研究小组:孟德逸凡、聂筱萱、
高郡彤、钟浩然、曹咏熙
指导教师:李宇
所在年级:五年级
研究学科:信息技术、科学、数学
一、研究背景
(一)研究原因
在日常的课堂学习中,我们接触到了不同学科的知识:科学课上探索摩擦力的奥秘,信息科技课上体验乐高搭建与图形化编程;数学课上学习数据收集与分析,劳动课上锻炼动手实践的能力。这些知识看似分散,却让我们萌生了一个想法:如果把这些学科知识融合起来,能不能设计出一个能解决生活实际问题的小装置?
我们发现校园里散落的塑料瓶、纸团等垃圾,环卫工人和老师捡拾起来费时又费力,传统的垃圾夹、扫帚等工具还存在抓取不灵活的问题。于是我们想到,用信息科技课的乐高搭建和编程知识,结合科学课的摩擦力原理,再用数学课的数据分析方法,制作一个能自动抓取垃圾的“清洁小帮手”。带着这个想法,我们成立了研究小组,开展本次跨学科研究性学习。聂筱萱
(二)研究意义
1. 知识融合与应用:将信息科技、科学、数学、工程设计等学科知识融合,通过制作“清洁小帮手”,把课堂上学到的理论知识转化为实际应用,更直观地理解各学科知识之间的关联。
2. 实践与解决问题能力:在动手设计、搭建、编程和实验的过程中,学会查找资料、分析问题、寻找解决方案,提升动手实践和解决实际问题的能力。
3. 团队协作与沟通:小组分工合作完成研究任务,学会在团队中发挥自身优势,有效沟通、互帮互助,增强团队合作意识和沟通能力。
4. 兴趣培养与环保理念:激发对STEAM学科的学习兴趣和科技创新的探索欲望,同时以垃圾清理为切入点,加深对环保的理解,树立用科技助力环保的责任意识。
(三)研究目标
1. 设计并制作一款基于乐高Prime科创套装的“清洁小帮手”机械抓手,实现稳定抓取、平稳放下校园常见垃圾的功能。
2. 在研究过程中,融会贯通信息科技、科学、数学等学科知识,理解摩擦力与抓取效果的关联,掌握基础图形化编程和实验数据分析方法。
3. 通过跨学科实践,提升小组的创新思维、动手操作、数据分析和团队协作能力,体会“做中学、用中学”的学习乐趣。
4. 让制作的“清洁小帮手”能应用于校园垃圾清理,用实际成果为校园环保贡献力量。
二、 研究思路与方法
(一)研究思路
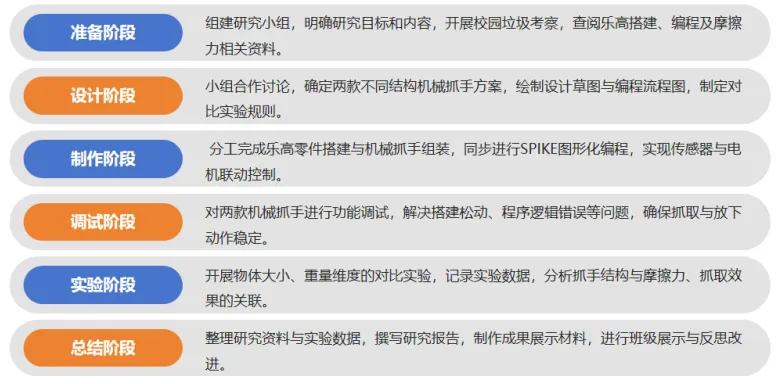
本次研究性学习按照准备阶段、设计阶段、制作阶段、实验阶段、总结阶段五个核心阶段推进,从发现问题、明确目标,到动手实践、实验探究,再到总结成果、反思改进,层层递进完成整个研究过程,让每一位小组成员都全程参与、自主探究。
(二)研究方法
1. 文献调研法:上网查阅乐高机械搭建、传感器使用、图形化编程的相关资料,了解机械抓手的设计原理和摩擦力在实际生活中的应用案例。
2. 调查研究法:在校园内观察不同区域的垃圾类型,记录常见垃圾的大小、重量和形状,为“清洁小帮手”的设计和实验提供实际依据。
3. 小组讨论法:小组成员定期开展讨论,明确研究分工、确定装置设计方案、解决制作和实验中遇到的问题,共同梳理研究思路。
4. 自主实践法:根据设计方案,分工合作完成机械抓手的搭建、编程调试,亲手操作完成对比实验,在实践中积累经验、解决问题。
5. 实验对比法:设计不同维度的对比实验,测试两款不同结构机械抓手的抓取性能,收集实验数据并分析,探究影响抓取效果的关键因素。
三、小组分工
根据每位成员的兴趣和特长,我们进行了明确的小组分工,确保研究任务高效推进,同时让每个人都能发挥优势、各展所长,遇到问题时全员讨论、共同解决:
孟德逸凡:负责机械抓手的结构设计、乐高零件搭建与调试,主导解决搭建过程中的机械结构问题。
聂筱萱:负责SPIKE图形化编程、传感器与电机的联动调试,制定编程思路并完成程序编写。
高郡彤:负责校园垃圾调查、实验方案设计,记录实验数据并进行整理分析,绘制实验数据表格。
钟浩然:负责研究资料整理、实验过程记录,撰写研究性学习报告,主导研究成果的展示与讲解。
曹咏熙:负责成果展示 PPT 制作、实验过程拍照与记录、小组材料整理与归档,协助完成成果展示与汇报。
四、研究过程与成果
(一)研究过程
1. 准备阶段:组建小组,明确方向
我们首先组建了研究小组,在老师的指导下明确了本次研究的主题、目标和内容。小组成员各自分工,孟德逸凡和聂筱萱上网查阅乐高Prime科创套装的使用技巧、机械抓手设计案例,了解压力传感器和中型电机的工作原理;高郡彤在校园内进行垃圾调查,记录校园常见垃圾主要有空塑料瓶、揉皱纸团、乐高积木、果皮等,统计它们的大小和重量特点;钟浩然和曹咏熙整理所有调研资料,为后续设计阶段做好准备。
2. 设计阶段:整合知识,敲定方案
在充分调研的基础上,我们小组开展了多次讨论,整合各学科知识确定“清洁小帮手”的设计方案。结合科学课学到的摩擦力知识,我们决定设计两款不同结构的机械抓手,对比测试哪种结构的摩擦力更大、抓取效果更好;利用信息科技课的图形化编程知识,规划传感器与电机的联动逻辑,确保抓手能实现“按压感应-稳定抓取-平稳放下”的功能;结合数学课的数据分析知识,制定实验评分规则和数据记录标准。
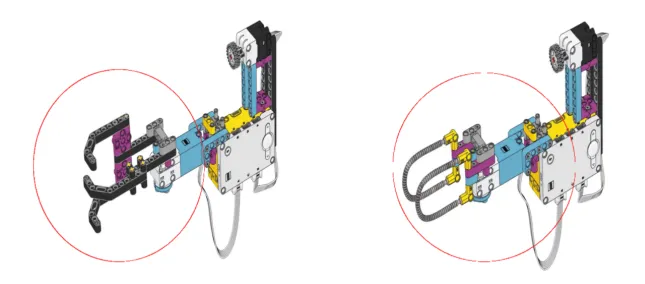
随后,我们一起画出了机械抓手的设计草图和编程流程图,明确了两款抓手的结构差异:第一款采用基础直形抓手,第二款将抓手设计为弧形并调整齿轮传动比,为后续的制作和实验奠定了基础。

3. 制作阶段:分工合作,动手实践
这是本次研究的核心环节,我们根据设计方案分工合作,开始制作“清洁小帮手”机械抓手。孟德逸凡带领大家认识乐高Prime科创套装的核心零件,讲解梁、轴、齿轮、压力传感器、中型电机的使用方法,先跟着搭建手册完成第一款基础机械抓手的搭建,过程中遇到了零件连接不牢固、电机安装不到位的问题,我们反复拆解、重新搭建,在老师的指导下终于让抓手实现灵活开合。
接着,我们按照自主设计方案搭建第二款弧形机械抓手,聂筱萱同步进行SPIKE图形化编程,明确编程核心要求:按下压力传感器主机亮起、抓手能稳定抓取物体、平稳放下物体。我们一起绘制编程思路图,梳理传感器与电机的联动逻辑,反复调试程序参数,解决了程序逻辑错误、电机转速不适配等问题,最终让两款机械抓手都能实现预设功能,真正做出了属于我们的“清洁小帮手”。

4. 实验阶段:对比测试,探究原理
为了测试两款“清洁小帮手”的抓取性能,探究影响抓取效果的关键因素,我们设计了两项对比实验,高郡彤负责实验操作和数据记录,全员参与实验分析。
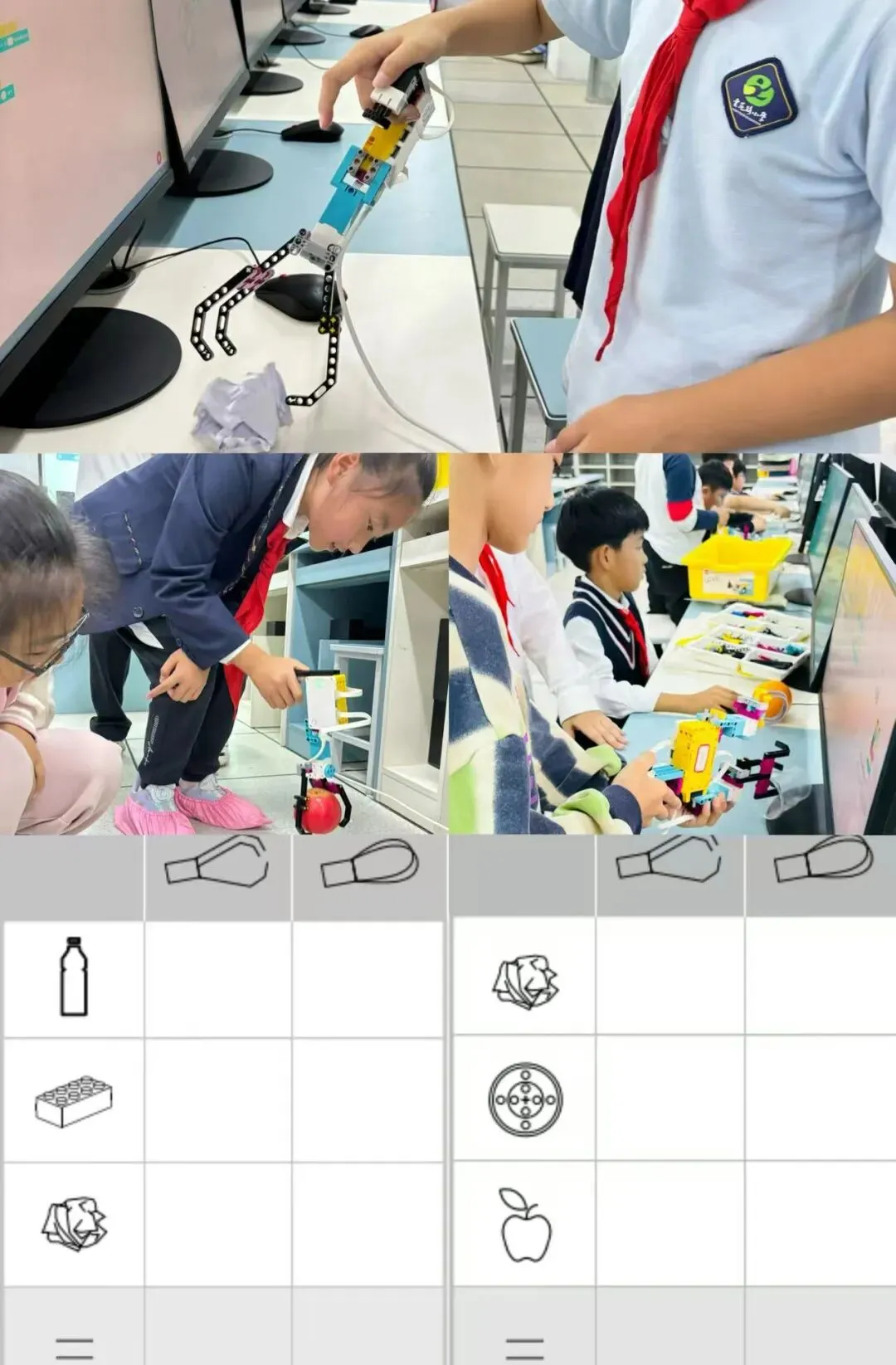
测试一:物体大小维度:用两款抓手分别抓取空塑料瓶、揉皱纸团、乐高积木,记录抓取效果;
测试二:物体重量维度:用两款抓手分别抓取乐高轮子、揉皱纸团、苹果,制定明确评分规则:能抓起并平稳移动物体得1分,抓取掉落得0分,未能抓起得-1分。
实验中,我们认真记录每一次测试的得分,发现第一款直形抓手更适合抓取小而规则的物体,第二款弧形抓手对圆形、稍重的物体抓取效果更好。在老师的引导下,我们通过对比不同抓手的结构和实验数据,终于发现了核心原理:抓手与物体之间的摩擦力越大,抓取效果越好,而抓手的形状、接触面积会直接影响摩擦力的大小。同时,我们根据实验结果对两款抓手进行了初步优化,让抓取效果更稳定。
5. 总结阶段:整理成果,反思改进
实验结束后,我们开始整理本次研究的所有资料,钟浩然主导撰写研究性学习报告,梳理研究过程、实验数据和研究成果;孟德逸凡和聂筱萱整理机械抓手的设计图、编程流程图和搭建技巧;高郡彤制作实验数据表格和成果展示PPT。我们还在班级内进行了研究成果展示,向同学们演示“清洁小帮手”的使用方法,讲解研究过程和收获,同时认真听取老师和同学们的建议,反思研究过程中遇到的问题,提出改进方案。
(二)研究成果
1. 成功制作两款功能完善的“清洁小帮手”:我们利用乐高Prime科创套装,成功搭建并调试出两款不同结构的机械抓手,均能实现通过压力传感器感应、稳定抓取并平稳放下校园常见垃圾的功能,第二款自主设计的弧形抓手经优化后,抓取适配性更强,能应用于实际的校园垃圾清理。
2. 实现跨学科知识的融合与应用:在研究过程中,我们将信息科技(乐高搭建、图形化编程)、科学(摩擦力原理)、数学(实验设计、数据收集与分析)、工程设计(机械结构设计)等学科知识充分融合,不仅理解了各学科知识的实际应用价值,更学会了用跨学科思维解决实际问题。
3. 形成完整的实验数据与研究结论:通过对比实验,我们收集了完整的实验数据,明确了“抓手形状、接触面积影响摩擦力,进而影响抓取效果”的核心结论,为机械抓手的优化设计提供了科学依据,也形成了一套完整的实验设计、操作和分析方法。
4. 提升团队协作与综合实践能力:在整个研究过程中,小组成员分工明确、互帮互助,成功解决了搭建、编程、实验中的多个问题,不仅提升了动手操作、创新思维、数据分析能力,更学会了有效沟通、协同合作,体会到了团队的力量。
5. 树立科技助力环保的理念:通过制作能解决校园垃圾清理问题的“清洁小帮手”,我们深刻体会到了科技与生活的紧密联系,不仅加深了对环保的理解,更树立了“用所学知识解决生活问题、用科技助力环保”的责任意识,激发了对STEAM学科的学习兴趣。
五、研究结论
通过本次“清洁小帮手的设计与探究”跨学科研究性学习,我们将课堂上学到的知识与生活实际结合,在动手实践、实验探究中收获了知识和能力,也得出了一系列宝贵的研究结论,为今后的学习和实践提供了方向:
1. 跨学科学习让知识更有价值:不同学科的知识并不是孤立的,而是相互关联、可以融合应用的。将信息科技、科学、数学等学科知识结合起来,不仅能解决生活中的实际问题,还能让我们更深刻地理解知识的意义,让学习变得更有趣、更有价值。
2. 动手实践是学习的重要途径:“做中学、用中学”让我们收获满满。从设计方案到搭建抓手,从编写程序到做对比实验,每一次动手尝试,都是一次学习和成长。遇到问题时不放弃,反复尝试、不断改进,才能真正提升动手实践能力和解决问题的能力。
3. 团队合作是成功的关键:一个人的力量是有限的,团队的力量是无限的。在研究中,每位成员发挥自己的特长,分工合作、互相帮助、共同解决问题,不仅让研究任务高效推进,更让我们学会了沟通、包容和协作,体会到了团队合作的快乐。
4. 观察生活能激发创新灵感:本次研究的灵感来自校园生活中的垃圾清理问题,这让我们明白,创新并不遥远,只要善于观察生活、发现问题,就能用所学知识设计出解决问题的小装置。培养善于观察、勤于思考的习惯,能让我们拥有更多的创新灵感。
5. 科技可以成为环保的助力:小小的“清洁小帮手”虽然简单,却能为校园垃圾清理提供便利,这让我们感受到了科技的力量。我们要努力学习科学文化知识,在未来设计出更多实用的科技小发明,用科技助力环保、让生活变得更美好。
六、研究反思与未来展望
(一)研究反思
本次研究性学习虽然取得了圆满成功,但在过程中我们也遇到了一些问题,值得我们认真反思:
1. 实验阶段准备的模拟垃圾数量有限,导致部分测试需要等待,影响了实验的连贯性;同时,实验中对部分轻小、易变形的物体(如轻薄纸片)抓取效果不佳,抓手的适配性还有待提升。
2. 小组合作中,部分核心环节(如编程、机械搭建)主要由擅长的同学主导,其他同学的参与度有待提高,未能充分发挥每位成员的潜力。
3. 我们的“清洁小帮手”功能还比较基础,仅能实现简单的抓取功能,没有实现自动感应、远程控制等更智能的功能,科技含量还有待提升。
(二)未来展望
针对本次研究中发现的问题,我们制定了后续的改进和探索计划,让我们的研究成果更加完善:
1. 优化“清洁小帮手”装置:后续我们会在抓手接触部位增加防滑材料,提升对轻小、易变形物体的抓取效果;同时尝试增加红外传感器等元件,编写更复杂的程序,实现抓手的自动感应抓取,让“清洁小帮手”更智能。
2. 完善小组合作模式:在今后的研究中,我们会进一步细化分工,让每位成员都参与到核心环节中,通过“互帮互学”的方式,让每个人都能提升自己的短板,实现全员共同成长。
3. 开展更多跨学科研究:这次研究让我们体会到了跨学科学习的乐趣,未来我们会继续保持善于观察、勤于思考的习惯,从生活中发现更多问题,开展更多类似的跨学科研究性学习,设计出更多解决生活实际问题的科技小装置,不断提升自己的创新思维和综合实践能力。
本次“清洁小帮手的设计与探究”跨学科研究性学习,是我们一次难忘的学习经历。我们不仅做出了能解决实际问题的小装置,更收获了知识、锻炼了能力、树立了理念。在今后的学习中,我们会把本次研究的收获和感悟运用到实际中,主动探索、勤于实践、善于合作,努力成为爱思考、爱动手、爱创新的新时代小学生,用自己的智慧和双手探索科技的奥秘,解决更多生活中的小问题!