


欢迎机械工程专业的211、985高校保研与考研的优秀同学加入!
学校个人主页:
https://me.bit.edu.cn/szdw/jsml/zzgcx/szhzzyjs/sssds12/437bd3fbe4a242df83ef1a33a81146a9.htm
导师简介:
王爱民,北京理工大学机械与车辆学院副教授、博士生导师、硕士生导师,于2002年获得清华大学机械制造及自动化专业工学博士学位,2005年从清华大学国家CIMS工程技术研究中心博士后出站,随后在北京理工大学数字化制造研究所工作至今。长期从事基于可重构制造系统、并行工程和精益生产等先进制造理论的智能制造执行系统与优化调度(MES&APS)、自适应智能加工系统、超声振动特种加工装置与工艺等方面的研究,作为项目负责人承担了国家自然科学基金、总装预研、国防基础科研以及企业技改等项目50多项,与航天、航空、兵器、舰船、电科等30余家军工单位建立了长期的密切合作关系。近几年发表论文被SCI/EI收录150余篇,获国防科技进步二等奖2项/三等奖2项、机械工业联合会二等奖1项、电子学会二等奖1项,出版《制造执行系统(MES)实现原理与技术》专著1本。
联系方式:
邮箱:wangaimin99@tsinghua.org.cn
微信号:TimePatient
主要研究方向介绍:
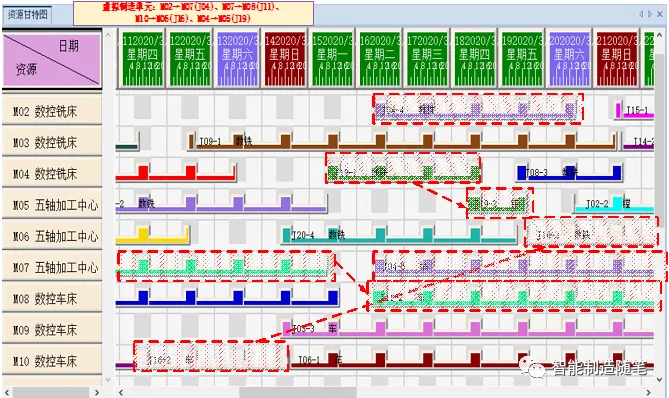
一、计划排产与动态调度(APS)
针对复杂、动态生产环境下的车间作业调度技术进行研究,包括自动调度、人机交互调整、动态调度等技术,解决多关联约束下的自动排产、发挥调度人员经验的交互调度等问题,实现智能生产环境下的基于服务化、实时性的自动、优化作业排产,并能够始终与实际生产保持一致和具有指导性。
后续发展方向:夯实智能排产决策理论与方法研究,发展基于人工智能的第五代APS系统,实现智能制造核心工业软件的自主可控发展。
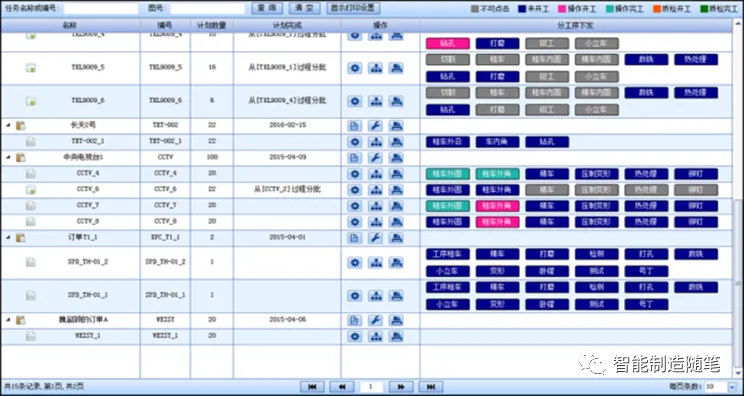
二、智能制造执行系统(MES)
针对多品种、变批量、产研并重、混线生产的实际特点,面向加工/钣焊/电装/装配等复杂大型产品类型建造车间等,开展快速响应制造执行系统的研究,开发软件系统并进行实施应用。同时,结合智能制造的CPS思想,开展工业互联网(RFID及传感)、DNC、MDC、组态控制等方面的研究,实现IT与OT的深度融合,形成一体化信息-物理控制机制。
后续发展方向:提升智能互联制造系统与管控研究,深入利用工业物联网先进技术,发展管理与工艺、制造与自动化等融合运行的新理论,研制服务化互联的智能制造执行系统及装置。
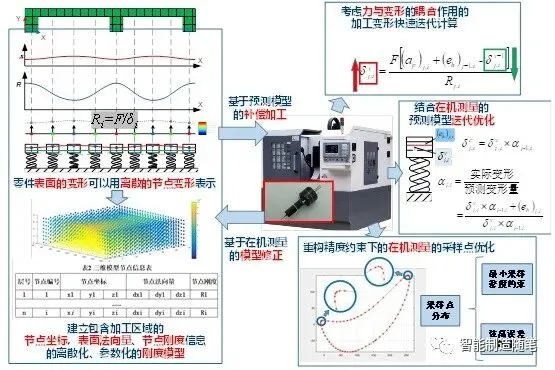
三、面向薄壁件加工变形控制的自适应加工
针对航空航天等大量、普遍存在的薄壁件加工变形控制问题,开展面向薄壁件加工变形控制的自适应加工机理、技术及装置的研究。一是以减少薄壁件加工变形的发生为目标,开展贯穿零件铸造/锻造/热处理/时效/切削加工的仿真分析、振动时效/超声去应力技术及装置、薄壁件结构-刚度分析、薄壁件精度-变形分析等研究,建立面向薄壁件加工工艺参数优化的专家推理系统,形成主轴功率/扭矩传感-推理计算(加工变形知识判断)-数控控制(进给和切深调整)-自适应循环控制的自适应加工控制思路;二是以变形发生后的补偿控制为目标,开展在线/在机加工变形数据采集、点云数据重构与配准算法、图形化补偿分析软件开发、加工变形偏差分析、自动加工补偿设置与执行等技术研究,形成3D测量(接触或非接触)-3D比较(公称模型与实际模型)-推理计算(加工余量、尺寸分配、误差补偿)-数控控制(进给和切深调整)-自适应循环控制的加工变形补偿控制思路。综合上述,结合在线加工变形数据采集及机床数控系统的集成控制技术,研发自适应加工控制装置,并面向工程实际开展应用。
后续发展方向:拓展数字孪生建模与智能装备研究,深入开展基于数字化、智能化和网络化的工艺机理建模仿真及数字孪生的研究,发展各行业关键工艺环节的自适应控形与控性智能加工技术、软件系统和装置。
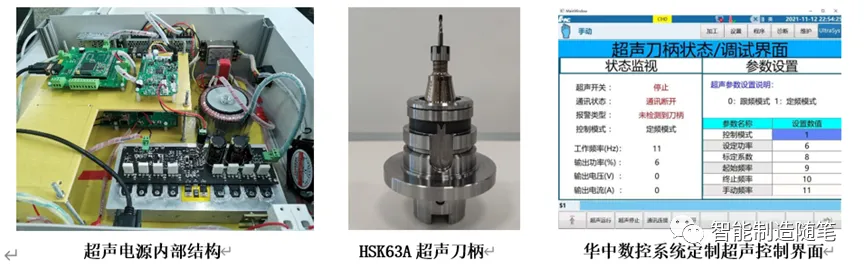
四、超声振动加工
超声振动加工是当前面向硬脆材料高效精密加工的首选方式,在航空、航天等领域具有广泛的应用。本课题组系统开展了超声发生电源、换能器、变幅杆等装置研究与工艺试验方面的研究,具有良好的基础,后续将在装置的小型化、精密化、工程化方向进行拓展。
后续发展方向:探索超声振动加工数字化自适应控制技术,提升超声振动表面强化、等技术及其数字化工艺控制能力,为军工装备研制提供专用机床和机器人等装置。
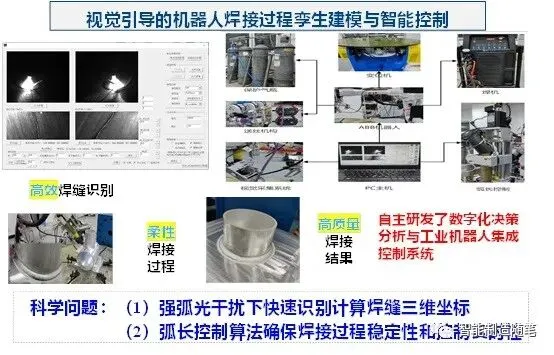
五、基于机器视觉的工业机器人集成应用
基于机器视觉与点云扫描的工业机器人智能划线集成应用技术研究:涉及到三维工件扫描、点云重构、余量优化与配准分析、机器人末端执行器、自动执行等;基于机器视觉的机器人智能切割打磨制造单元、涉及到工件及其切割、打磨姿态的快速识别、机器人集成控制等。
后续发展方向:开拓基于机器视觉的工业机器人集成应用领域,提升工程应用水平。
----------------------------------------
欢迎咨询,欢迎推荐。
本招生宣传长期有效。
----------------------------------------
作者信息:王爱民,工作于北京理工大学数字化制造研究所,长期专注专注于智能制造领域技术研究、系统开发与实施应用。
笔者公众号:智能制造随笔,欢迎关注。
欢迎交流讨论,探讨合作。
微信号:TimePatient