



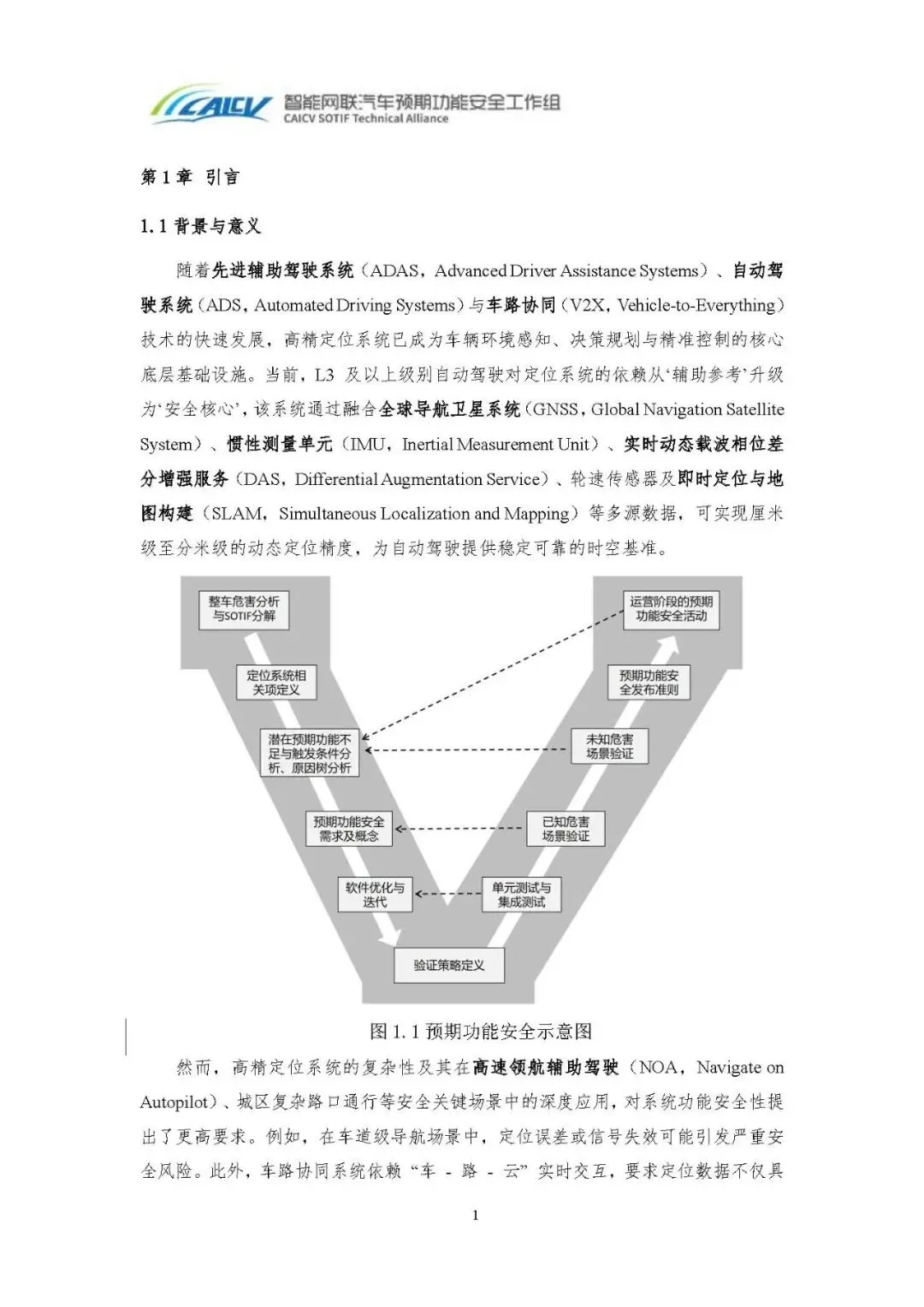
本研究旨在构建高精定位系统预期功能安全的标准化框架,基于V 模型开发流程实现技术研发与行业实践的深度融合,明确高精定位系统核心组件(如GNSS / 北斗单频/ 多频接收机、高精度IMU、差分服务接口)及其性能边界,定义多源数据融合算法(如松耦合/ 紧耦合组合导航)的预期功能安全目标;针对智能驾驶与V2X 场景(如混合交通流、隧道遮挡、多路径干扰),建立定位失效模式库与风险量化模型,保障系统在复杂环境下的功能鲁棒性。
由于篇幅限制,仅展示部分报告,完整报告下载点击文末“阅读原文”。
/* 免责声明:我们尊重知识产权、数据隐私,只做内容的收集、整理及分享,报告内容来源于网络,报告版权归原撰写发布机构所有,如涉及侵权,请及时联系我们删除。*/
推 荐 阅 读
(点击跳转阅读)
长按二维码关注我们


