



(点击查找星球报告?)

摘要
报告类型:互联网信息、人工智能
关键词
具身智能、新质生产力、人形机器人、感知 - 决策 - 执行、VLA 大模型、Sim2Real、区域产业集群、京津冀、长三角、珠三角、高校科研、场景落地、标准体系、功能安全、伦理治理
研究概述
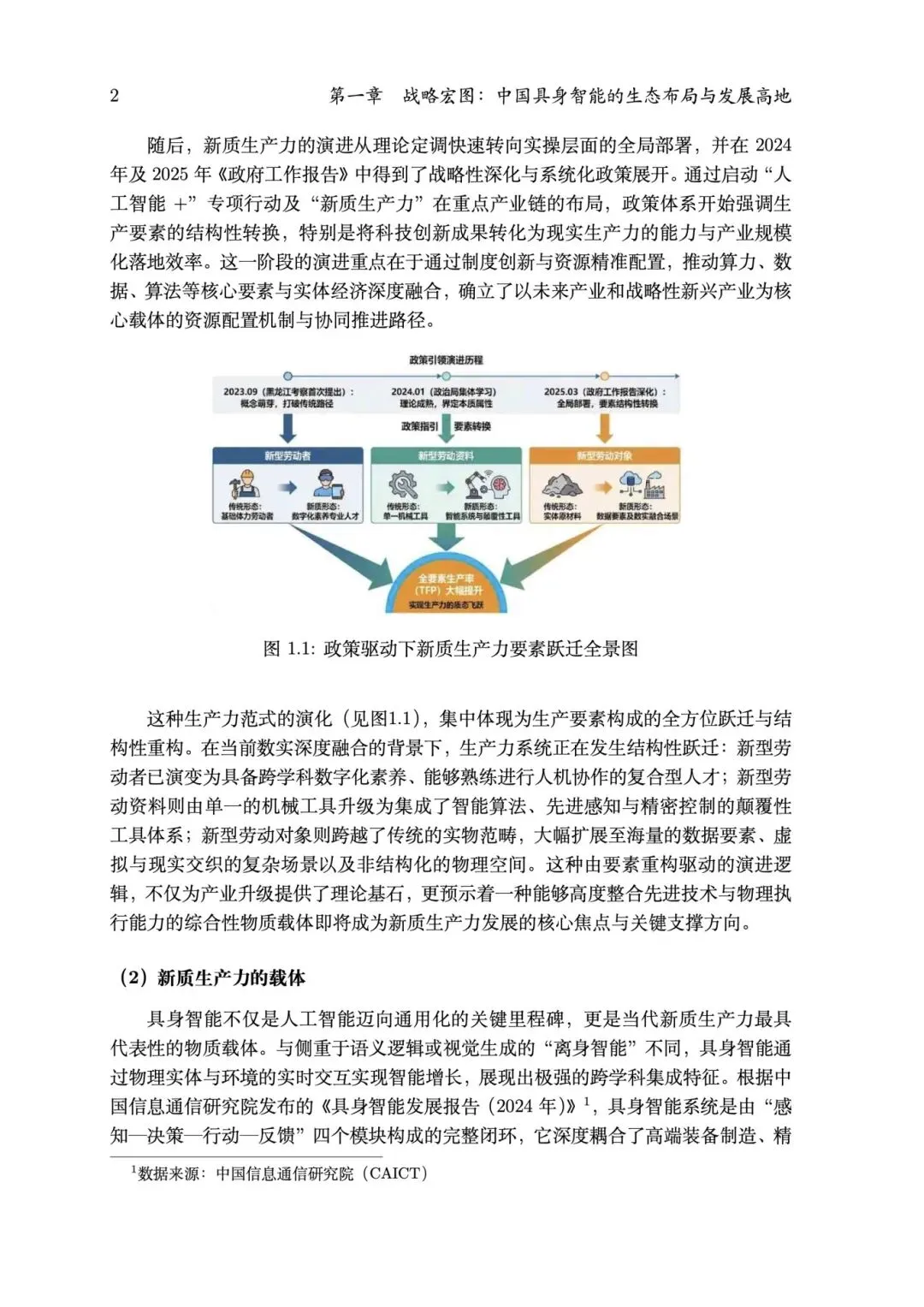
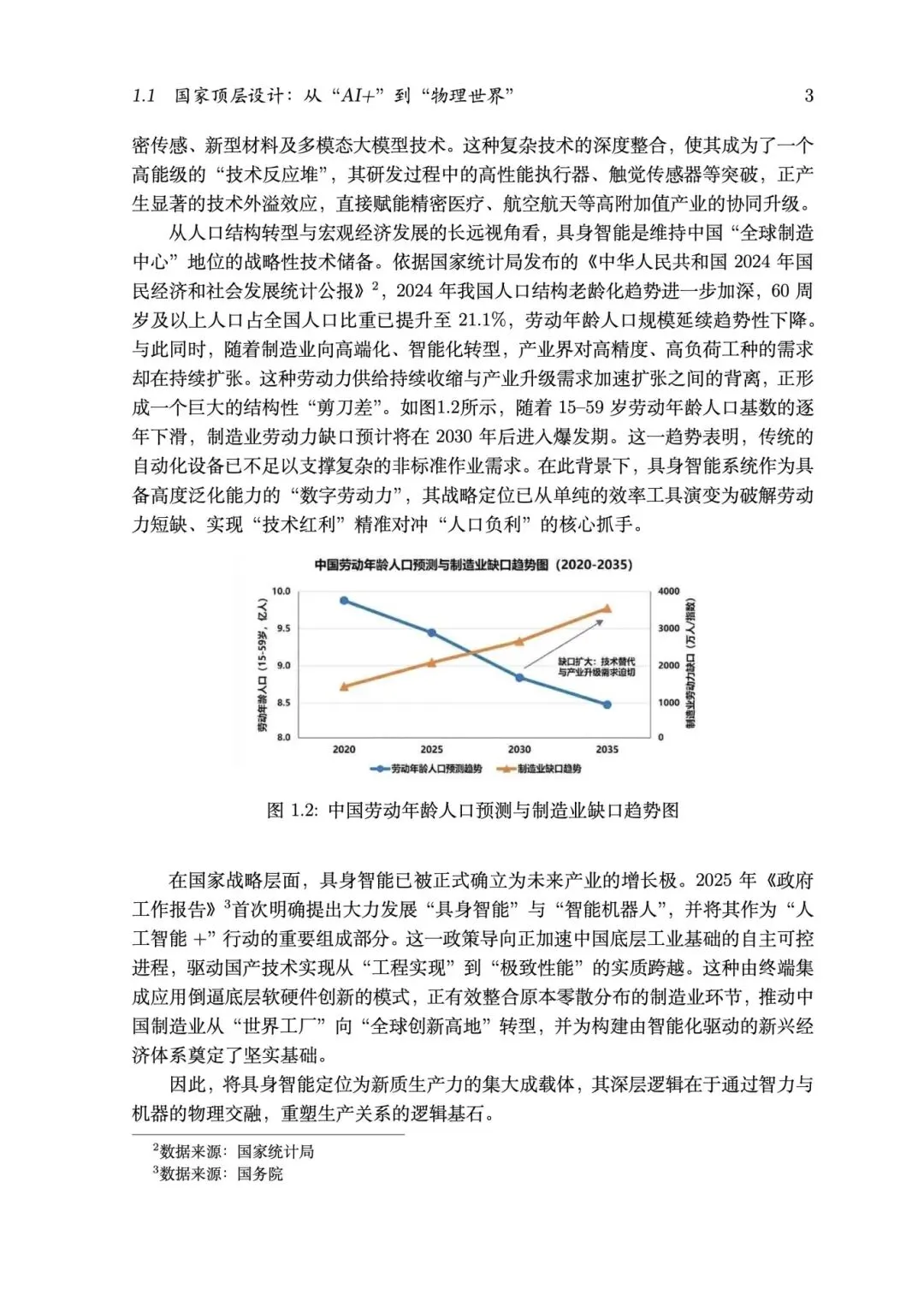
本白皮书立足国家 “新质生产力” 战略,明确具身智能是人工智能向物理世界延伸的核心载体,也是应对人口老龄化、制造业劳动力缺口的关键技术。报告梳理国家与地方多层政策体系,划分京津冀、长三角、珠三角三大核心产业集群与合肥、成都、山西等差异化特色集群;解析感知、决策、执行三大核心技术闭环,分类介绍工业、商业、特种作业、医疗陪护等落地场景。同时指出数据、硬件、极端工况等行业瓶颈,并提出通用大模型、模块化硬件、云边端协同、人机共生四大未来趋势。
研究要点
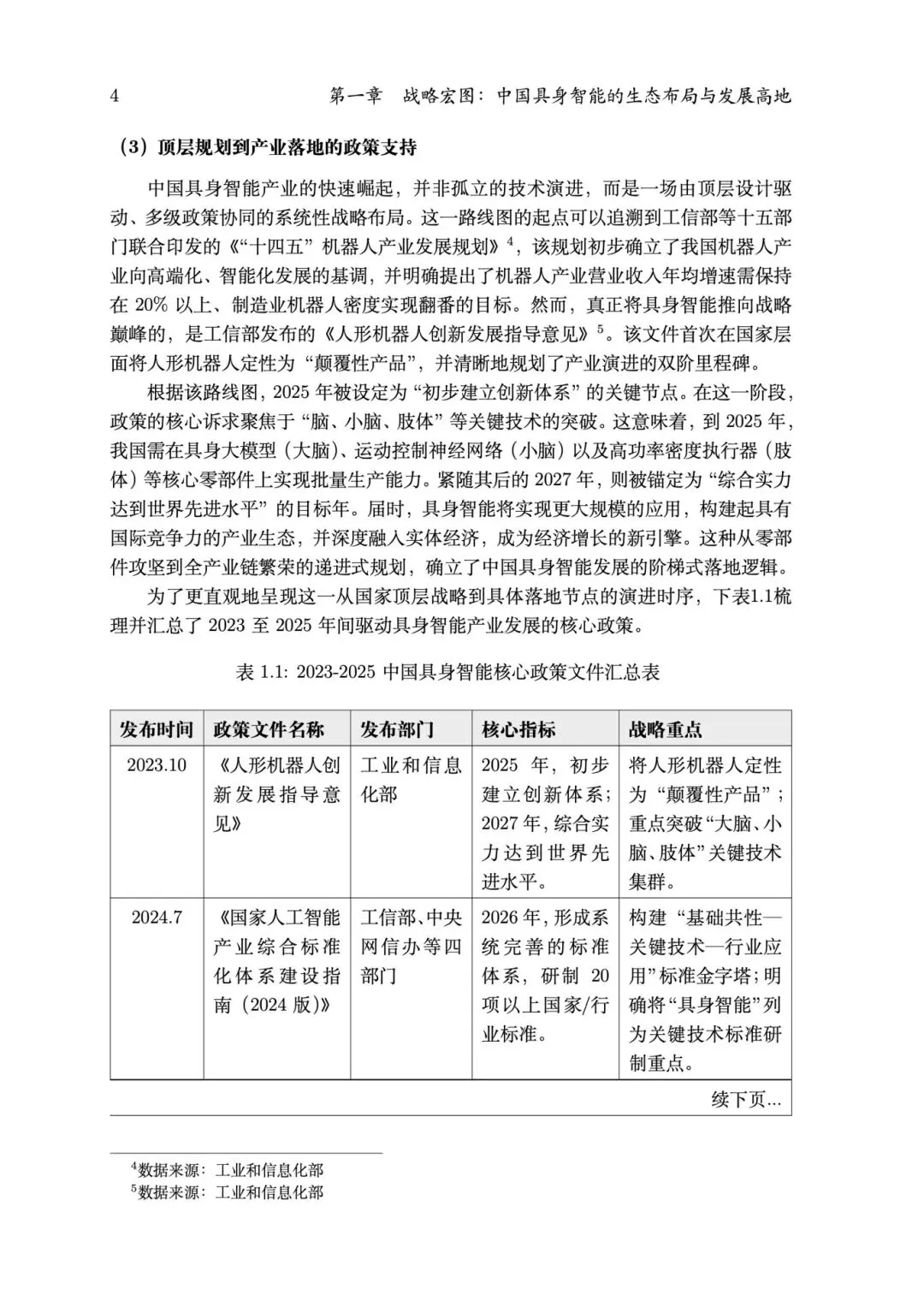
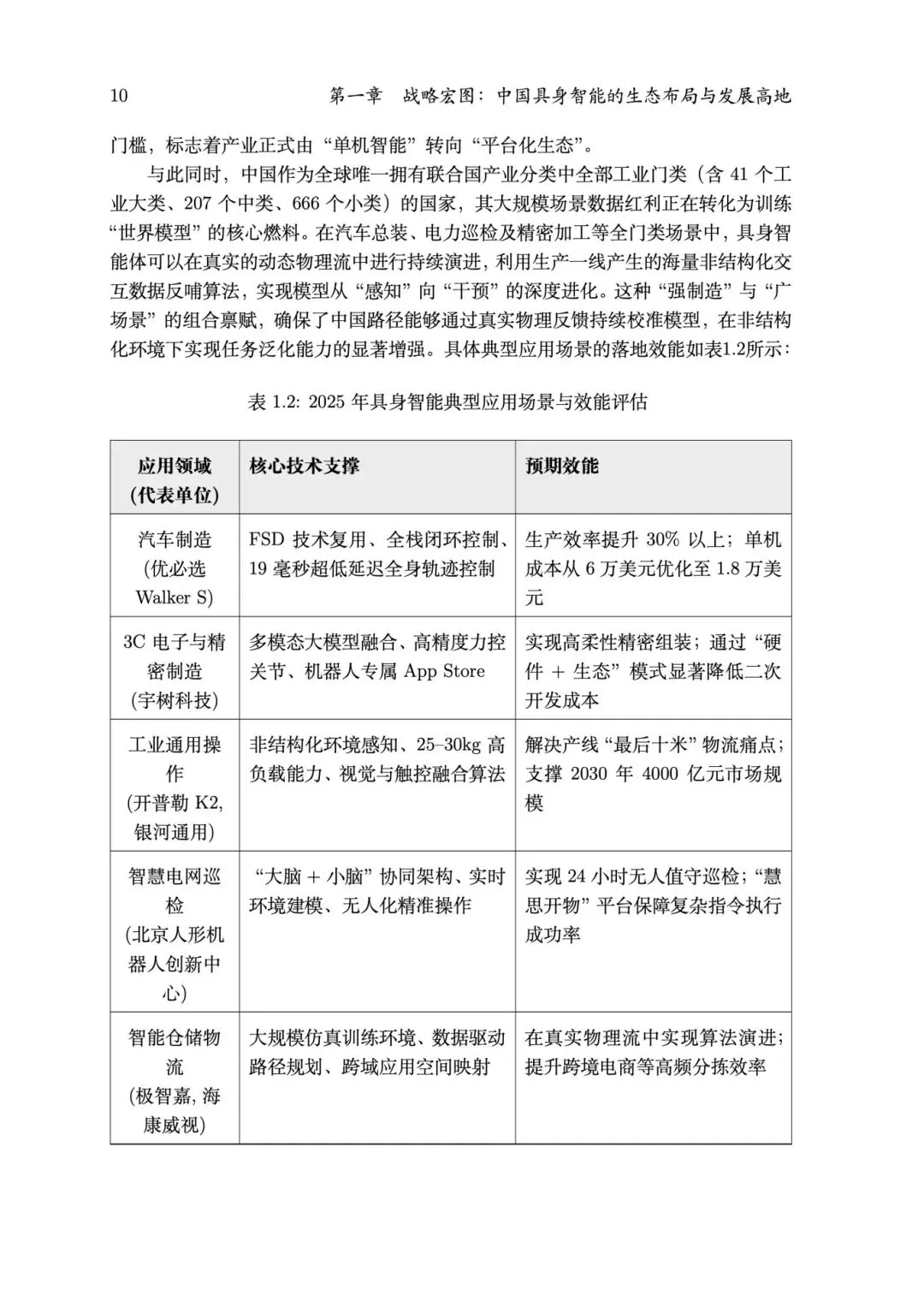
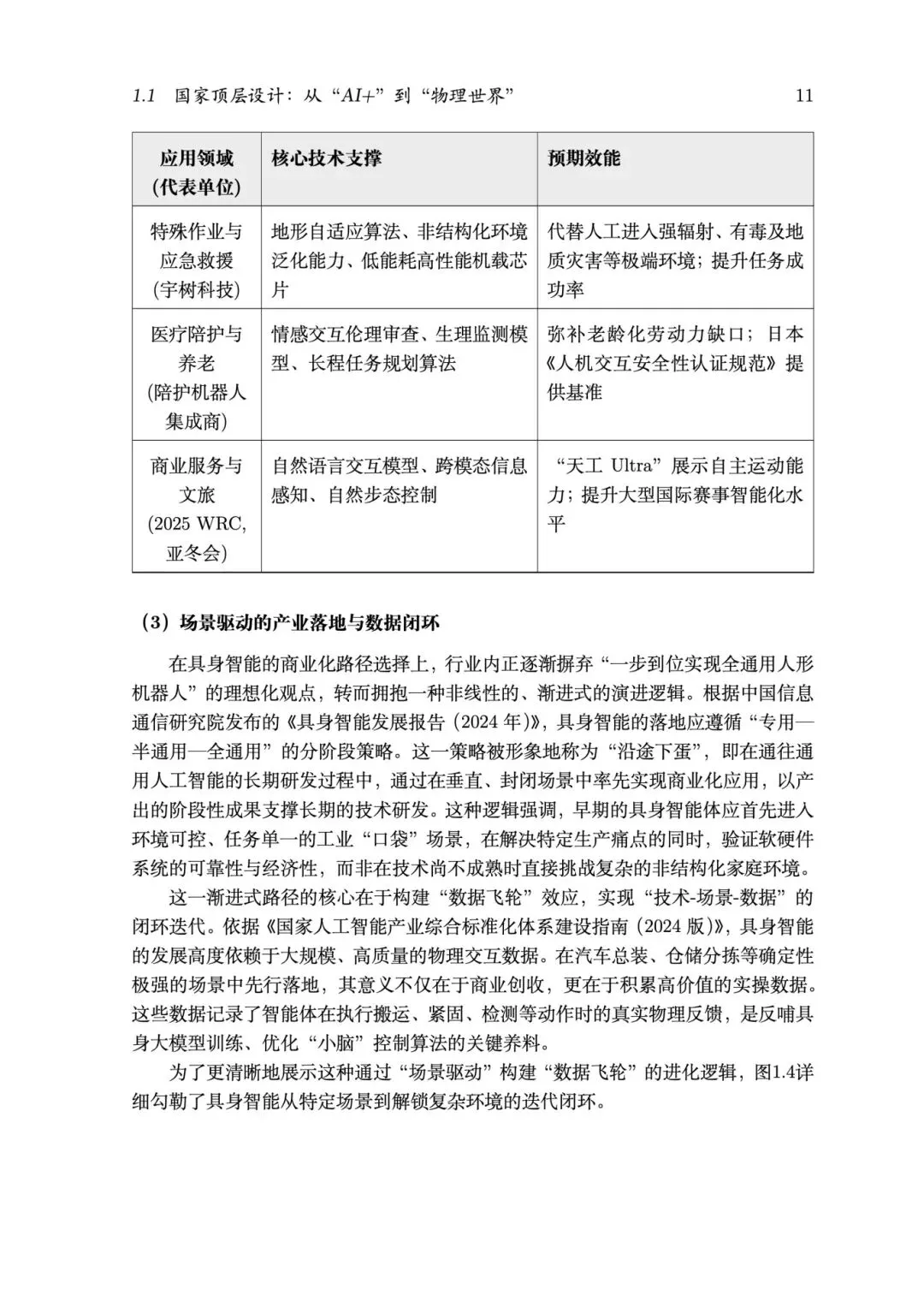
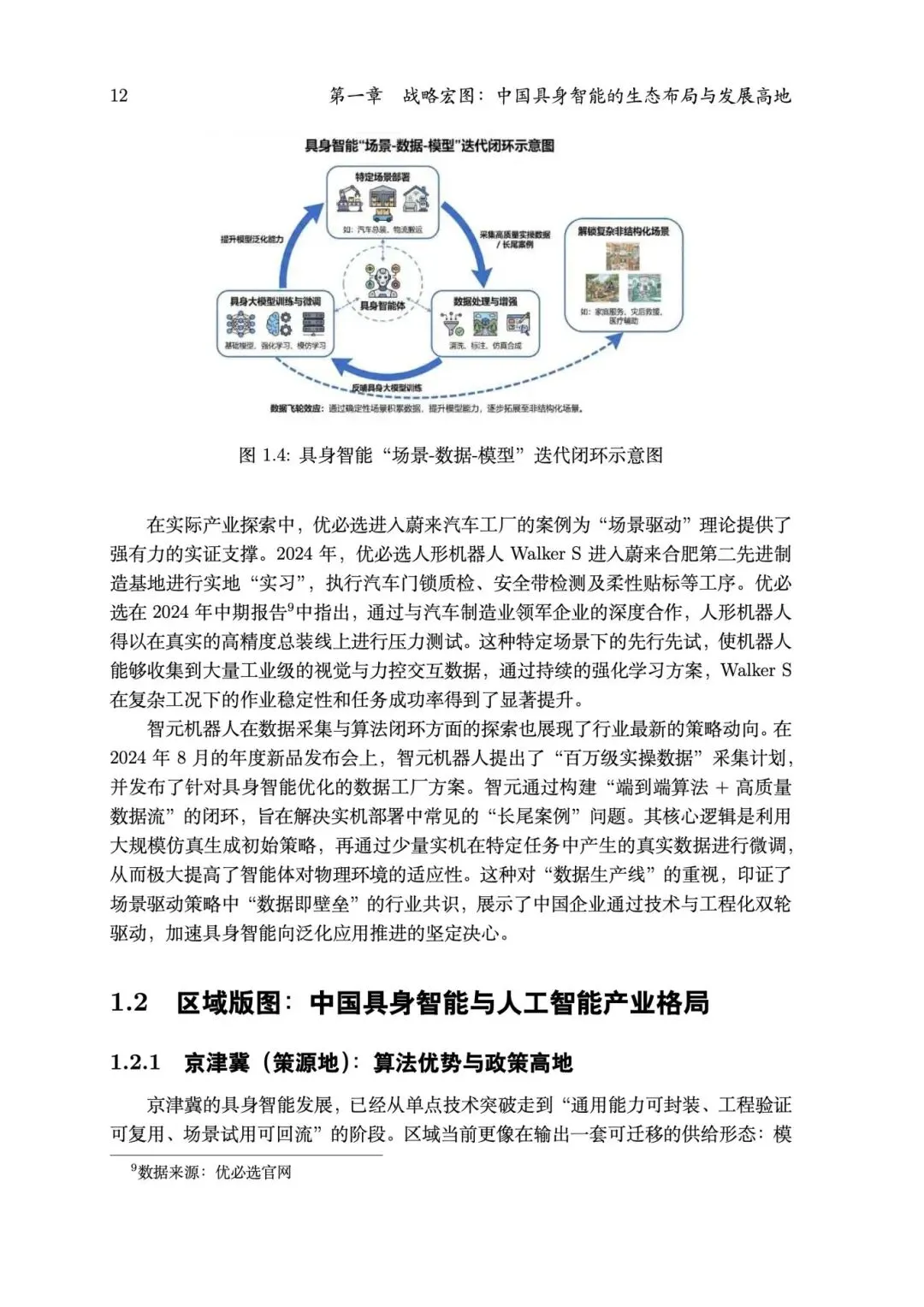
国家顶层战略加持,具身智能成为核心未来产业。2025 年《政府工作报告》明确大力发展具身智能与智能机器人,叠加《人形机器人创新发展指导意见》等政策,形成阶梯式发展目标。该技术依托 “感知 - 决策 - 行动” 闭环,融合多领域技术,既能对冲国内劳动年龄人口下降带来的制造业用工缺口,也是我国从 “世界工厂” 向智造强国转型的核心抓手,政策从标准、资金、场景多维度全面护航。 国内形成差异化区域产业格局,各集群分工明确。京津冀侧重算法、通用能力与标准评测,是技术策源地;长三角聚焦芯片、精密制造与系统集成,主打工程化落地;珠三角依托消费电子产业链,成为本体量产与硬件配套中心。合肥主攻视听觉感知、成都深耕算法软件、山西发力矿山特种机器人,中西部城市依托本地产业走出差异化突围路线。 技术范式完成迭代,三大模块构成核心技术闭环。具身智能实现从 “离身 AI” 到物理交互 AI 的范式升级,核心分为感知、决策、执行三大板块:感知依靠多模态传感器采集环境数据;决策依托 VLA 视觉 - 语言 - 动作大模型完成任务规划;执行通过灵巧手、运动控制系统实现物理动作。Sim2Real 仿真迁移技术破解训练难题,成为行业通用核心能力。 落地场景丰富多元,工业与特种领域率先规模化。目前具身智能已广泛应用于工业制造、商业物流、电网巡检、井下作业、医疗陪护等场景。在汽车、3C 制造领域实现柔性装配、质检自动化;在矿山、特高压等高危环境替代人工作业,大幅提升安全系数;家庭、文旅、康复等场景处于试点阶段,整体遵循 “专用场景先行、通用场景渐进” 的落地逻辑。 行业现存多重挑战,未来四大发展方向清晰。当前行业面临高质量数据稀缺、核心硬件国产化不足、多机协同、微纳作业等 “四极” 应用难题,同时存在安全与伦理风险。未来行业将走向通用具身大模型标准化、硬件接口模块化、云边端算力协同,同时建立完善的法律与伦理规范,实现人机安全共生,2030 年前后市场规模有望突破 4000 亿元。

报告正文
完整版报告已上传至星球,扫码加入星球查看完整报告

加入星球,获取30000+完整报告集
— 每天进步一点点 —
报告内容来源于网络,报告版权归原撰写发布机构所有
如有侵权,请联系我们删除
⬇️点击阅读原文,获取报告