


前言
当方向盘开始学会思考,人类最深的焦虑反而不来自于机器会不会开,而是来自于——它到底在想什么?
《2026智慧出行交互体验设计白皮书》以“人-车-环境”为核心,将智慧出行的交互体验设计拆解为九大趋势。
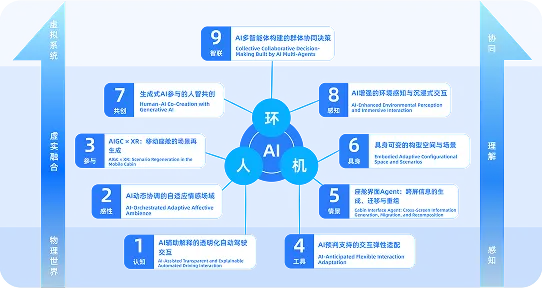
从最底层出发,用“AI辅助解释的透明化自动驾驶交互”解决人车之间的认知隔阂,让每一次感知、每一个决策、每一次交接都能被理解。
向中层延伸,以"AI动态协调的自适应情感场域"与"移动座舱的场景再生成",构建能感知情绪、主动适配的座舱体验;以"AI预判支持的交互弹性适配""跨屏信息的生成、迁移与重组""具身可变的构型空间与场景",重塑信息与空间的流动关系。
最终,经由"AI增强的环境感知与沉浸式交互"和"生成式AI参与的人智共创",最终汇入"AI多智能体构建的群体协同决策"——让单车的智能融入群体的智慧。
本系列将依次展开这九大趋势。今日聚焦趋势1:AI辅助解释的透明化自动驾驶交互。
趋势概述
自动驾驶系统正在从"执行者"转变为"协作者"——它不再只是听从指令完成操作,而是需要与人类驾驶者共同判断、彼此配合。然而,这一转变面临一个根本性障碍:系统的内部状态、决策逻辑与行为意图,对用户而言是"不可见"且"不可解"的黑箱。
这正是本趋势要解决的核心问题——认知不透明。
这一趋势沿三个递进维度展开:先让用户看见系统在想什么,再让用户看清系统在什么情况下会撑不住,最后让用户知道什么时候该接手以及如何接手。

状态意图可见
让系统不再沉默。它看到了什么、认出了什么、打算做什么,都应该被用户一眼看懂。
系统需要以低门槛、低歧义的方式持续表达几项核心信息:当前由谁控制、系统处于什么模式、感知到了哪些目标、接下来准备采取什么行动。这些信息一旦被转化为用户可快速读取的可视化语言,就能有效降低模式混淆,让系统的行为变得可预期。
学术领域目前聚焦于如何设计这种可视化语言:研究者正探索基于认知负荷模型的自适应信息呈现策略,以及结合眼动追踪与注意力预测的意图表达触发机制。例如,一项真实道路环境下的Wizard-of-Oz实验,通过在挡风玻璃上以AR方式呈现目标检测与系统反馈,验证了可视化感知结果能显著提升乘客对自动驾驶的理解与接受度。
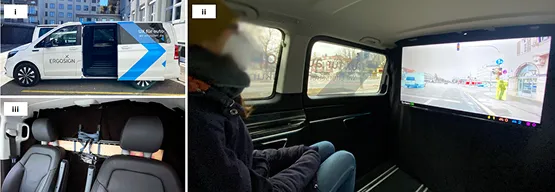
图1 Wizard-of-Oz实验环境实景
图片来源:论文《Prototyping Autonomous Vehicle Windshields with AR and Real-Time Object Detection Visualization: An On-Road Wizard-of-Oz Study》
在行业实践中,特斯拉FSD可视化界面是这条路径的早期标杆。车道线、交通参与者、红绿灯,甚至系统注意力的聚焦区域,都被实时渲染在中控屏上。驾驶员只需扫一眼,就能判断FSD对环境的理解是否与自己一致——当屏幕上的世界与你眼中的世界高度重合,信任就有了最直观的锚点。
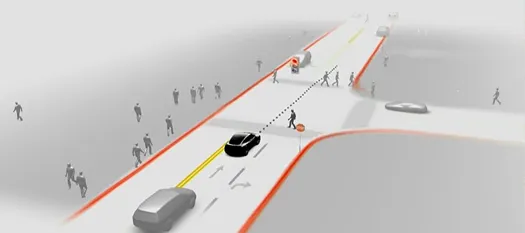
图2 特斯拉 FSD Beta 可视化页面
图片来源:博客《All Tesla FSD Visualizations and What They Mean》
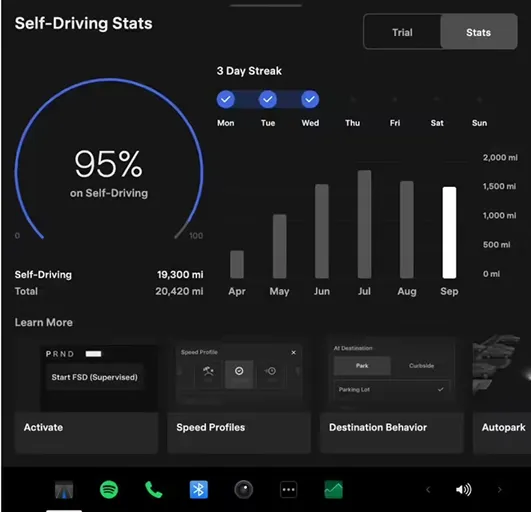
图3 特斯拉26年春季更新的FSD统计页面图片来源:IT之家
蔚来Aquila超感视界App则在此基础上更进一步,将可视化升级为"可交互的驾驶沙盘"。基于NT2.0平台,中控屏能够展示360°、最远200米范围内的全部感知目标,支持视角的自由缩放与旋转——用户不再是被动观看,而是可以主动探查系统的感知边界。

图4 蔚来Aquila超感视界界面图片来源:蔚来官网
更特别的设计是,用户甚至可以在屏幕上选中目标车位,直接发起泊车。这一功能让可视化从"告知"走向了"协同",用户对智驾能力的认知也因此被彻底具象化。
边界风险判读
让系统承认自己的局限。它不是万能的,但它必须让用户清楚地知道,自己在什么时候不再是万能的。
自动驾驶交互正从"可用/不可用"的二元告知,发展为对能力边界、场景适用性与风险等级的动态解释。系统需要持续回答用户的隐忧:当前运行条件是否稳定?是否正在接近ODD边界?哪些判断存在不确定性?什么时候需要重新集中注意力?
学术领域当前的研究重点,正围绕ODD边界的动态可视化方法、不确定性表达的语言与图形设计,以及基于情境意识理论的风险前置提示策略展开。部分研究提出"风险地图"概念,将系统判断的不确定性区域以空间化方式直观呈现给用户,让抽象的"可能出错"变成具体可见的"哪里可能出错"。
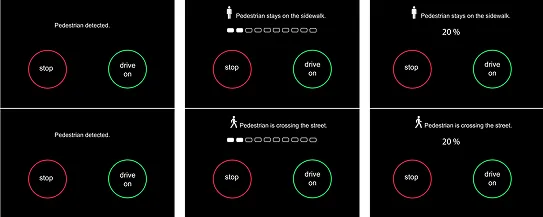
图5 置信HMI研究实验最终效果方案
图片来源:论文《“Can you rely on me?” Evaluating a Confidence HMI for Cooperative, Automated Driving》
在行业前沿中,理想汽车的高速智能驾驶展示了系统在能力范围内的主动克制。当目标车道是实线、宽度不足或有其他车辆侵入时,辅助变道不会强行执行,而是自动进入等待状态,将车道边界与变道风险转化为可理解的前置提示。
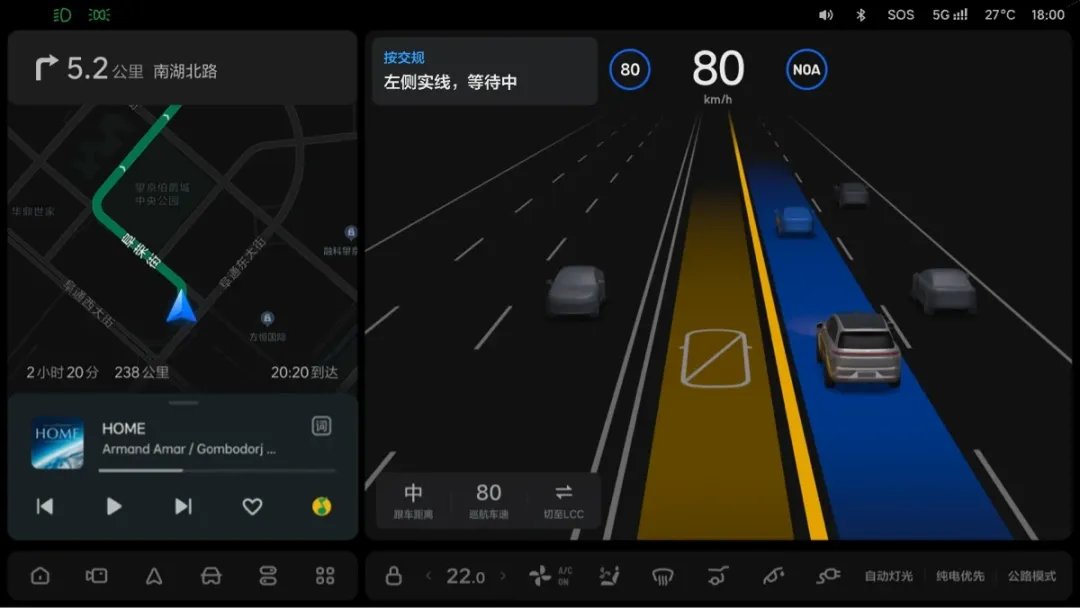
图6 理想汽车等待状态页面
图片来源:理想汽车官网
奔驰Drive Pilot则展示了系统在能力极限处的责任移交。作为量产L3级系统的先行者,它用灯带语言定义了风险分级的经典范式:黄色灯带表示“系统仍在运行,但驾驶员很快需要接管”,构成温和的预备信号;红色灯带配合仪表急促提示与“Take back control of wheel”,则是边界已被触发、风险升级的强制接管。这一色彩编码体系,将抽象的系统能力边界翻译成了一种直觉性视觉语言——看见黄色,知道要警觉;看见红色,知道必须行动。


图7 奔驰Drive Pilot方向盘灯带示意图
图片来源:奔驰汽车官网
接管信任协同
让系统把方向盘交还给人,而不是扔回给人。
接管交互正从“临界时刻的单次警报”演进为贯穿自动驾驶全过程的协同准备机制。理想的接管,应该在事前解释风险来源、介入必要性与剩余时间窗口,在事中提供明确的操作优先级提示,在事后帮助用户快速恢复情境认知。
随着多模态提醒、语音代理与自适应解释机制的发展,接管将不再是控制权交还,而是一种可被理解、配合与信任的人车协同行为。当前学术前沿关注接管请求的解释性设计,旨在结构化地表达三个关键信息:“为何需要接管”、“风险来自哪里”和“用户优先操作是什么”。此外,基于驾驶员状态监测的自适应接管策略(如调整提醒强度、提前预警)也成为热点。

图8 多模态接管预警实验环境实景
图片来源:论文《Development of Warning Methods for Planned and Unplanned Takeover Requests in a Simulated Automated Driving Vehicle》
行业前沿中,小鹏G9的城市NGP定义了四级交互提示体系,把"必须接管"从一个瞬间事件拉伸为一条可感知的预警梯度。从轻提示到强警告,从仪表红屏、紧急语音到安全带震动,驾驶员在系统退出前获得的是逐步强化的预判信号,而非突如其来的恐慌指令。

图9 小鹏分级交互提示界面
图片来源:小鹏官网
理想汽车则在此基础上配置驾驶员注意力监测系统(DMS)。一旦发现注意力分散,会通过文字、语音与中控屏状态图标主动提醒。

图10 理想驾驶员监测提示界面及图示标注
图片来源:理想官网
总结
综合上述三个子趋势,透明化与可解释的自动驾驶交互的核心在于将自动驾驶从“后台黑箱”转化为“前台可协作对象”。这不是简单的信息堆砌,而是通过AI辅助解释能力,在状态意图、边界风险与接管信任三个关键维度上,帮助用户建立正确的心智模型。
未来的自动驾驶交互设计,应致力于让系统的每一次感知、每一个决策、每一次交接都能被用户自然理解与合理预期。
当用户不再需要猜测“系统在想什么”,而是能像与人类协作者一样顺畅沟通时,人车关系才能真正从“主从控制”走向“协同共驾”。这不仅是技术能力的提升,更是智慧出行体验设计从“可用”迈向“可信”的关键一跃。
参考文献
[1] Lukas A. Flohr, Joseph Sebastian Valiyaveettil, Antonio Krüger, and Dieter P. Wallach. 2023. Prototyping Autonomous Vehicle Windshields with AR and Real-Time Object Detection Visualization: An On-Road Wizard-of-Oz Study. In Proceedings of the 2023 ACM Designing Interactive Systems Conference (DIS '23). Association for Computing Machinery, New York, NY, USA, 2123–2137. https://doi.org/10.1145/3563657.3596051
[2] Jakob Benedikt Peintner, Carina Manger, and Andreas Riener. 2022. “Can you rely on me?” Evaluating a Confidence HMI for Cooperative, Automated Driving. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI '22). Association for Computing Machinery, New York, NY, USA, 340–348. https://doi.org/10.1145/3543174.3546976
[3] Sara Hong, Jooyoung Maeng, Hee Jeong Kim, and Ji Hyun Yang. 2022. Development of Warning Methods for Planned and Unplanned Takeover Requests in a Simulated Automated Driving Vehicle. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI '22). Association for Computing Machinery, New York, NY, USA, 65–74. https://doi.org/10.1145/3543174.3545999

