


文章摘要
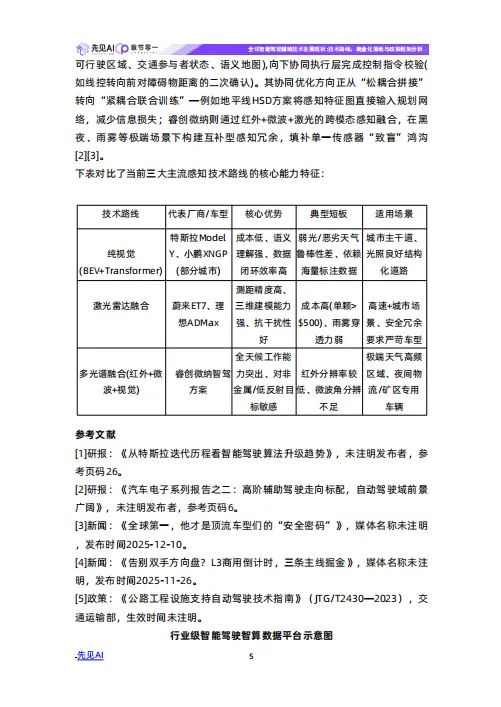
感知系统作为智能驾驶的“感官中枢”,其技术路线正经历从单模态依赖向多模态融合、从规则驱动向数据与模型双驱动的深刻演进。早期L1/L2阶段普遍采用以毫米波雷达+前视摄像头为主的“雷达主导”配置,功能边界集中于AEB、ACC等结构化道路场景;进入L2+阶段后,激光雷达开始规模化上车(如小鹏G9 、蔚来ET7),叠加环视+侧视摄像头与超声波雷达,形成“视觉+激光雷达+毫米波”三重冗余架构,显著提升对静态障碍物、施工区、异形物体的识别鲁棒性;当前L3级落地前夕,以特斯拉BEV(Bird’sEyeView)+Transformer为核心的纯视觉大模型范式加速普及,通过端到端神经网络实现从原始图像像素到行车意图的直接映射,推动行业迈向“重感知、轻地图”的新阶段[1]。
文章内容
受篇幅限制,仅为部分报告预览
回复暗号:全球智能驾驶辅助技术发展现状:技术路线、商业化落地与政策框架分析-43页
-------------------------------------------------------------------------
*免责声明:以上报告均为本公众号通过公开、合法渠道获得,报告版权归原撰写/发布机构所有,如涉侵权,请联系删除;本号报告为推荐阅读,仅供参考学习,不构成投资建议。
往期报告精选









点分享

点收藏

点点赞

点在看