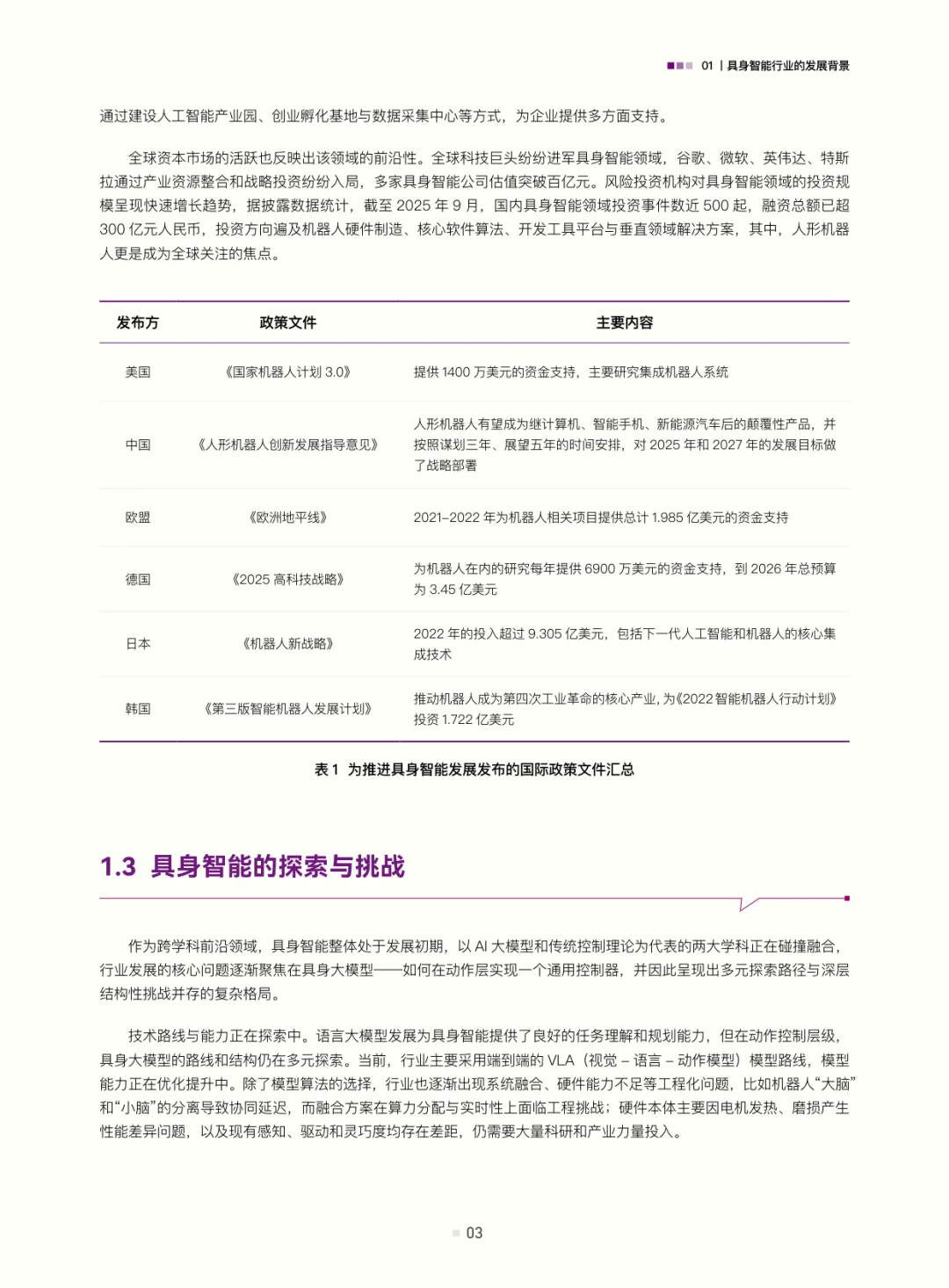
2026年3月,国际先进技术应用推进中心(深圳)发布《具身智能数据行业研究白皮书》,围绕具身智能这一人工智能与机器人技术交叉的前沿领域展开系统研究。具身智能以“智能体需具物理形态并与环境交互”为核心,被视为实现通用人工智能的重要路径,正成为全球科技竞争焦点——美、欧、中及日韩等均通过政策将其纳入战略布局,全球资本市场与科技巨头加速布局,我国更将其写入2025年政府工作报告。
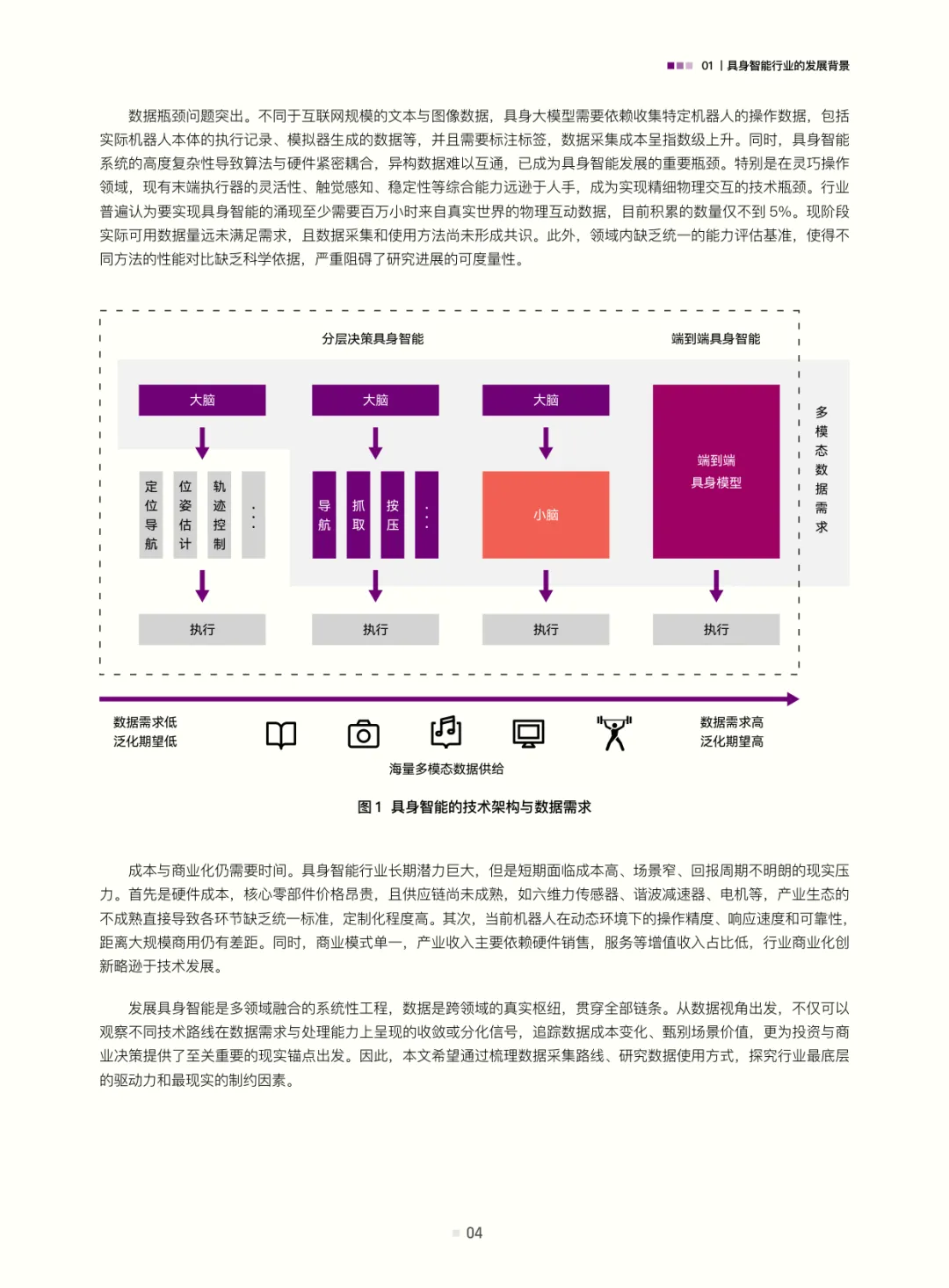
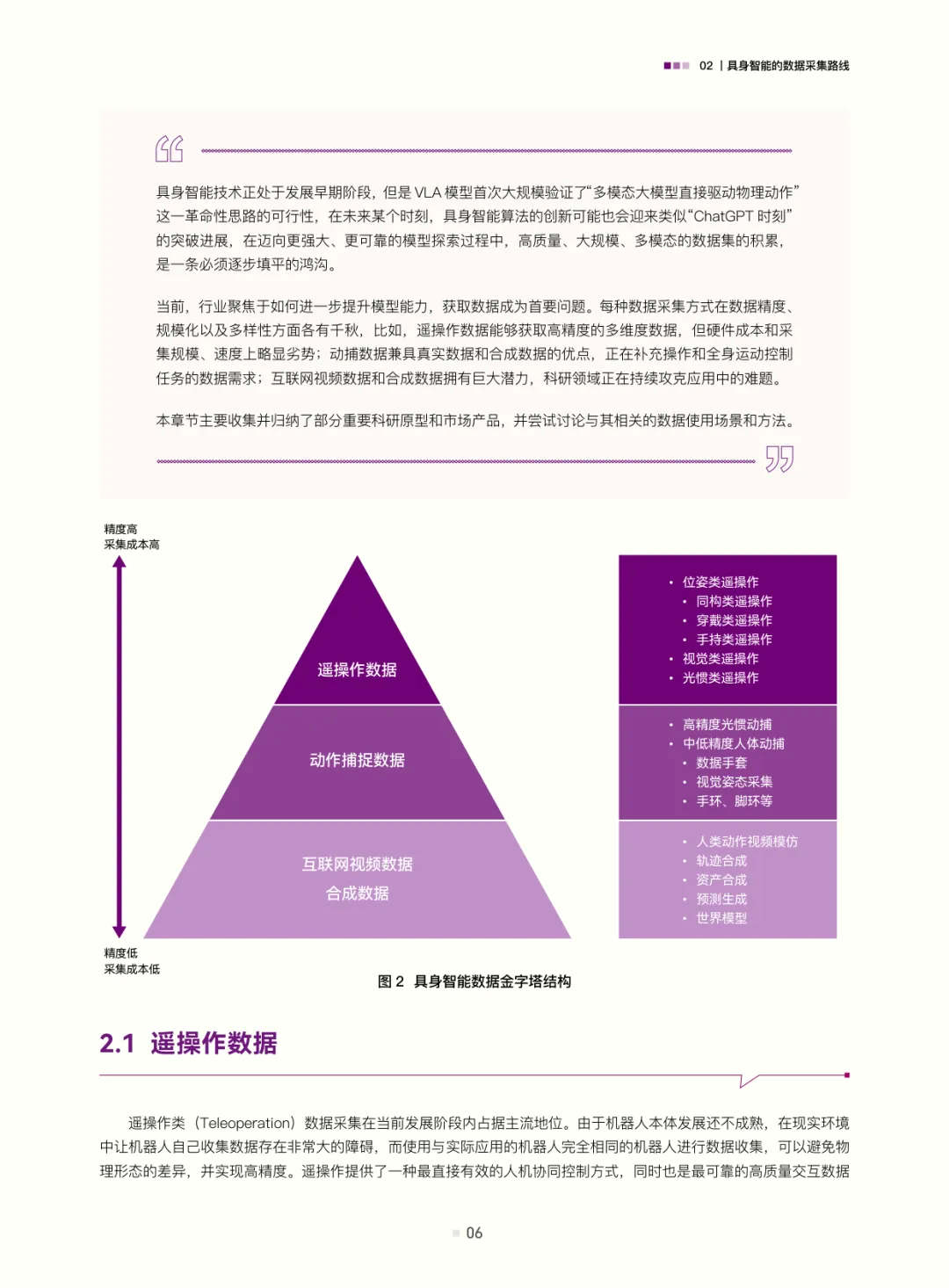
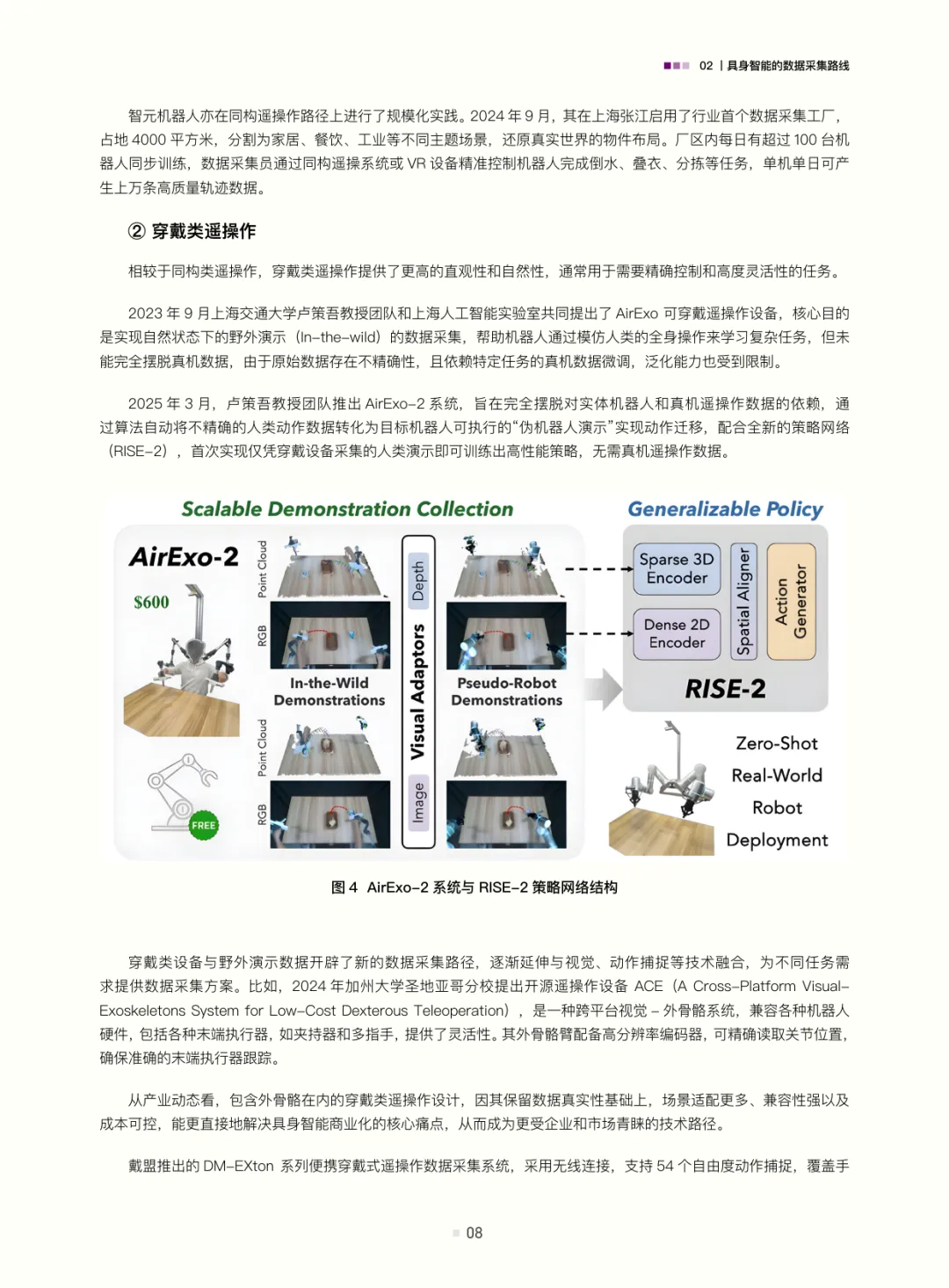
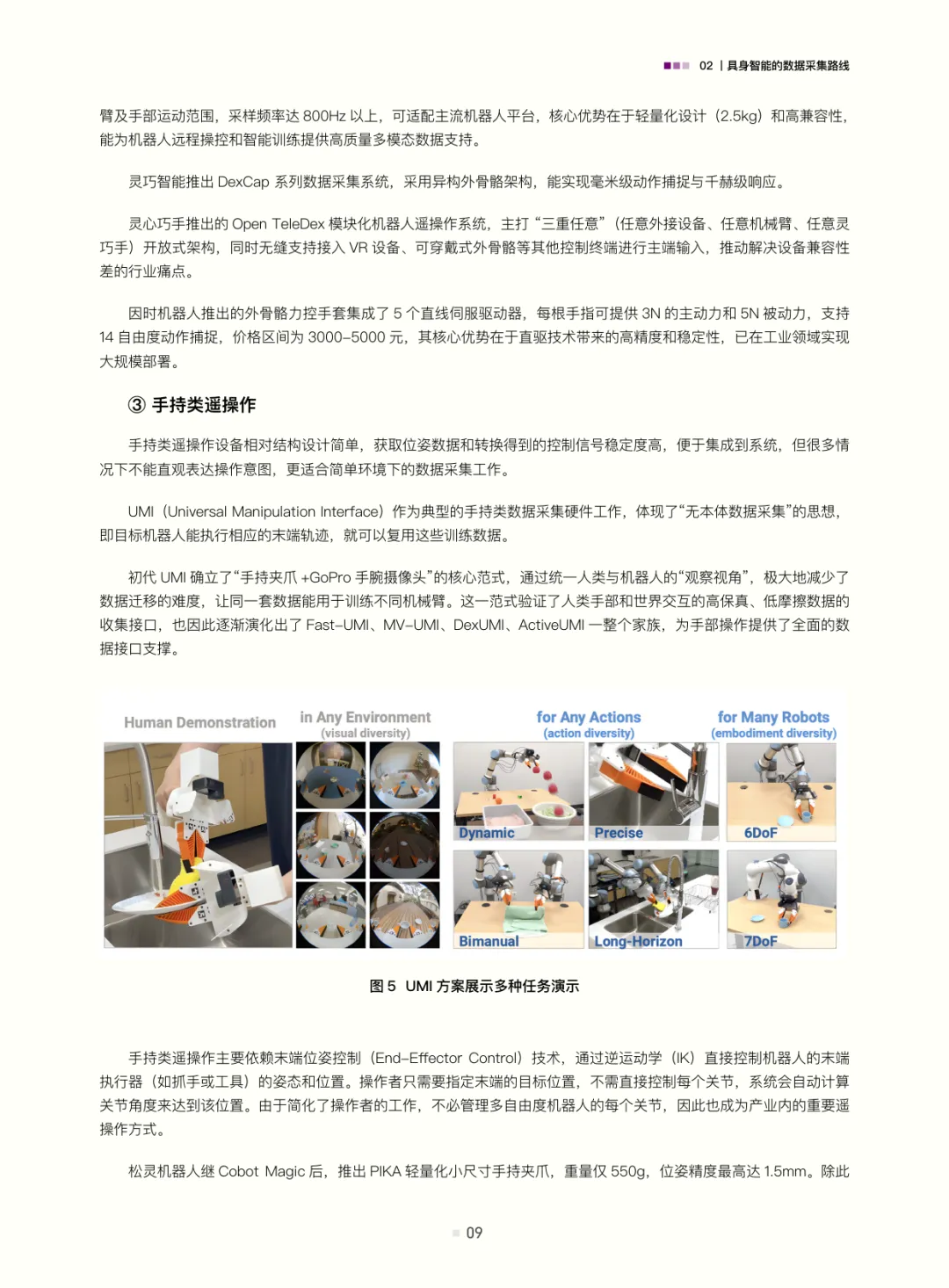
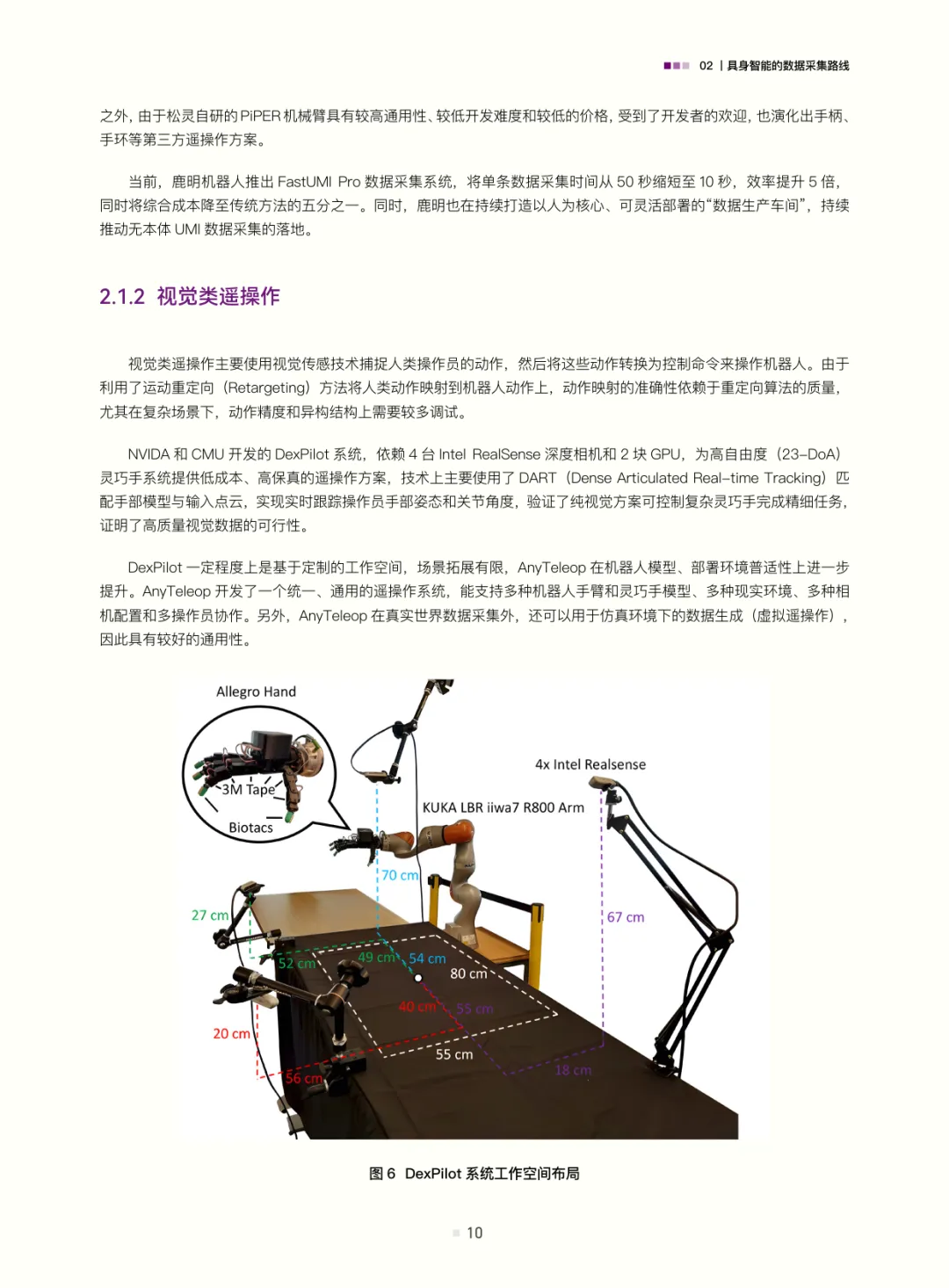
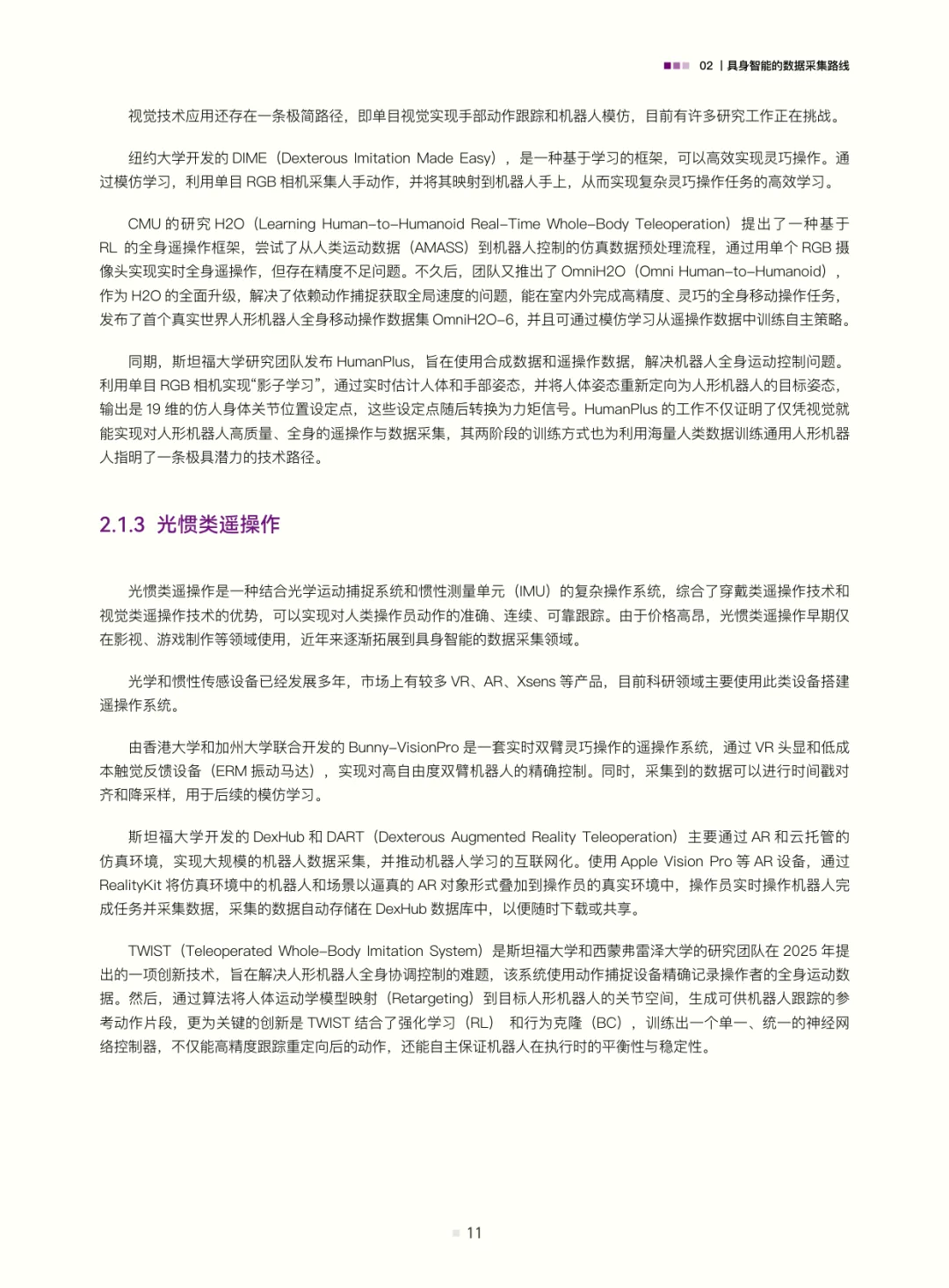
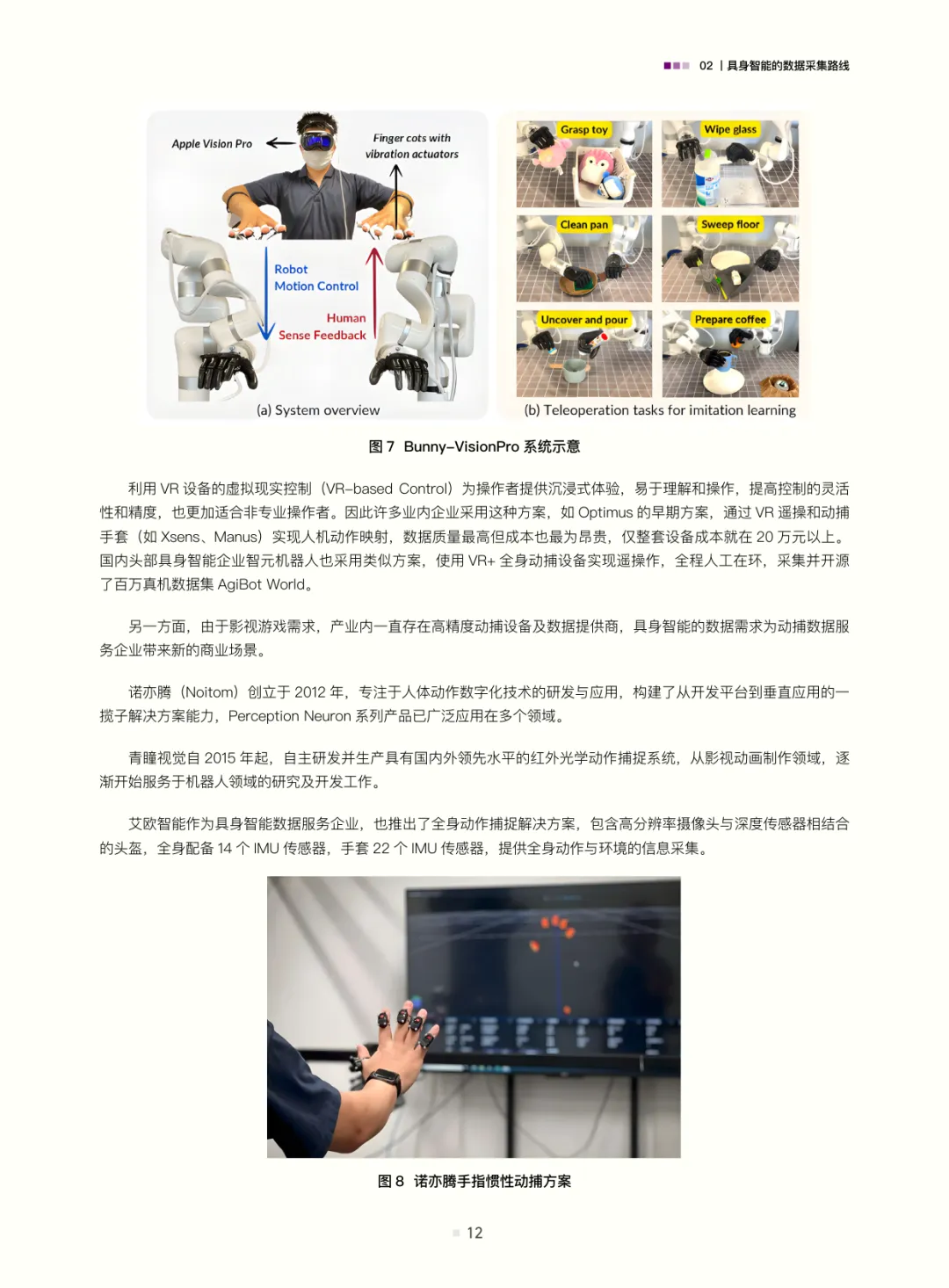
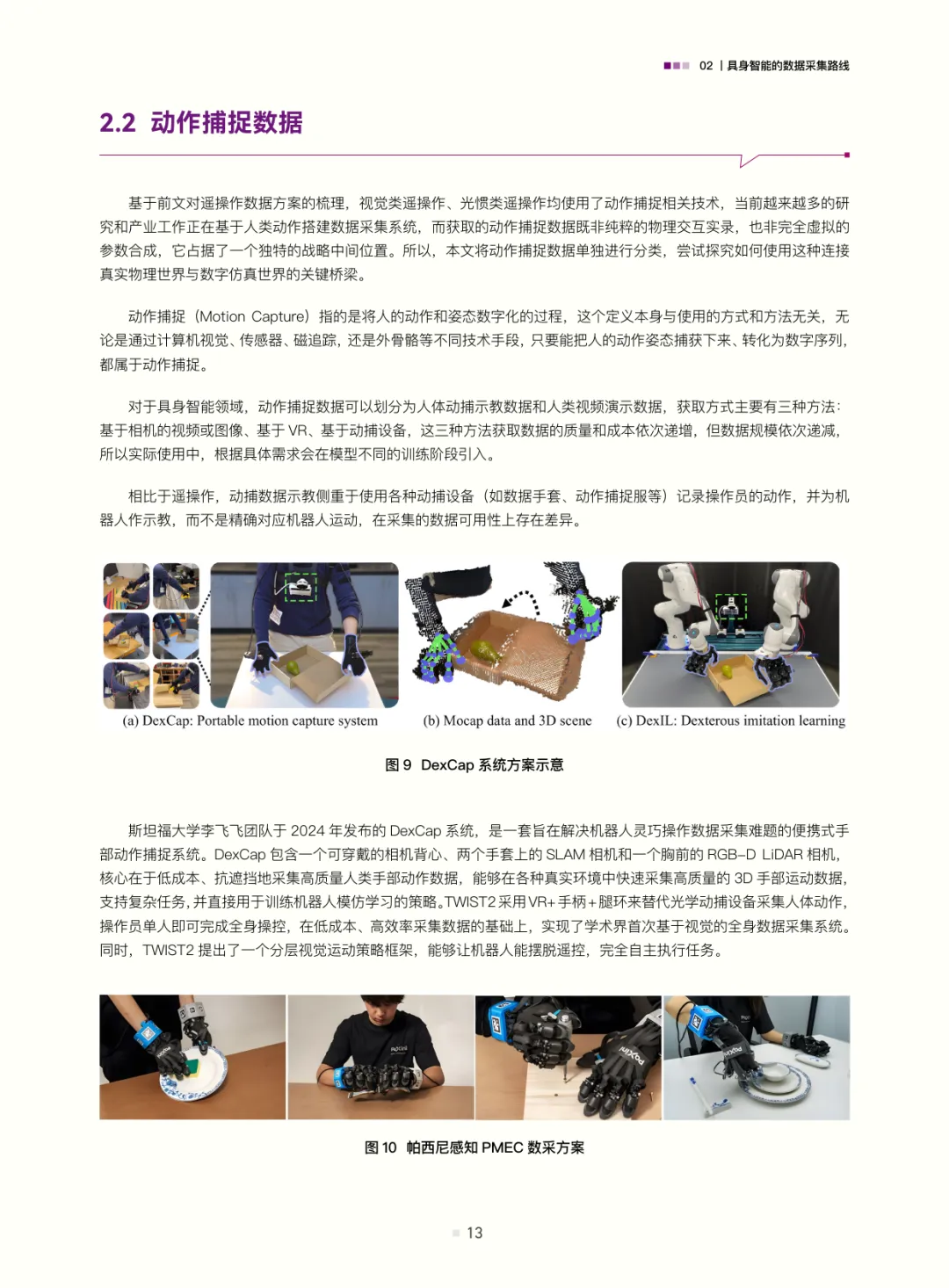
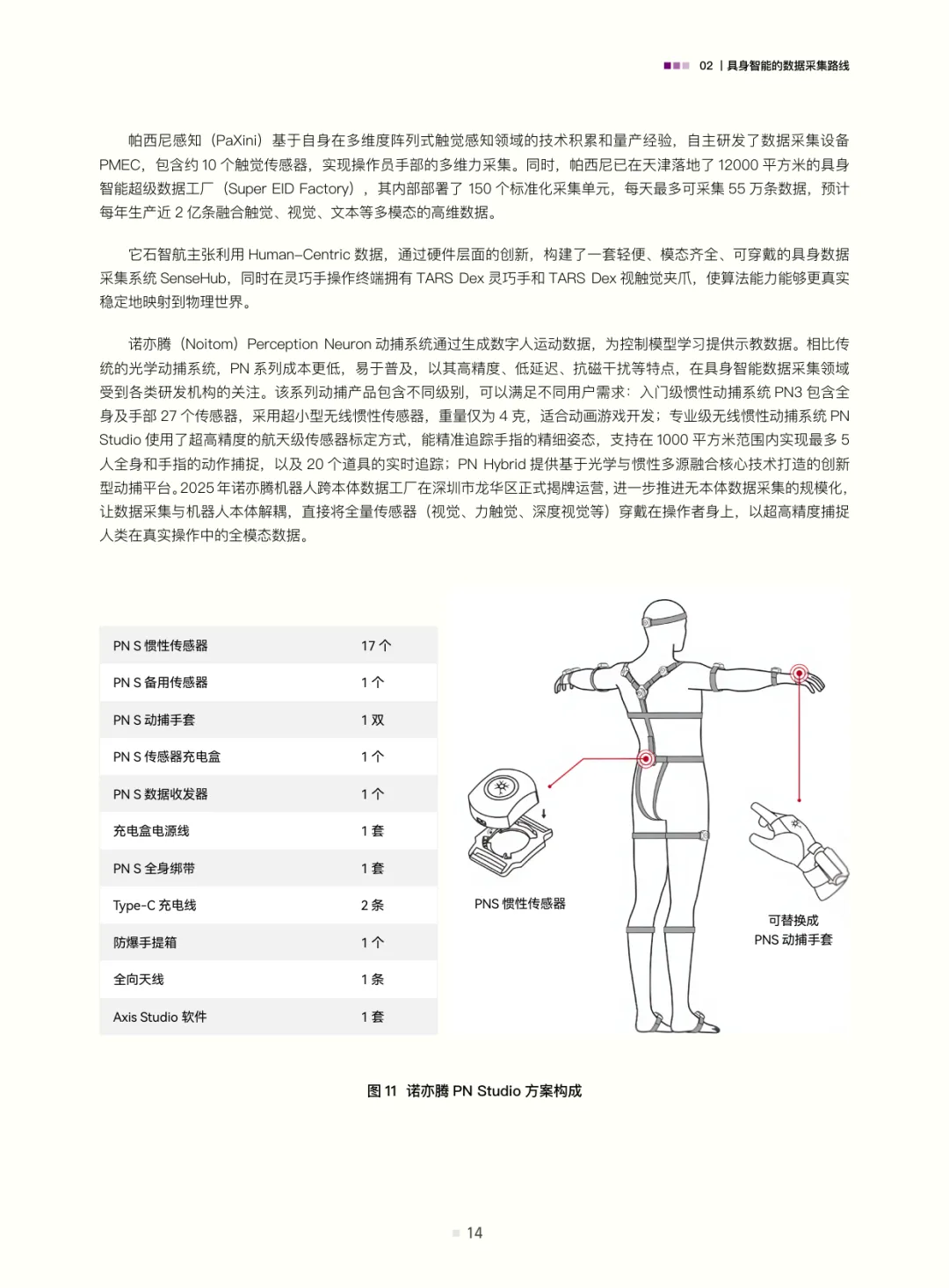
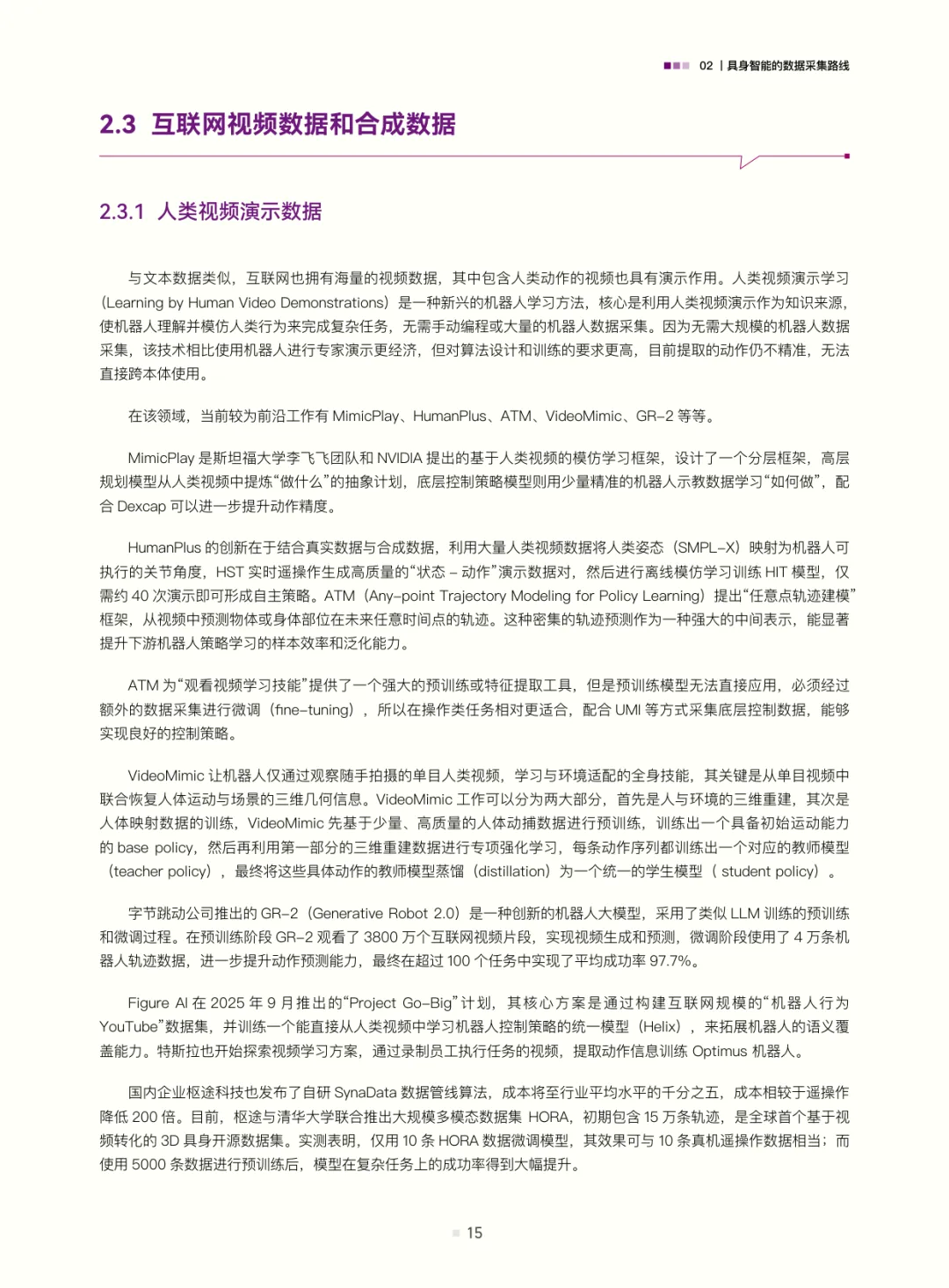
白皮书梳理了具身智能的数据采集路线:遥操作数据(含位姿类、视觉类、光惯类,是当前高质量交互数据的主流来源)、动作捕捉数据(连接真实与数字仿真的关键桥梁)、互联网视频与合成数据(潜力大但需攻克应用难题);结合自动驾驶数据发展经验(从依赖高精地图的静态数据到仿真与真机融合的动态体系,揭示“仿真优先、真机验证”及数据异构融合的重要性),评估了具身智能数据发展现状——真机遥操作数据是“黄金标准”但泛化与规模受限,无本体数据采集(如UMI、轻量化动作捕捉、人类视频)可破“成本-规模-多样性”三角,仿真系统是必要非完美工具(需解决Sim2Real gap与复杂交互模拟难题)。
在此基础上,白皮书从数据视角推演渐进式商业化道路:第一阶段以少量数据构建原型与工程环境执行能力(聚焦可控场景验证技术可行性);第二阶段聚焦场景、以大量数据驱动算法迭代与标准化(需政府与企业共建训练场,破解数据孤岛与标准缺失);第三阶段靠海量数据实现高阶功能闭环拓展(依托“云-边-端”协同,走向“智能即服务”模式)。
最后,白皮书总结机会与风险:机会包括感知技术创新(多模态数据入口)、数据采集与治理(标准化底层基建)、垂直场景解决方案(加速落地)、真机失败数据(提升模型鲁棒性)、世界模型(通往通用智能的潜在路径)及数据路线多元探索;风险涉及技术架构迭代、数据可用性验证投入、数据安全与伦理监管、产品安全保障缺失、生态与标准缺失及商业化不及预期。附录还整理了BridgeData、Open X-Embodiment、Human3.6M等常见操作与运动数据集,为行业提供参考。
白皮书指出,具身智能是人工智能从数字“认知智能”向物理“行动智能”的跨越,其发展是五年至二十年的渐进式演进,数据作为核心要素,需构建多路径融合的基础设施与闭环体系,最终胜者将是深刻理解产业节奏、能应对复杂风险并持续迭代的企业。