



上周我们摘录了中国信通院发布的《人工智能产业发展研究报告(2025年)》,其中人工智能与经济社会的观点引人深思(点击蓝字查看报告全文)。本次带来的由中国信息通信研究院和清华大学电子工程系一同发布的《具身智能发展报告(2025 年)》同样值得关注。本文为报告摘录。
原文链接:
https://www.ee.tsinghua.edu.cn/info/1076/4984.htm
✦
01
产业发展总览:政策引领与全球布局
2025 年《政府工作报告》首次将 “具身智能” 列入国家未来产业重点培育清单,这一与物理实体深度融合的人工智能形态,正成为推动全球科技革命和产业变革的重要引擎。作为迈向通用人工智能的关键路径,具身智能打破了传统人工智能“在计算机中思考”的局限,通过物理本体与环境的动态交互实现 “知行合一”,推动人工智能从软件算法向软硬融合的实体智能跨越。
过去一年,具身智能产业整体展现出 “融合”“多元”“繁荣” 的发展特点:聚焦软硬、知行和虚实融合突破智能瓶颈;打造 “上天入海涉险” 多元化产品加速细分场景拓展;产业生态体系不断完善,市场空间广阔。截至 2025 年 12 月,我国具身智能和机器人领域投资事件数达 744 起,融资总额 735.43 亿元人民币,其应用前景覆盖 “工具”“用具”“载具”“玩具” 等多种类型,有望成为智慧员工、生活助手、智驾司机和智能伙伴。
图片源自网络
全球范围内,具身智能已成为科技竞争的新前沿。麦肯锡将人工智能和机器人技术列为塑造未来全球生产力的五大新兴前沿之一,Grand View Research 预测,到 2030 年人形机器人、自动驾驶汽车、无人机三大核心载体的累计市场规模将达到 3398.4 亿美元。英伟达、特斯拉、OpenAI 等国际科技巨头纷纷押注,国内则形成了以北京、广东、上海为核心的产业集聚区,352 家核心企业构建起覆盖行业应用、产品服务、技术服务和基础设施的完整产业链。
同时,产业发展也面临三大 “非共识” 争议:路径选择上数据和模型孰重孰轻、本体构型上通用终极形态与场景专用构型之争、数据方案上真实数据与仿真 / 合成数据的选择与混合训练问题。具身智能整体处于发展早期,“数据 - 模型 - 本体 - 场景” 难闭环,商业模式、规模化量产、标准缺失等产业化挑战亟待解决,商用落地正从 “科研试验” 迈向 “进厂入户”。
02
核心内涵与能力演进:从智能闭环到三维升级
智能闭环:具身智能的核心架构
具身智能的核心内涵在于构建基于身体交互的 “智能闭环”,并非 “人工智能 + 机器人” 的简单叠加,而是集三大要素于一体的综合智能体系:
具身本体
具身本体实现从单系统到复合系统的升级,人形机器人、无人驾驶汽车和无人机被称为未来生活 “智三样”;
智能内核
智能内核依托大模型、世界模型与多模态技术,实现认知、决策与行动的统一;
环境交互
环境交互则以 “第一人称视角” 让智能体与现实物理世界进行动态交互和自适应学习,完成数据的采集与反馈。
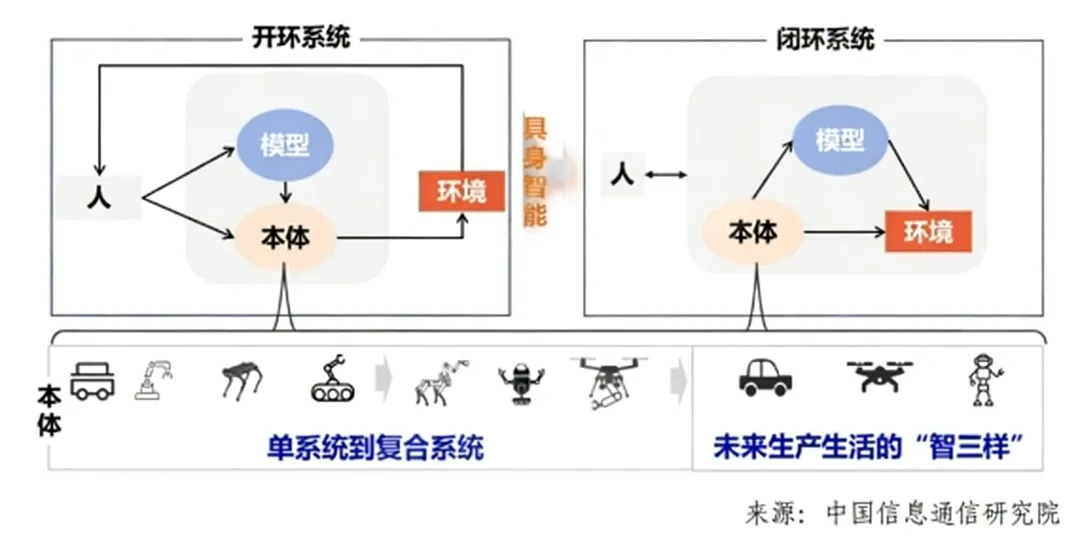
具身智能三要素及闭环系统
三大核心能力:认知、协作与学习的全面提升
国际电信联盟(ITU)明确具身智能的三大核心能力升级方向:
认知能力从 “看见” 到 “看懂”,通过多模态数据联合训练理解空间关系;
协作能力从 “单机执行” 到 “协同作业”,依托端 - 边 - 云协同突破资源限制;
学习能力从 “干前学” 到 “干中学”,通过适应现实场景中的不可预测情况,实现从 “做得到” 向 “做得好” 的转变。
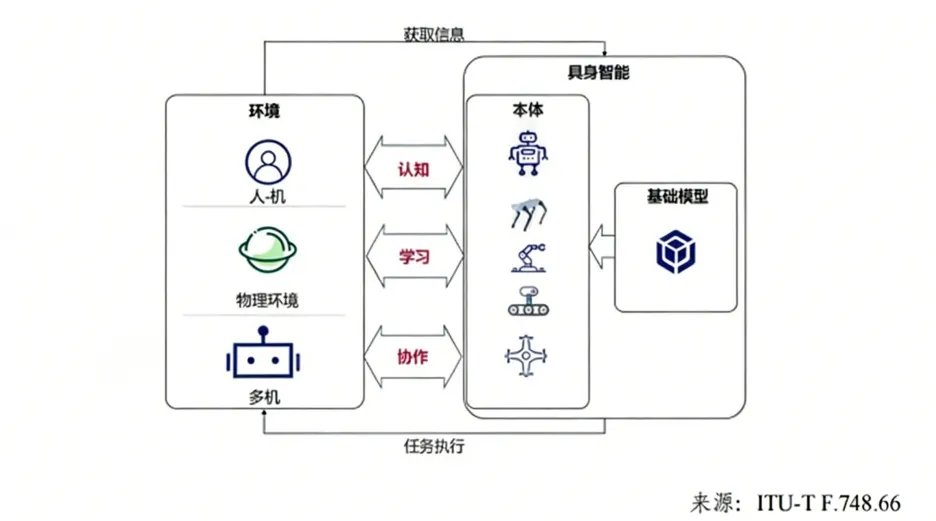
具身智能概念内涵及特征示意图
这三大能力的提升,让具身智能具备了跨场景、跨任务的泛化能力,成为连接数字世界与物理世界的重要桥梁。
03
技术创新突破:数据、模型与本体的协同进化
数据驱动:高质量数据的采集与应用探索
数据作为具身智能闭环飞轮的启动起点,是模型通用化发展的核心原料。行业围绕仿真合成数据和真实采集数据开展广泛实践。仿真合成数据依托物理模拟引擎和世界模型,采集效率高,英伟达 Isaac Sim 平台、银河通用合成数据管线已能实现十亿级数据快速生成;真实采集数据通过遥操作、开放环境采集、动作捕捉等方式获取,数据质量最高但成本居高不下,星尘智能力遥操作平台、上海人工智能实验室 HOMIE 遥操作系统成为行业主流方案。
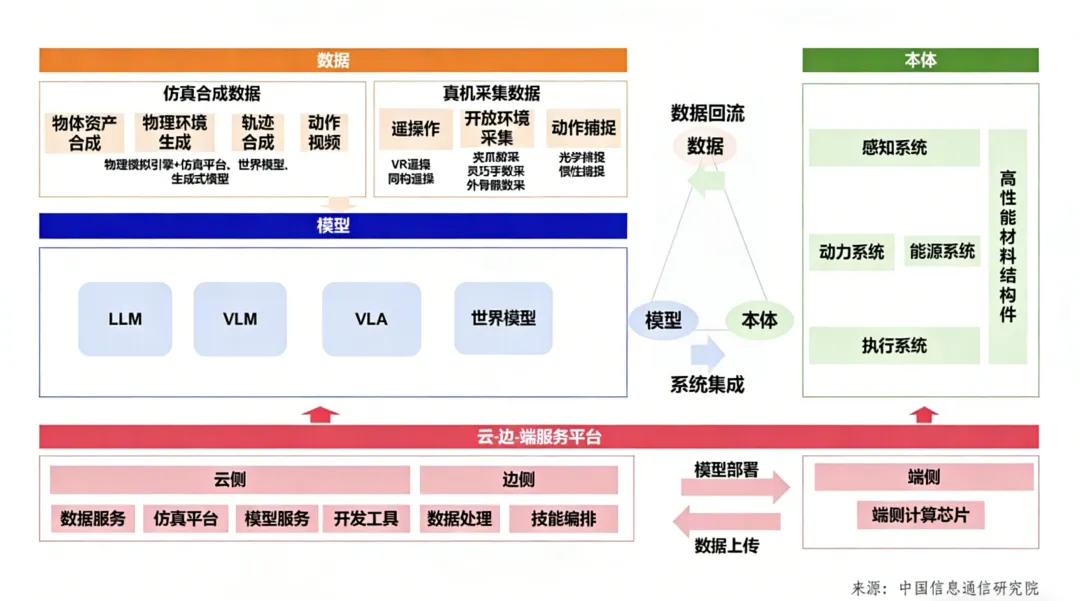
具身智能技术框架
当前,具身智能发展面临百万小时甚至千万小时高质量真实行为互动数据的缺口,数据采集的适配性、处理的标准化、使用的高效化成为亟待解决的问题。行业探索形成三类数据训练策略:真实到仿真再到真实的多源数据训练、仿真到真实的大规模合成数据训练、真实到真实的真机数据学习,以实现数据价值最大化。
模型演进:多路径探索与技术融合
模型作为具身智能的 “智能内核”,尚未形成统一技术路径,模块化分层、分层大模型、端到端大模型和世界模型四条路线并行发展。2025 年,模型创新聚焦 “通用大脑” 和 “技能可扩展学习” 两大方向,视觉语言动作模型(VLA)成为研究热点,谷歌学术相关论文一年内翻近 4 倍,达 1700 余篇。
端到端 VLA 呈现 “大一统” 和 “分层协作” 两类架构设计,Figure AI Helix 模型实现 7~9Hz 认知推理和 200Hz 本体运控的协同,清华大学 UniAct 模型展现出强大的跨本体迁移能力。同时,世界模型与 VLA 的融合、力觉触觉等多模态融合、强化学习的引入,成为模型能力突破的重要方向。训练范式上,预训练结合后训练的分阶段方式、“好奇心驱动”“自我改进”“终身强化学习” 等方法不断涌现,推动模型从 “演示” 向 “实用” 跨越。
但当前模型仍面临泛化性有限、长程任务执行能力不足、软硬协同难度大等问题,多时间尺度的协同控制成为技术瓶颈。
本体创新:多元形态与核心零部件突破
本体作为具身智能的物理载体,呈现多元发展态势,人形机器人、四足机器人、轮臂复合机器人、自动驾驶汽车、无人机等多种构型同步演进。底层硬件模块具有一致性,零部件工艺链技术可实现跨领域复用。自动驾驶的传感器方案、汽车工业的传动技术、新能源领域的电池技术纷纷向机器人领域迁移,氢燃料电池、碳纤维复合材料等新技术的应用持续降低本体成本、提升性能。

图片源自网络
机器人作为创新热点,围绕一体化关节、灵巧手、力触觉传感器和电子皮肤等重点突破:宇树关节模组将体积缩小至传统方案的 1/3,散热效率提升 50%;灵心巧手 Linker Hand 系列科研版自由度最高达 42 个;六维力传感器、多模态电子皮肤成为研发热点。但本体规模化部署仍面临物理局限性、标准化不足、成本居高不下三大难题,千台级标准化量产的鸿沟尚未跨越。
云 - 边 - 端协同:支撑现实应用落地的运行体系
端侧计算芯片向高算力、大带宽、低能耗和集成化方向升级,英伟达 Jetson Thor、地平线远征 6P 等产品成为主流,为大模型端侧部署提供算力支撑。云 - 边 - 端分布式计算形成互补运行环境:
云侧作为 “大脑” 升级的算力底座,提供数据服务、仿真训练等开发支持;
云端协同依托统一开发平台实现 “脑” 与 “身” 协作开发;
边云协同提供数据实时分析处理能力;
端边云协同依赖操作系统及中间件优化本体功能开发。
目前,云边端协同仍面临接口兼容性、端侧计算限制、通信和资源分配限制等技术挑战,需通过标准化接口、算力优化、网络稳定性提升等方式逐步解决。
04
产品谱系丰富:从热门载体到前沿探索
机器人:最 “热门” 的具身智能载体
人形机器人
双足人形机器人运动和作业能力同步升级,Figure AI Figure 03 能连贯完成 “收盘子、冲洗、放入洗碗机和返回充电座” 等长链条动作,国内宇树、智元、优必选等企业产品纷纷亮相赛场和训练场。
图片源自网络
轮式人形机器人凭借作业、续航和成本优势,成为短时间内最具应用价值的产品,在工业制造、商业服务场景中加速落地,智元机器人与富临精工达成合作,近百台机器人投入产线使用。但人形机器人仍面临 “不能用、不愿用、不敢用” 的问题,作业能力、综合成本、安全规范成为落地阻碍。

图片源自网络
四足机器人
机器狗成为四足机器人主要设计形态,运动性能和交互智能大幅提升,浙江科创中心 “黑豹” 四足狗以 10.3 米 / 秒的速度打破世界纪录,宇树 Unitree A2 能承受 100kg 负载。在商用领域,云深处绝影 X30 实现 1000 小时无故障电力巡检;消费领域,科技 Loona 机器狗半年达成 400 万美元销售额。轮足和六足机器狗也展现出互补优势,在配送、重载等场景形成差异化应用。
图片源自网络
仿生机器人与智能机械臂
清华大学深圳国际研究生院研发的仿生蝠鲼软体机器人、哈尔滨工业大学蛇形机器人,在水下探测、灾害搜救等特殊场景提供新方案。传统工业机械臂在具身智能加持下实现从程序执行到自主作业的 “跃迁”,助力企业柔性制造,高空玻璃幕墙清洗、太阳能光伏板清洁等专业化机器人已实现小批量落地。

图片源自网络
智能运载装备:落地 “最快” 的应用场景
自动驾驶汽车
具身智能让车辆交互性和复杂路况处理能力明显提升,理想 i8 搭载 VLA 司机大模型可通过简单指令调整行车路线,Waymo EMMA 端到端模型能适应性应对潮汐车道、施工区等复杂场景。政策层面,《北京市自动驾驶汽车条例》等地方性法规陆续出台,为商业化提供支撑。L3 级车型量产和 L4 级商业化运营并行推进,百度萝卜快跑全无人订单每周超 25 万,特斯拉、Waymo 等企业在 Robotaxi 领域持续加码。但法律法规完善、高质量场景数据获取仍是主要挑战。
图片源自网络
无人驾驶航空器
无人机和电动垂直起降飞行器(eVTOL)向具备自主作业能力的飞行机器人进化,香港大学 SUPER 飞行机器人可在无 GPS、无预绘地图条件下实现复杂环境自主导航。美团无人机在香港航线实现外卖配送效率提升近 7 倍,贵安新区 110 架无人机协同完成电力线路巡检,亿航智能物流 eVTOL 完成 82.9 公里城际运输验证。当前面临智能水平提升、续航载荷限制、管理体系滞后等问题,需通过技术突破和标准完善推动规模化运营。

图片源自网络
无人船
搭载具身智能的无人船实现水文监测、安防巡检、河道运维、水上救援等全自主功能,欧卡智舶 APAS 具备感知识别、自主定位、规划决策和自主控制能力,可实现自主航行、避障和靠离泊。
图片源自网络
新型智能产品:前沿探索方向
变形移动装置、集群式微型智能机器人、智能可穿戴装备等新式产品构型加速探索。瑞士洛桑联邦理工学院 GOAT 自适应变形装置可实现多种运动模式切换,有望应用于应急救援、野外探索等场景;香港中文大学微型机器人集群未来可期应用于靶向给药、细胞操作等医疗领域。
智能外骨骼作为最具落地潜力的可穿戴产品,分为上肢、下肢和全身三大类型,在工业搬运、康复医疗等场景形成解决方案。但面临成本高、续航低、舒适度差三大瓶颈,目前具备 AI 动态调节、多模态交互等技术的智能外骨骼产品价格高达数十万元,续航和佩戴体验仍需优化。
05
产业生态完善:从产业链构建到安全治理
产业链与区域布局:多点协同与集聚发展
具身智能产业链横跨多个领域,分为行业应用、产品服务、技术服务和基础设施四大板块。
行业应用方面,工业、家庭、商业和应急行业企业占比合计达 80%;
产品服务方面,人形机器人(双足 / 轮式)企业占比 32%,为业界关注热点;
技术服务方面,算法模型、系统集成和数据服务 “三足鼎立”,模型领域企业占比 43%;
基础设施方面,执行系统、工具平台和传感系统成为行业热点,占比分别为 36%、22% 和 20%。
区域布局上,产业地域集中度极高,北京市(93 家)、广东省(78 家)、上海市(50 家)三地企业数量合计占比近 50%,江苏省(35 家)、浙江省(33 家)紧随其后,形成 “头部集中、长尾分布” 的态势。同时,行业涌现出一批新式集成商,通过专业化、定制化服务解决供需双方衔接不够紧密的问题。
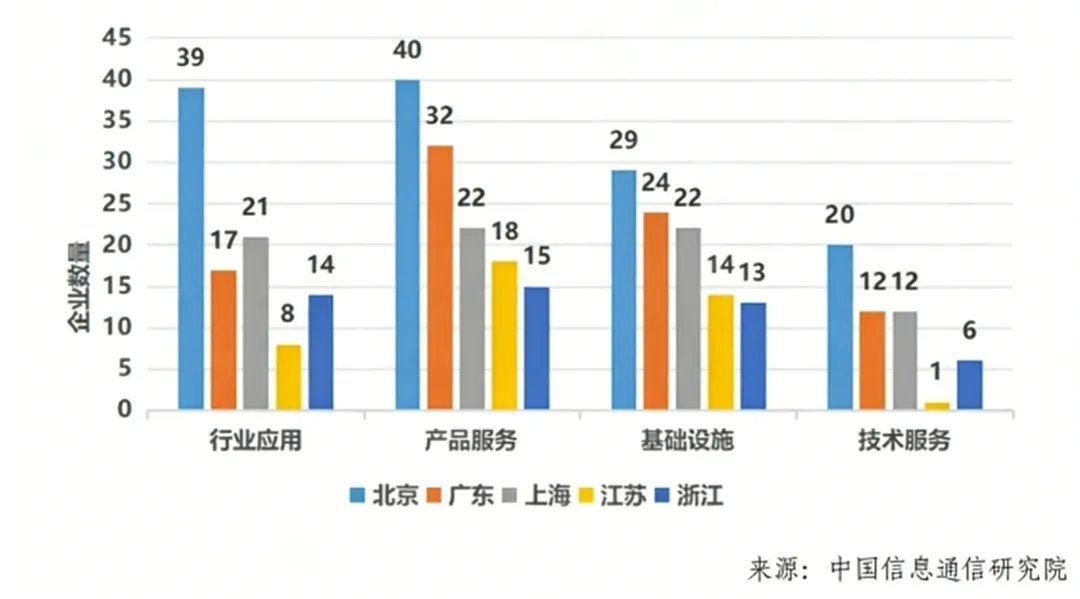
具身智能主流企业区域分布图
训练场建设:数据采集与模型训练的核心支撑
具身智能训练场通过搭建应用场景、采集数据、训练模型和反馈迭代,破解物理世界数据采集成本高、效率低的核心瓶颈。截至 2025 年 12 月底,国内已建成超过 30 家具身智能训练场,覆盖十余省市,公开披露的 21 家训练场总面积超过 10 万平方米。
训练场呈现三大特点:
1
一是广泛覆盖制造、物流、服务、能源电力、医疗等重点应用场景,北京人形机器人数据训练中心、天津帕西尼具身智能超级数据工厂等构建多场景实训环境;
2
二是支持多品牌、多构型本体入驻,上海张江异构人形机器人训练场部署 100 余台不同构型机器人,形成 “异构群智” 训练模式;
3
三是建设主体清晰,分为政府主导下的企业联合体和机器人企业自建两类,部分训练场探索数据交易模式,实现向 OpenAI、Google 等公司的数据产品销售。
但训练场仍面临真实场景覆盖有限、跨场数据难以互通互用、商业模式不明确等挑战,需通过标准化和第三方评估实现 “评估达标 - 市场认可 - 商业盈利 - 持续投入提升能力” 的正向循环。
标准体系建设:破解产业发展瓶颈
由于具身智能尚处于产业发展初期,标准体系建设需兼顾当前需求与未来发展空间。当前产业存在三大问题亟需标准化解决:要素共享不足导致创新资源浪费,数据 “重复采、不好用、难共享”;智能化评价体系未统一,缺少可操作、可量化的评价指标;安全与伦理标准缺失,存在本体安全、交互安全和应用安全等风险。
为加快标准化建设,2024 年工业和信息化部建立人工智能标准化技术委员会,下设具身智能工作组(WG6),从系统研发支撑、智能系统技术、系统集成和系统应用四方面统筹推进标准体系建设。目前正加速开展具身智能系统智能化分类分级总则、基准测试方法、数据质量要求及评价方法等多项产业亟需标准的研制工作,通过标准领航推动产业健康有序发展。
安全问题治理:规模化落地的重要保障
具身智能的安全问题分为模型安全、本体安全和信息安全三部分,成为规模化落地的限制要素。
模型安全面临对抗攻击、反常指令规避、跨场景性能衰减等问题,已有研究实现对具身智能系统的 “越狱攻击”;
本体安全的核心是保护用户物理安全,需从紧急制动、倾倒控制、安全距离保持、碰撞力阈值四方面构建防护体系;
信息安全关乎用户隐私保护,具身智能产品搭载的多模态传感器可能成为窃取个人隐私与商业机密的工具。
当前,国内外尚未出台具身智能安全领域的国家层面规范文件,需构建纵深防御的安全机制体系,包括传感器权限分级控制、硬件级加密与防篡改、实时数据脱敏处理等,同时建立全生命周期治理体系,确保技术服务于人类。
06
未来展望:技术、应用与伦理的协同发展
技术架构重构:从 “功能模块堆叠” 到 “多模态认知融合”
未来,具身智能将实现感知、决策、认知、行动全链路贯通,推动多技术融合创新。
认知层面
突破多模态范式深度融合,构建时空对齐的多模态融合表征,基于世界模型发展具身智能认知引擎,实现物理规律内化;
学习层面
探索类似人类的场景记忆和学习能力,提升跨场景适应和跨本体迁移能力,通过小时级实训即可上岗作业;
协作层面
完善软硬件通信协议与协作机制,提升多机协同和人机协作能力,探索人机协作新模式。
应用场景深化:从 “演示” 到 “实用” 的跨越
具身智能将以场景任务需求为导向,深刻赋能千行百业,形成 “突破一批、量产一批、普及一批” 的发展格局。在工业制造、物流仓储、医疗康养、商业服务等场景,具身智能将成为生产工具,推动行业向智能化、柔性化转型;生产工具规模化升级将重构生产关系,使人机协作更加紧密;未来有望覆盖国民经济 20 个门类,在垂直应用领域孕育数个万亿级市场,呈现 “探索底层通用加速垂直场景规模化应用” 的 “梳子型” 产业结构。
安全伦理构建:从 “合规” 到前瞻布局 “伦理协同框架”
随着具身智能从实验室走向社会,安全与伦理问题成为产业关切重点。未来将实现从安全被动响应模式向主动预防模式转变,将安全与伦理准则内化为系统固有属性;探索动态、敏捷的治理模式,建立覆盖技术研发、产品认证、场景部署与失效追溯的全生命周期治理体系;形成人机协同与公众参与的社会共识,明确具身智能的工具属性,制定以人为本的设计规范、伦理准则和法律法规,确保其与人类价值观保持一致,真正辅助于人、服务于人。
具身智能的发展是一场由技术、工程、场景与资本合力推动的全球浪潮,其不仅是人工智能技术的一次重要升级,更是对人类生产生活方式的深刻变革。在国家政策支持、技术创新驱动、产业生态完善下,具身智能必将突破现有瓶颈,实现从 “科研试验” 到 “产业应用” 的跨越,成为推动社会智能跃升、促进生产力和生产关系深层次变革的重要力量,开启人机共融的智能新时代。
点击领取报告原文?
往期推荐

洞见 | 当57%工作可自动化,AI时代的人机关系如何重塑未来?

当提到“具身智能”时,我们究竟在说什么?

洞见|解读2026AI发展趋势,生物学、传播学等多领域教授发声

人类智能 vs 人工智能?达成互补也许是AI应用于教育的最优范式
关注我们,探索AI时代创新教育
编辑&排版:罗心怡 审核&校对: 欧卉靖