


2026年初,《“人工智能+制造”专项行动实施意见》正式发布,国家层面明确提出要建设人形机器人中试基地,并将机器人作为破解养老服务人力短缺的核心动力。这种从顶层设计到应用场景的全面铺开,意味着机器人正从技术攻坚阶段步入产线标杆建设的关键期。同时,养老服务机器人也被要求在家庭、社区等场景实现规模化应用,推动服务模式从简单的机械照护向精准服务跨越。
本次梳理围绕机器人产业链的核心环节展开,统计了大脑算法、感知系统、执行机构及核心零部件的最新数据,列举了包括传感器、减速器、灵巧手在内的多家关键公司与技术方向。
一、机器人赛道的投资逻辑
机器人行业的进入门槛在多个维度上低于新能源汽车。从零件数量来看,人形机器人约为2000-3000个独立零件,远少于汽车上万个零件的规模。这种零部件数量的减少直接降低了供应链管理的复杂程度。在研发费用和建厂费用上,机器人的投入也更具灵活性。新能源车需要庞大的冲压、涂装、总装产线,而机器人生产线在初期的自动化程度和空间需求更低,资金周转效率更高。
相比之下,机器人的增速预期更为陡峭。汽车的应用场景主要局限于出行,而机器人的应用则覆盖了从工业制造、物流配送到家庭养老、医疗康复的众多领域。随着2025年《中共中央关于制定国民经济和社会发展第十五个五年规划的建议》将具身智能列为新的经济增长点,机器人已经成为国际竞争的战略高地。各国都在通过税收激励和资金支持,试图在这一场新的工业复兴中占据先机。
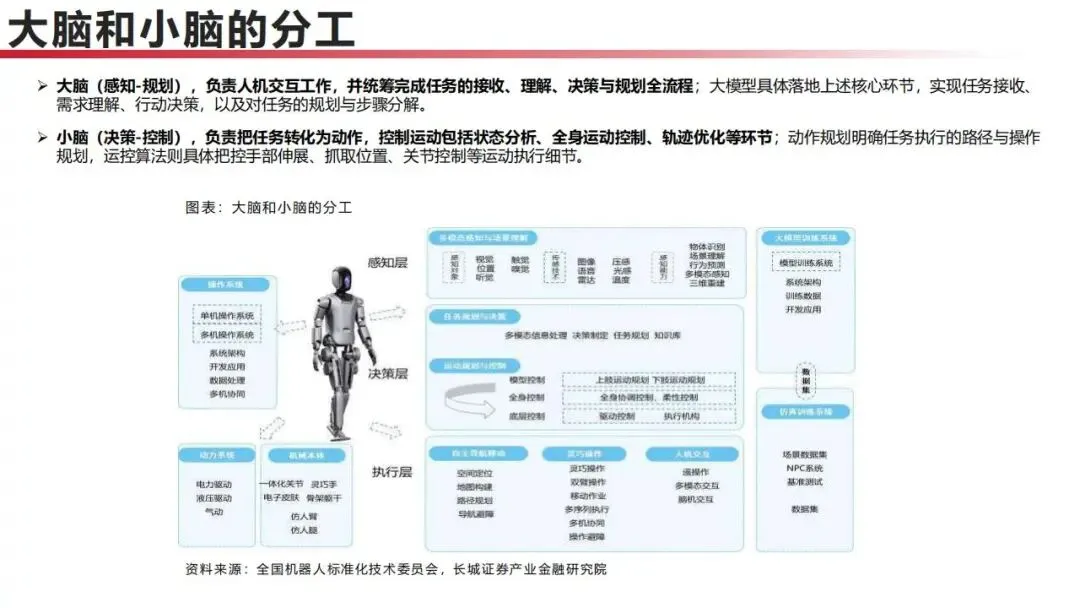
二、大脑与小脑的协同进化
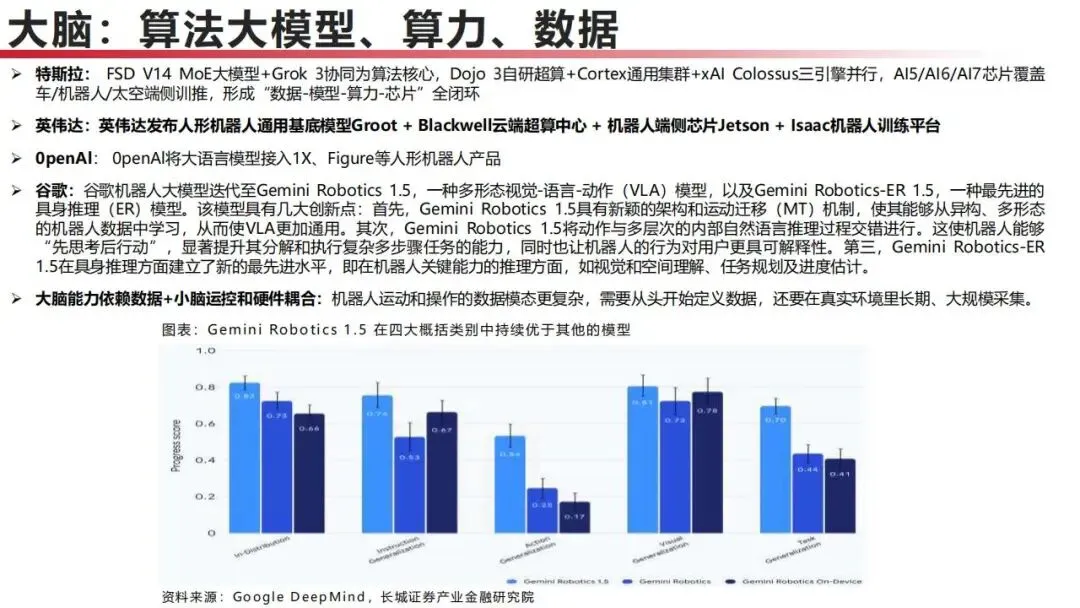
机器人的智能化依赖大脑与小脑的精密分工。大脑作为感知与规划的核心,负责人机交互及任务的理解与拆解。大模型在这一环节起到了决定性作用。比如谷歌推出的Gemini Robotics 1.5,采用了多形态视觉-语言-动作(VLA)模型架构。这种架构的创新点在于它能从异构机器人数据中学习,并将动作与内部自然语言推理过程交错进行。这意味着机器人可以“先思考后行动”,极大提升了分解复杂多步骤任务的能力,也让行为变得更具可解释性。
小脑则专注于决策与控制,将大脑生成的任务逻辑转化为具体的物理动作。这一过程涉及全身运动控制、状态分析和轨迹优化。目前行业面临的核心挑战是数据短缺。根据统计,大语言模型的数据集已达15T tokens级别,而机器人模型的数据集规模仅为2.4M episodes,差距悬殊。为了补齐数据缺口,特斯拉利用FSD V14 MoE大模型结合Grok 3形成算法核心,并依托Dojo 3自研超算和xAI Colossus集群,构建了从数据采集到模型训练的全闭环。
三、感知系统的精密感知与国产化
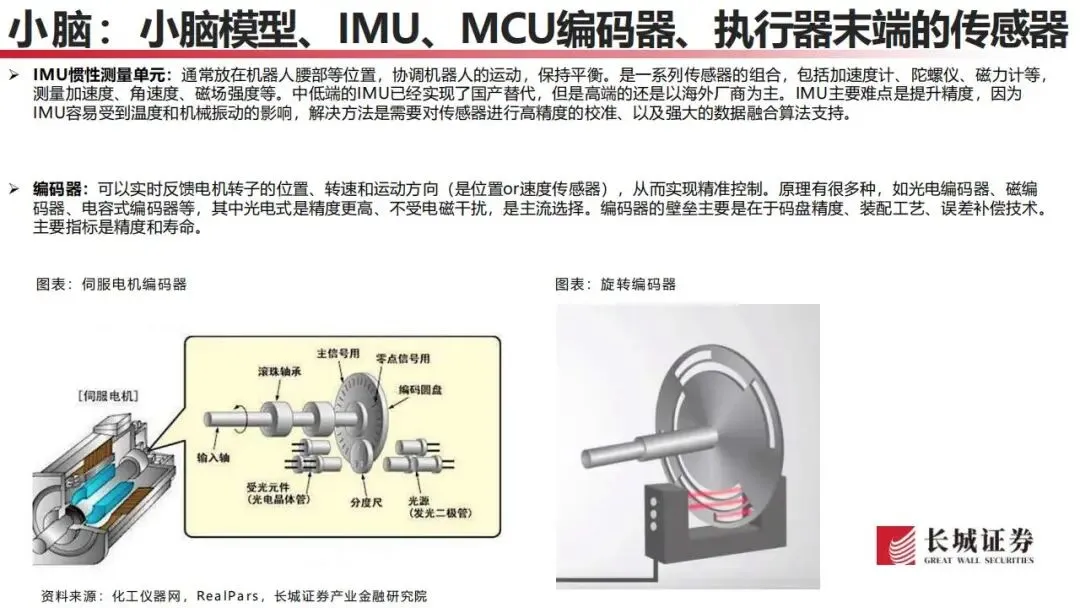
传感器被视为机器人的皮肤、眼睛和耳朵。IMU惯性测量单元通常安装在机器人腰部,用于测量加速度和角速度以维持平衡。虽然中低端IMU已实现国产替代,但高精度产品仍依赖海外厂商。IMU的难点在于提升精度并减少温度和振动带来的误差,这需要极其精准的校准技术。
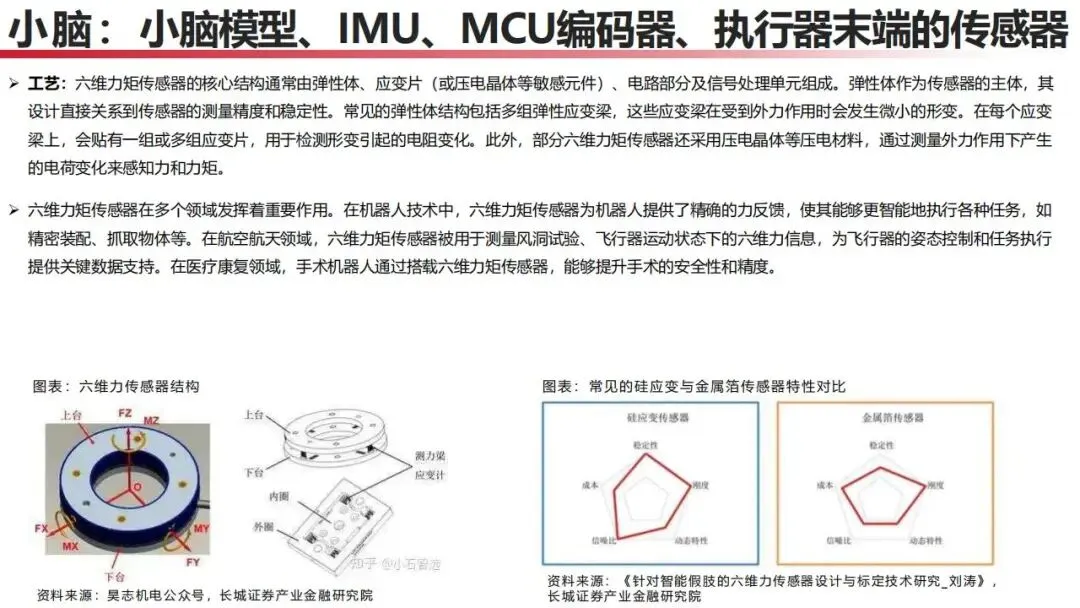
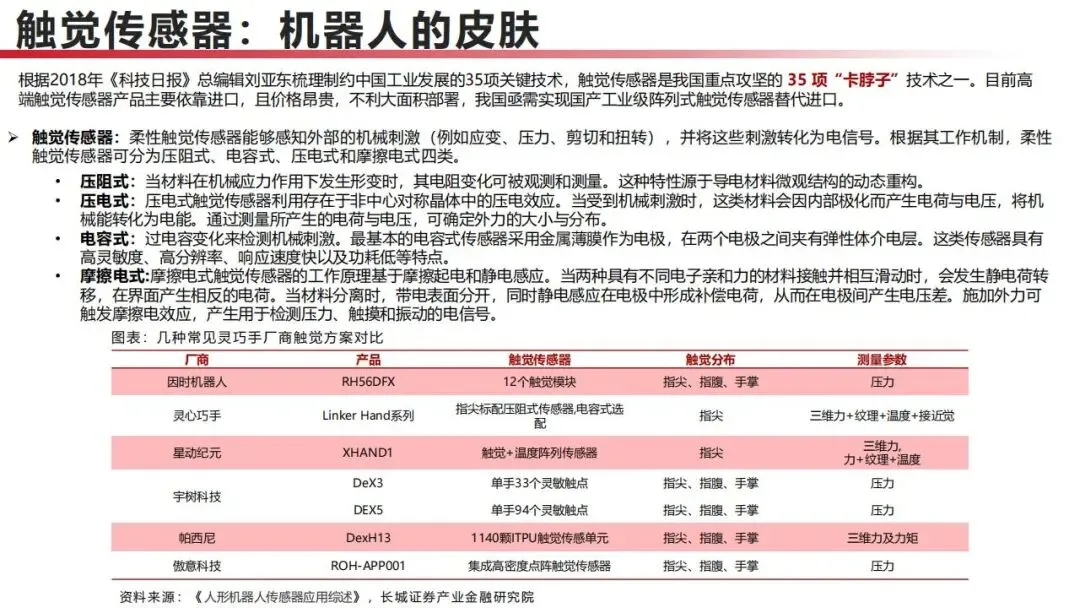
在力觉感知方面,国内一维力传感器价格已降至100-1000元,六维力传感器价格约为2000元,远低于海外三万元以上的报价。六维力传感器的核心是电阻应变片,它通过测量金属箔在机械形变下的电阻变化,将压力转化为电信号。触觉传感器,即电子皮肤,则是目前国内重点攻坚的“卡脖子”技术。宇树推出的DeX3和DEX5灵巧手分别拥有33个和94个灵敏触点,覆盖指尖、指腹和手掌。帕西尼的DexH13则集成了1140颗ITPU触觉传感单元,具备感知三维力及力矩的能力。此外,因时、灵心巧手、星动纪元、傲意等公司也在触觉方案上各有侧重,产品涵盖了压力、纹理及温度感知。
四、视觉方案的技术路径
机器人的眼睛主要采用3D视觉方案。飞行时间法(TOF)通过测量激光脉冲往返时间来计算距离,具有速度快、抗干扰强的特点。激光三角测量则利用几何关系计算位移。结构光技术通过投射已知图案并捕获其形变来获取深度信息。相比之下,传统的2D视觉由于缺乏深度数据,难以在复杂的三维物理世界中实现完整重现。目前的视觉传感器市场中,索尼和英飞凌拥有较强的技术积累。
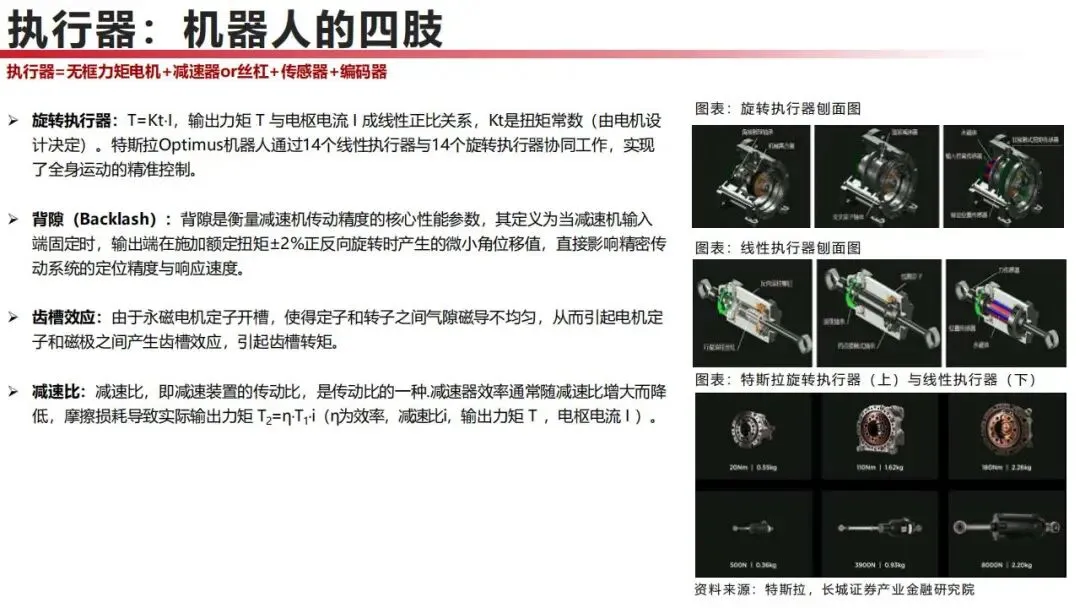
五、执行机构的核心零部件
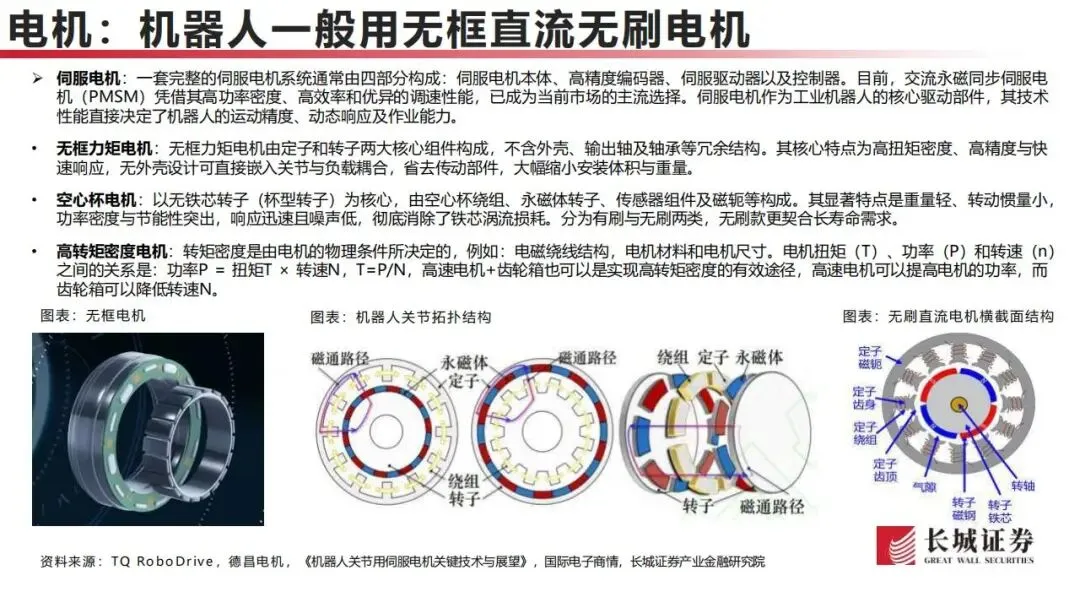
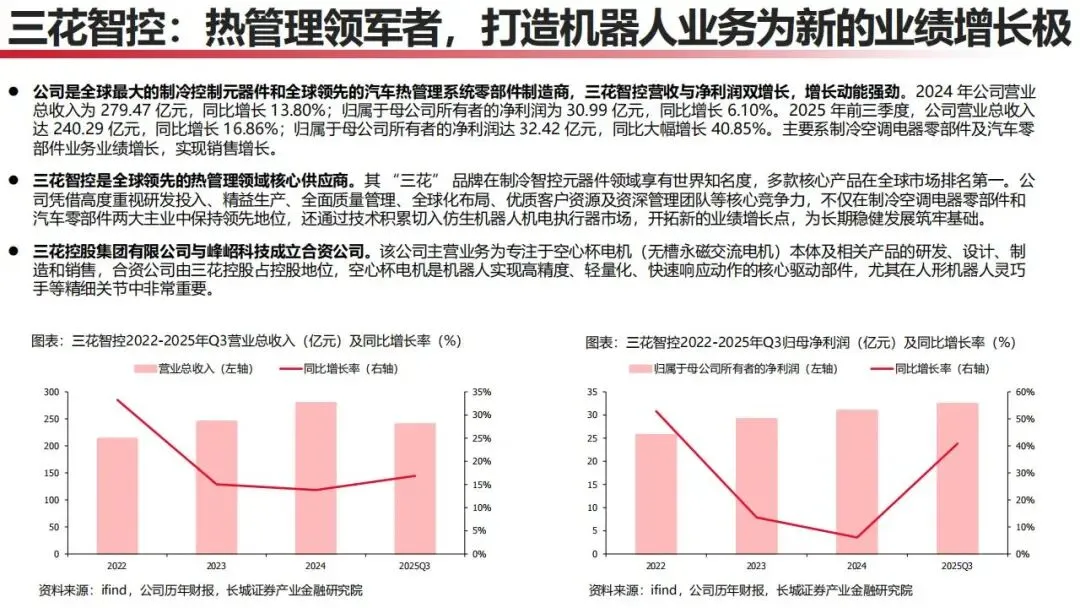
执行器是机器人的四肢,由电机、减速器、编码器和传感器集成而成。无框力矩电机因为没有外壳和输出轴,可以直接嵌入机器人关节,从而减小体积并提高扭矩密度。空心杯电机则采用无铁芯转子,重量轻、转动惯量小,特别适合需要迅速响应的灵巧手环节。德昌、上海合纵、蓝菱等公司在电机领域表现活跃。
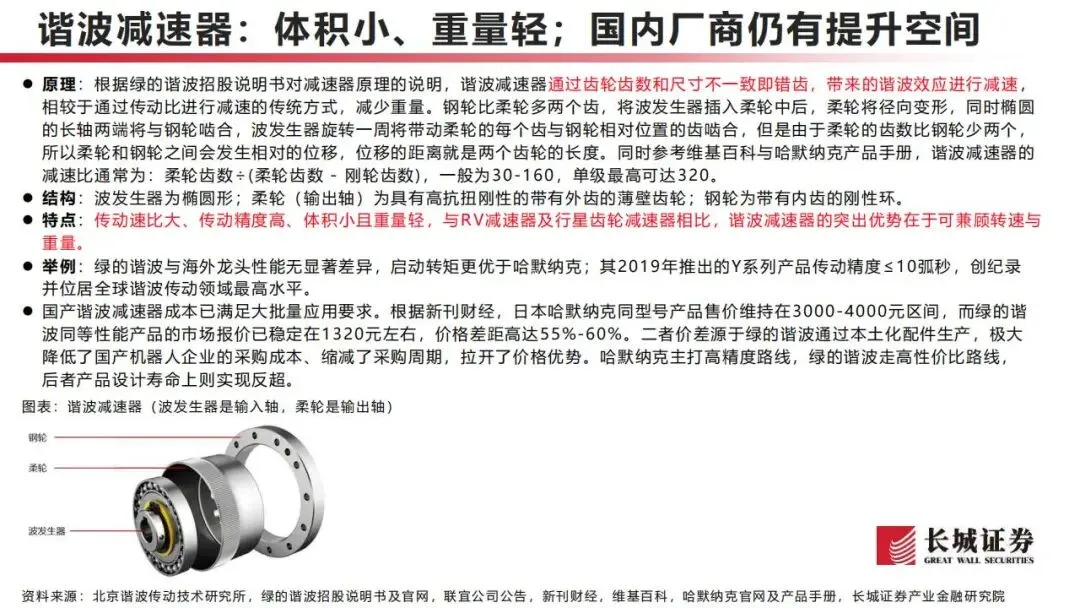
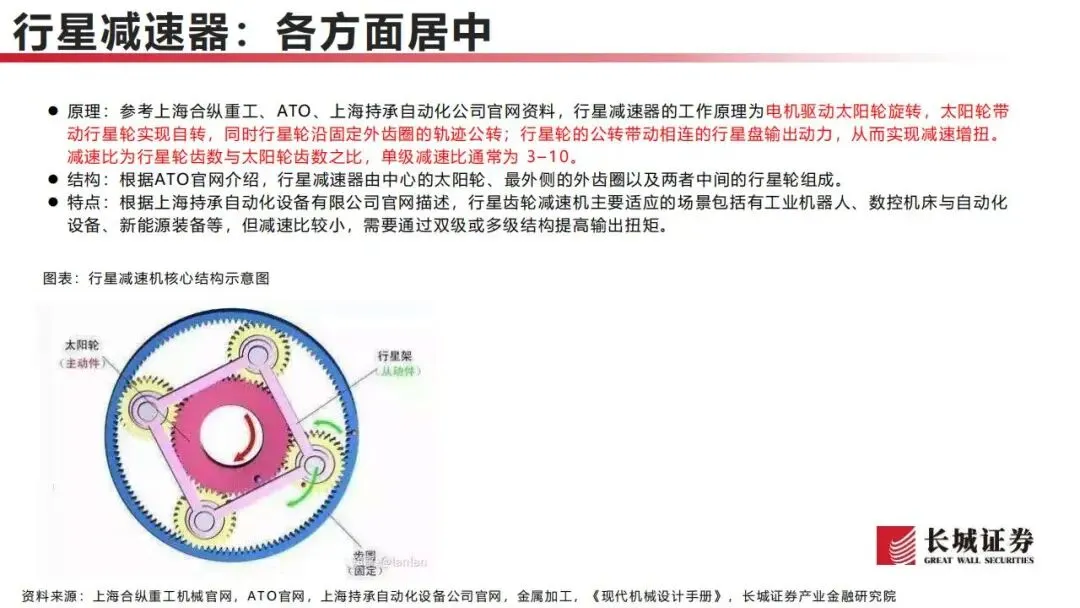
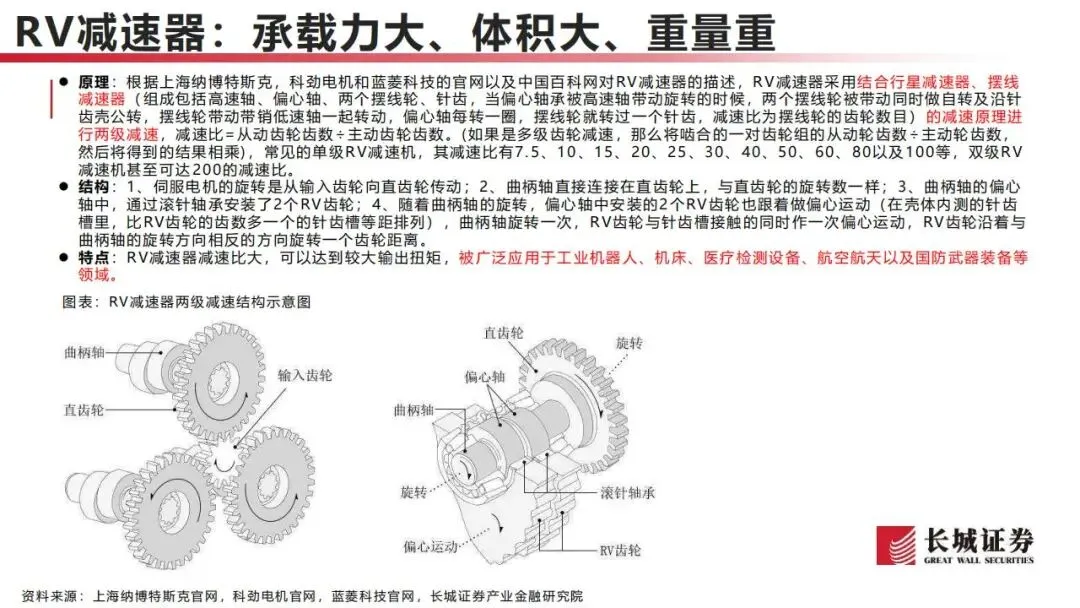
减速器作为精密传动的核心,其类型选择取决于应用场景。谐波减速器结构紧凑、重量轻,非常适合机器人上肢关节。绿的研发的Y系列产品传动精度已达到全球领先水平,且价格仅为哈默纳克同类产品的40%左右。RV减速器虽然自重较大,但承载能力强、寿命长,更适配下肢重负载关节。纳博特斯克、双环、中大力德等公司是RV减速器的重要参与者。行星减速器则在传动效率和平稳性上表现均衡,常用于对减速比要求适中的自动化设备中。
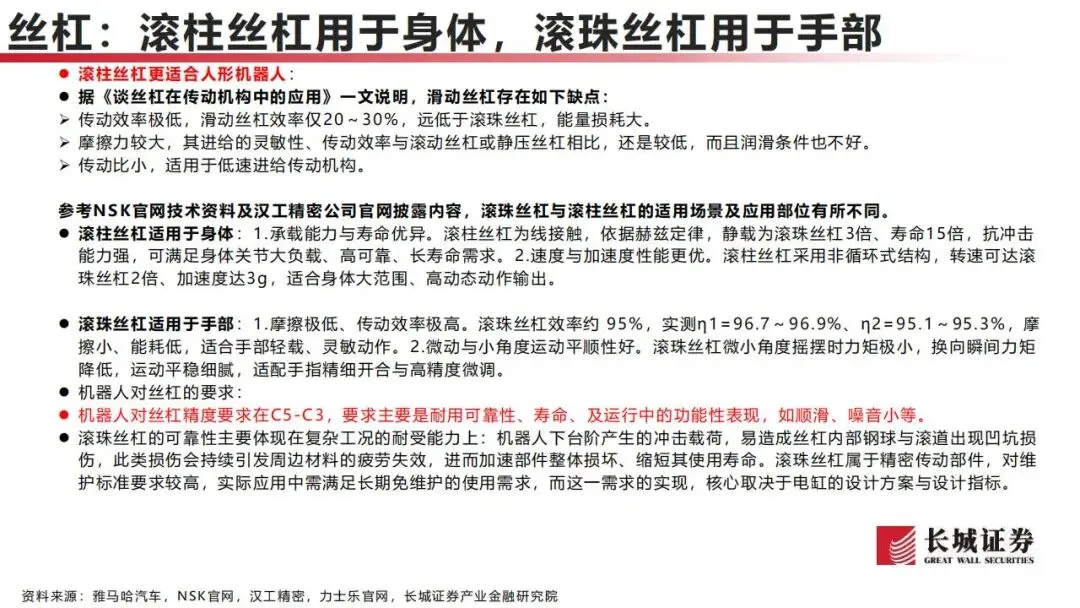
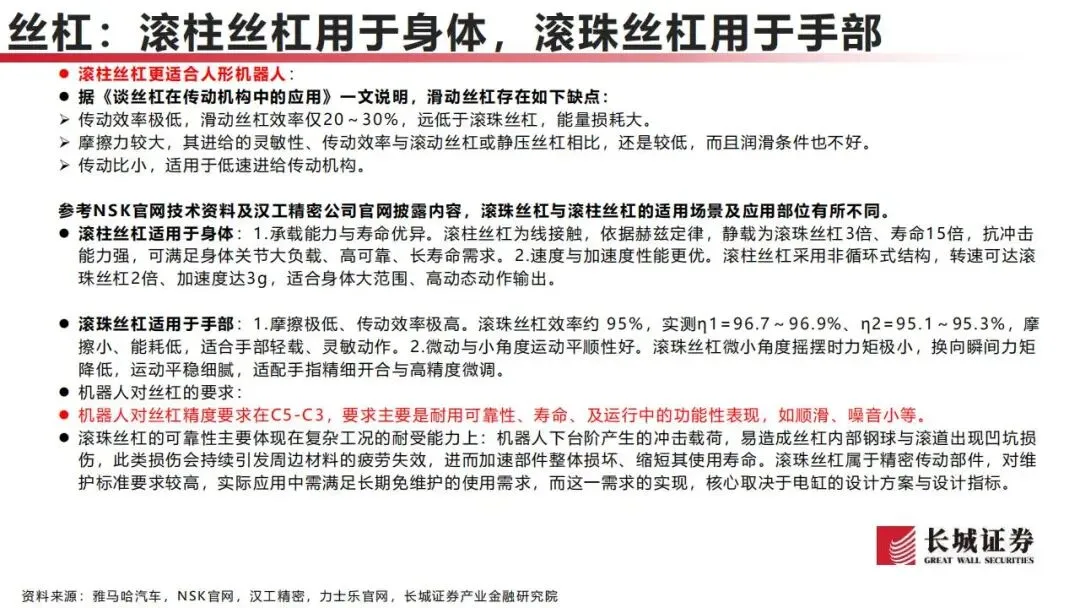
六、灵巧手与丝杠的精密制造
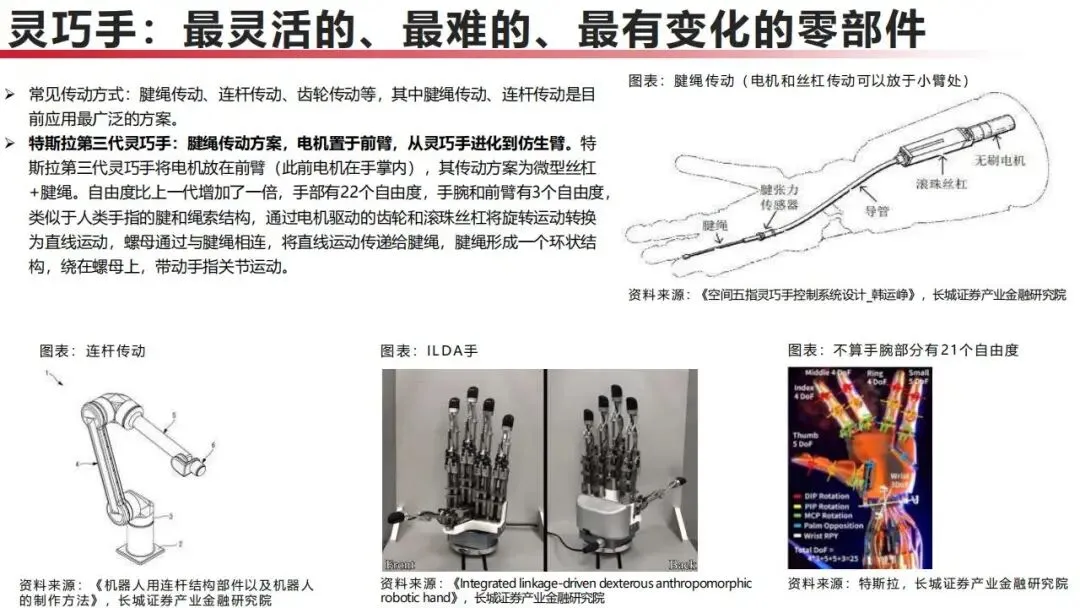
灵巧手是机器人末端执行器中变化最快、复杂度最高的部分。特斯拉第三代灵巧手采用了腱绳传动方案,这种设计将电机置于前臂,通过微型丝杠与腱绳将旋转运动转化为直线运动。这种模拟人类手指腱绳结构的设计,使手部拥有了22个自由度,极大地提升了操作的灵活性。
在线性执行器中,行星滚柱丝杠由于承载能力大、刚度高,成为了核心组件。这种丝杠的制造壁垒极高,需要精密的加工工艺来确保滚柱与螺纹的完美配合。编码器则作为位置反馈装置,实时监控电机的转速和方向。光电编码器因其精度高、不受电磁干扰的特性,成为目前机器人的主流选择。
以上,仅供参考。






扫码加入知识星球获取更多行业报告

声明:本文仅为行业研究与学术交流之用,不构成任何投资建议或操作指引。市场风险客观存在,应基于独立判断与充分调研作出决策。
点击“阅读原文”,下载所有资料