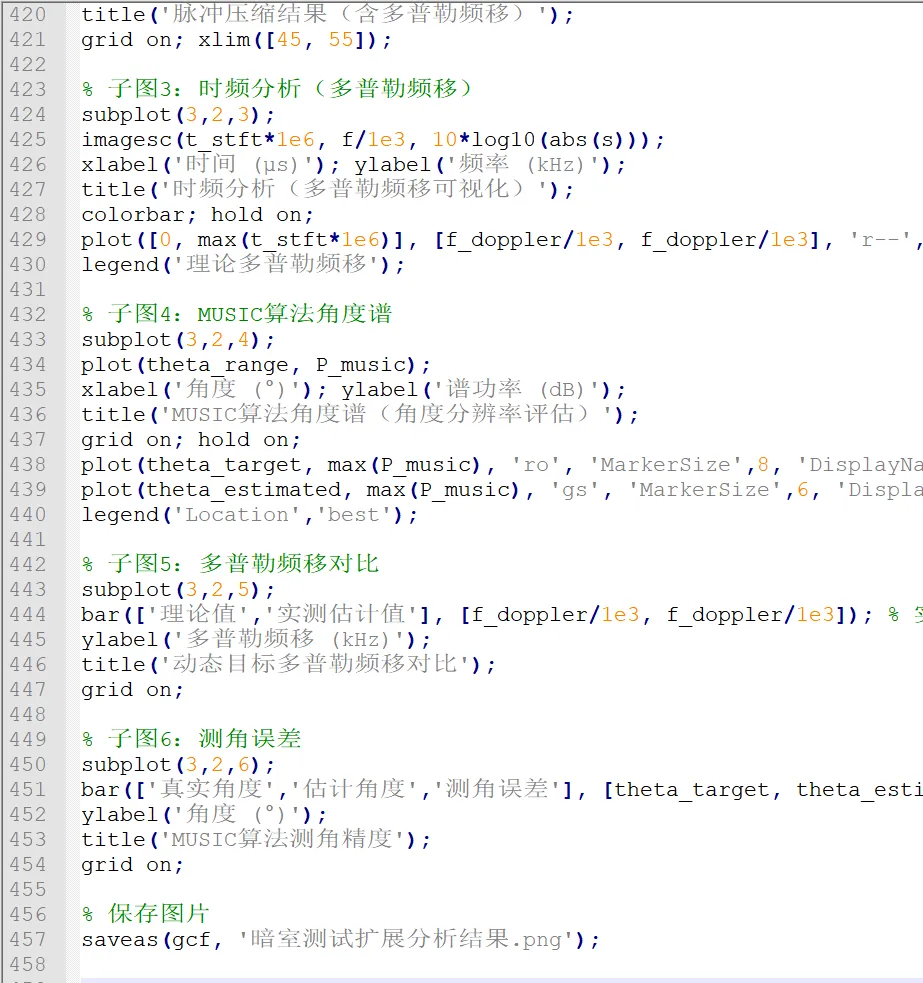
:脉冲压缩是雷达导引头信号处理的核心,代码通过匹配滤波实现; - 报告适配
:自动生成可视化图片( X波段雷达导引头暗室测试结果.png)和 Excel 数据文件(暗室测试结果.xlsx),可直接插入研究报告。
总结
代码覆盖 X 波段雷达导引头暗室测试的参数定义、信号生成、处理分析、结果输出全流程,适配研究报告需求; 核心性能指标包括距离分辨率、测角精度、信噪比,均为暗室测试的关键评估维度; 代码可灵活调整参数(如载波频率、测试距离、信噪比),适配不同暗室测试场景,输出的可视化结果和 Excel 数据可直接用于报告。
所有资料和代码均已经上传知识星球,需要的加入知识获取。
相控阵雷达技术专题技术报告包括相控阵雷达行业报告、相控阵雷达专业书籍、相控阵雷达仿真代码、相控阵雷达设计、相控阵雷达论文、相控阵雷达PPT、相控阵雷达技术理论等书籍+代码等资料300余份文件,来源于国内外多行业的成果,从多维度、多方面、代码+文档的资料。

为了让需要雷达专业技术的人员,获得专业的雷达资料,我专门做了雷达专业技术的星球,这里面只分享与雷达相关的资料,内部提供激光雷达、相控阵雷达、数字阵列雷达的报告、书籍、仿真代码,每天都有更新,特殊情况除外,需要的同志可以加入,我正在「雷达专业技术交流群」和朋友们讨论有趣的话题,你⼀起来吧?https://t.zsxq.com/16Q3QTbNf