发布 | 无人机飞行控制领域深度研究报告
在无人化产业向“深水区”跨越的关键阶段,飞行控制系统已从单一的姿态稳定器演变为支撑任务级自主、多源感知融合与严苛合规要求的“安全关键系统” 。本报告系统性梳理了自2019年至今,在全球监管趋严、算力平台跃迁及AI技术渗透背景下,无人飞控系统在模块化架构、多源感知融合、约束优化控制及高可信安全合规等维度的核心演进逻辑,并为未来3-5年的产业布局提供决策参考 。欢迎联系获取完整版报告!- 全栈架构解析:对比PX4、ArduPilot等主流开源飞控栈的工程实现,解析从实时操作系统(RTOS)任务调度到1kHz级高频闭环的确定性时延管理 。
- 控制算法谱系图谱:评估比例-积分-微分控制(PID)、模型预测控制(MPC)、鲁棒自适应控制及学习型控制(RL)在实机应用中的性能边界与算力开销 。
- 多模态感知跃迁:探讨在全球导航卫星系统(GNSS)受限环境下,视觉惯性里程计(VIO)/激光雷达惯性里程计(LIO)紧耦合定位、事件相机等前沿技术如何提升复杂环境下的飞行鲁棒性 。
- 全球合规深度对标:解读中国《无人驾驶航空器飞行管理条例》、美国Remote ID标准及欧盟风险分类框架对飞控架构的结构性影响 。
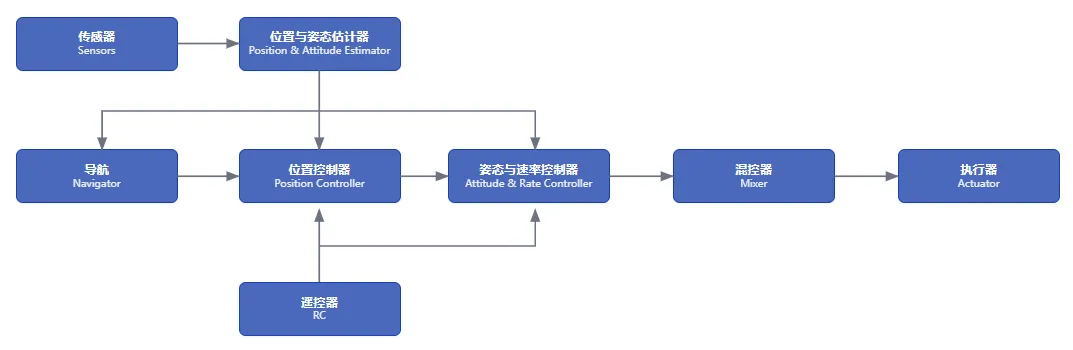
报告指出,无人飞控竞争力正从单一算法的先进性,向系统级的“确定性实时闭环”与“退化可控性”转型 。分析“飞控硬实时闭环 + 伴随计算机任务异步扩展”的主流分层设计趋势 。主流架构已确立“分层计算”模式,将硬实时闭环留在飞控板,而将重感知与规划任务放在伴随计算机 ;飞控硬件普遍采用高性能微控制单元(MCU),集成多IMU、双气压计等冗余配置以降低单点故障风险 。详解模型预测控制(MPC)类算法在处理执行器饱和、质量不确定性及风扰方面的显著优势 。MPC及其鲁棒/自适应变体在处理质量变化、风扰及执行器退化方面表现出更强的鲁棒性 ;学习型控制正通过引入“安全过滤器”或“安全包络”解决分布外风险,实机性能已在无人机竞速对抗中达到冠军级水平 。对比从传统扩展卡尔曼滤波(EKF)到因子图优化(FGO)的演进,及其在定位精度与实时性间的平衡策略 。状态估计不再局限于飞控内部EKF,视觉与激光雷达已成为位置系统的主来源 ;新型传感技术如事件相机,凭借微秒级时间分辨率,正在推动高动态飞行下的低时延感知控制闭环 。从通信带宽、时间同步到分布式规划,剖析大规模无人机集群落地过程中的系统级挑战 。多机协同的瓶颈在于定位基础设施、通信带宽与时间同步 ;通过在机载端实现500Hz的高频闭环,可显著降低系统对无线电通信丢包的敏感性 。探讨将“安全过滤器”嵌入学习型控制策略,实现自主决策与运行时安全约束的强制满足 。中国自2024年起施行新的运行安全管理规则,强调按风险分级分类管理,并对接综合监管平台 ;Remote ID、链路加密(如针对MAVLink的改进)及数据安全已从“可选配置”变为“工程必选项” 。未来3-5年,飞控系统的核心竞争力将体现在可验证的安全性与多源感知在复杂环境下的退化可控能力 。研发的关键盲点往往不在于算法优劣,而在于系统级的失效模式是否被充分建模与验证 。以上分析是航空产业网打造的“经度”系统(“航空航天市场与供应链信息系统”)的一部分,欢迎扫描下方二维码添加微信客服或点击阅读原文注册,联系我们进行产品演示。
—— 推荐阅读 ——
解决方案 | 金融机构如何精准把握航空航天万亿级市场机遇