



“机器视觉行业深度研究报告(一):从二维识别到三维重构,3D视觉正从“可选配置”走向“刚需标配””由华创证券发布。完整版PDF电子版报告下载方式见文末。
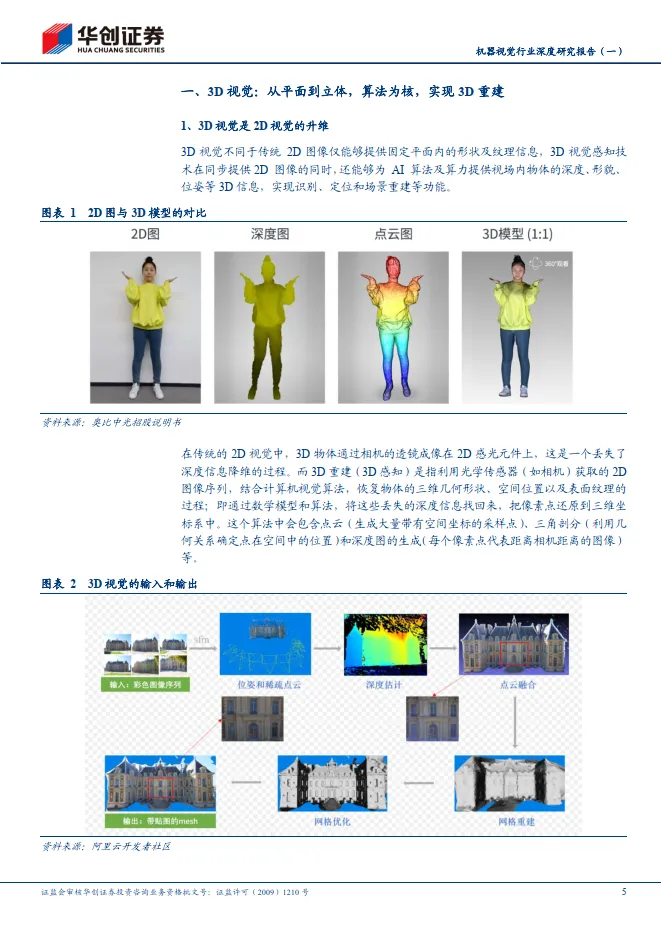
从平面到立体,通过计算实现3D 重建。3D 视觉不同于传统2D 图像仅能够提供固定平面内的形状及纹理信息,3D 视觉感知技术在同步提供2D 图像的同时,还能够为AI 算法及算力提供视场内物体的深度、形貌、位姿等3D 信息,实现识别、定位和场景重建等功能。3D 重建(3D 感知)是指利用光学传感器(如相机)获取的2D 图像序列,结合计算机视觉算法,恢复物体的三维几何形状、空间位置以及表面纹理的过程。
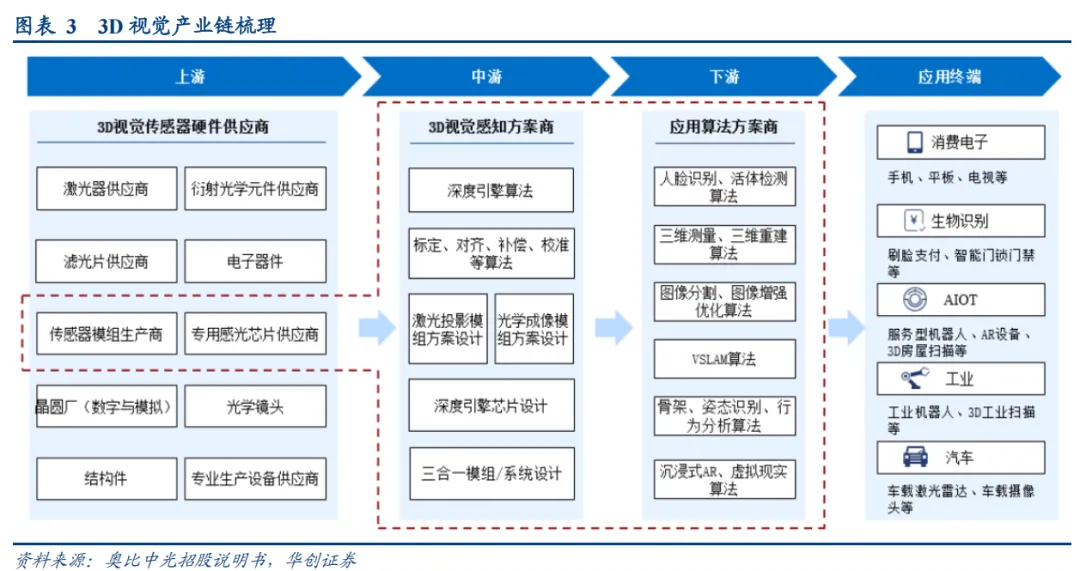
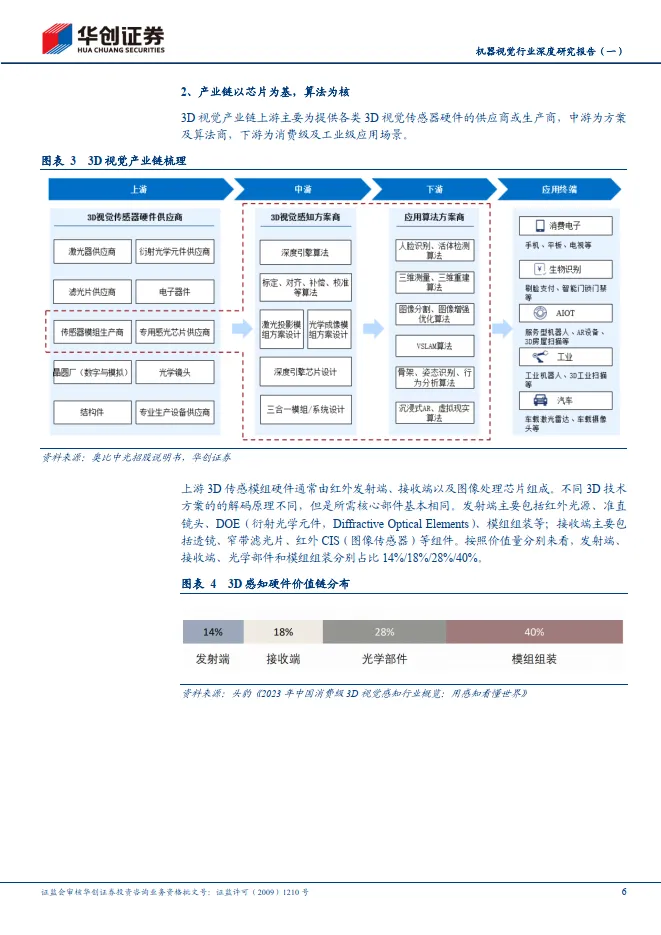
产业链以芯片为基、算法为核。3D 视觉产业链上游主要为提供各类3D 视觉传感器硬件的供应商或生产商,中游为方案及算法商,下游为消费级及工业级应用场景。产业链中游方案主要基于深度引擎算法结合应用进行各类3D 视觉传感器的方案设计。由于3D 视觉最终是通过计算得到的,因为3D 感知企业不仅需要掌握核心芯片、光学、算法等底层核心能力还需要具备全领域技术路线布局及相关产品开发的能力。
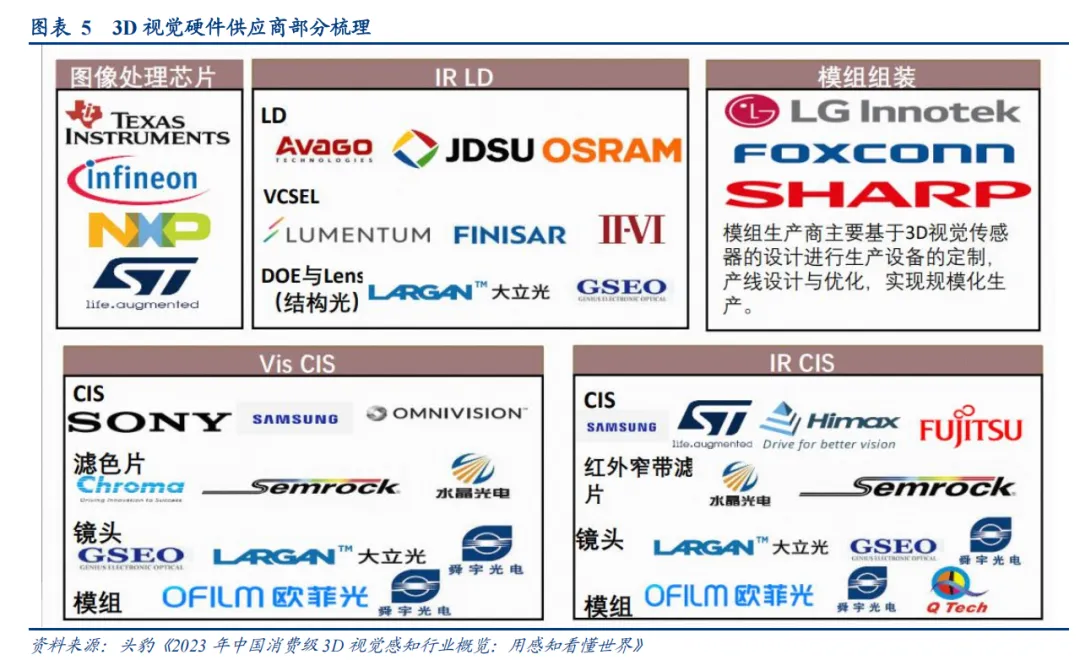
上游3D 传感模组硬件通常由红外发射端、接收端以及图像处理芯片组成。不同3D 技术方案的的解码原理不同,但是所需核心部件基本相同。发射端主要包括红外光源、准直镜头、DOE(衍射光学元件,Diffractive Optical Elements)、模组组装等;接收端主要包括透镜、窄带滤光片、红外CIS(图像传感器)等组件。按照价值量分别来看,发射端、接收端、光学部件和模组组装分别占比14%/18%/28%/40%。
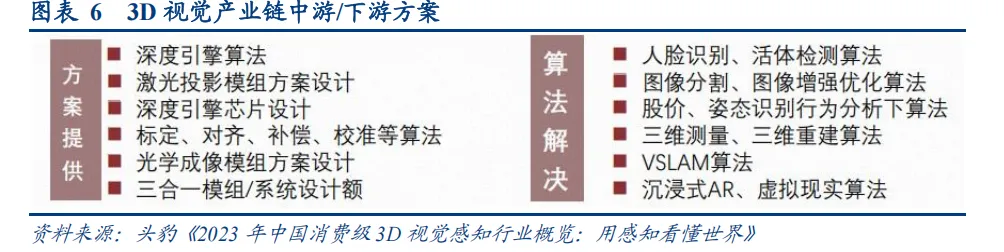
芯片为基,算法为核。3D 视觉产业链中游为3D 视觉感知方案商,产业链中游方案主要基于深度引擎算法结合应用进行各类3D 视觉传感器的方案设计。由于3D 视觉最终是通过计算得到的,因为3D 感知企业不仅需要掌握核心芯片、光学、算法等底层核心能力,还需要具备结构光、iToF(间接飞行时间技术)、双目、dToF(直接飞行时间技术)、Lidar (激光雷达)、工业三维测量等全领域技术路线布局及相关产品开发的能力。
产业链下游主要为根据终端的各类应用场景开发各类应用算法的应用算法方案。目前已具备一定商业应用的算法包括:人脸识别、活体检测算法,三维测量、三维重建算法,图像分割、图像增强优化算法,VSLAM 算法,骨架、姿态识别、行为分析算法,沉浸式AR、虚拟现实算法等。随着3D 视觉感知应用场景的丰富,会有更多的应用算法商业化。产业应用终端主要是基于3D 视觉感知技术的各类应用场景客户。
幻影视界整理分享报告原文节选如下:


 戳“阅读原文”下载报告。
戳“阅读原文”下载报告。