



“机器人行业深度报告:以正合、以奇胜!”由长城证券发布。
本报告共计:47页。完整版PDF电子版报告下载方式见文末。
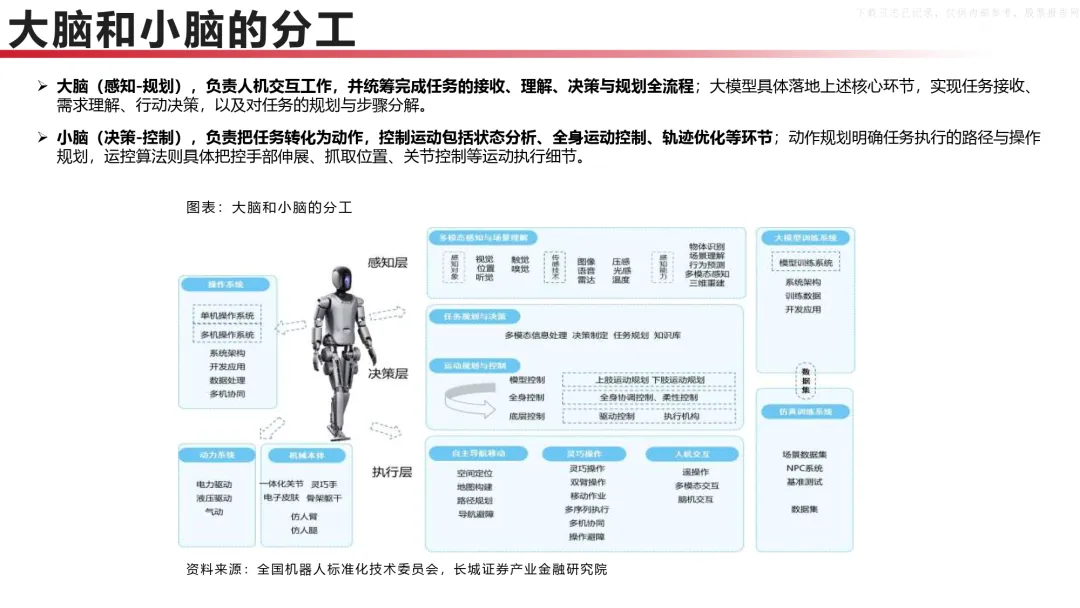
大脑和小脑的分工
大脑(感知-规划),负责人机交互工作,并统筹完成任务的接收、理解、决策与规划全流程;大模型具体落地上述核心环节,实现任务接收、需求理解、行动决策,以及对任务的规划与步骤分解。
小脑(决策-控制),负责把任务转化为动作,控制运动包括状态分析、全身运动控制、轨迹优化等环节;动作规划明确任务执行的路径与操作规划,运控算法则具体把控手部伸展、抓取位置、关节控制等运动执行细节。
执行器:机器人的四肢
执行器=无框力矩电机+减速器or丝杠+传感器+编码器
旋转执行器:T=Kt⋅I,输出力矩 T 与电枢电流 I 成线性正比关系,Kt是扭矩常数(由电机设 计决定)。特斯拉Optimus机器人通过14个线性执行器与14个旋转执行器协同工作,实现 了全身运动的精准控制。
背隙(Backlash):背隙是衡量减速机传动精度的核心性能参数,其定义为当减速机输入端固定时,输出端在施加额定扭矩±2%正反向旋转时产生的微小角位移值,直接影响精密传 动系统的定位精度与响应速度。
齿槽效应:由于永磁电机定子开槽,使得定子和转子之间气隙磁导不均匀,从而引起电机定子和磁极之间产生齿槽效应,引起齿槽转矩。
减速比:减速比,即减速装置的传动比,是传动比的一种.减速器效率通常随减速比增大而降 低,摩擦损耗导致实际输出力矩 T2=η⋅T1 ⋅i(η为效率,减速比i,输出力矩 T ,电枢电流 I )。
幻影视界整理分享报告原文节选如下:

 戳“阅读原文”下载报告。
戳“阅读原文”下载报告。