


梳理人形机器人产业链,发现电子皮肤这个环节被严重低估了——它不是锦上添花的配件,是让机器人真正能干活、打通物理AI最后一厘米的核心。没有触觉,机器人再能看也拿不住鸡蛋、拧不动螺丝,更别说复杂的工业和家政操作。(文末可下载)
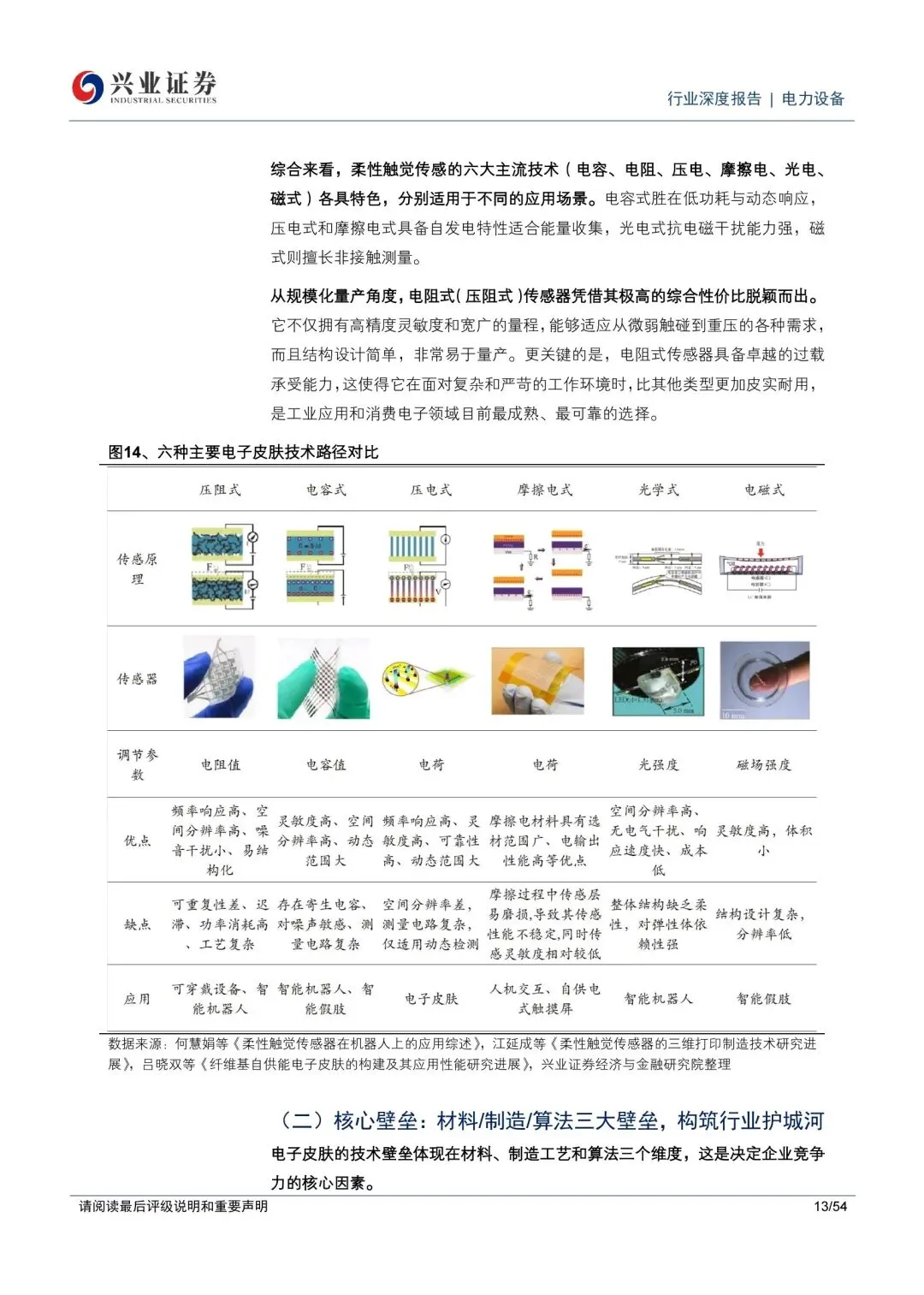
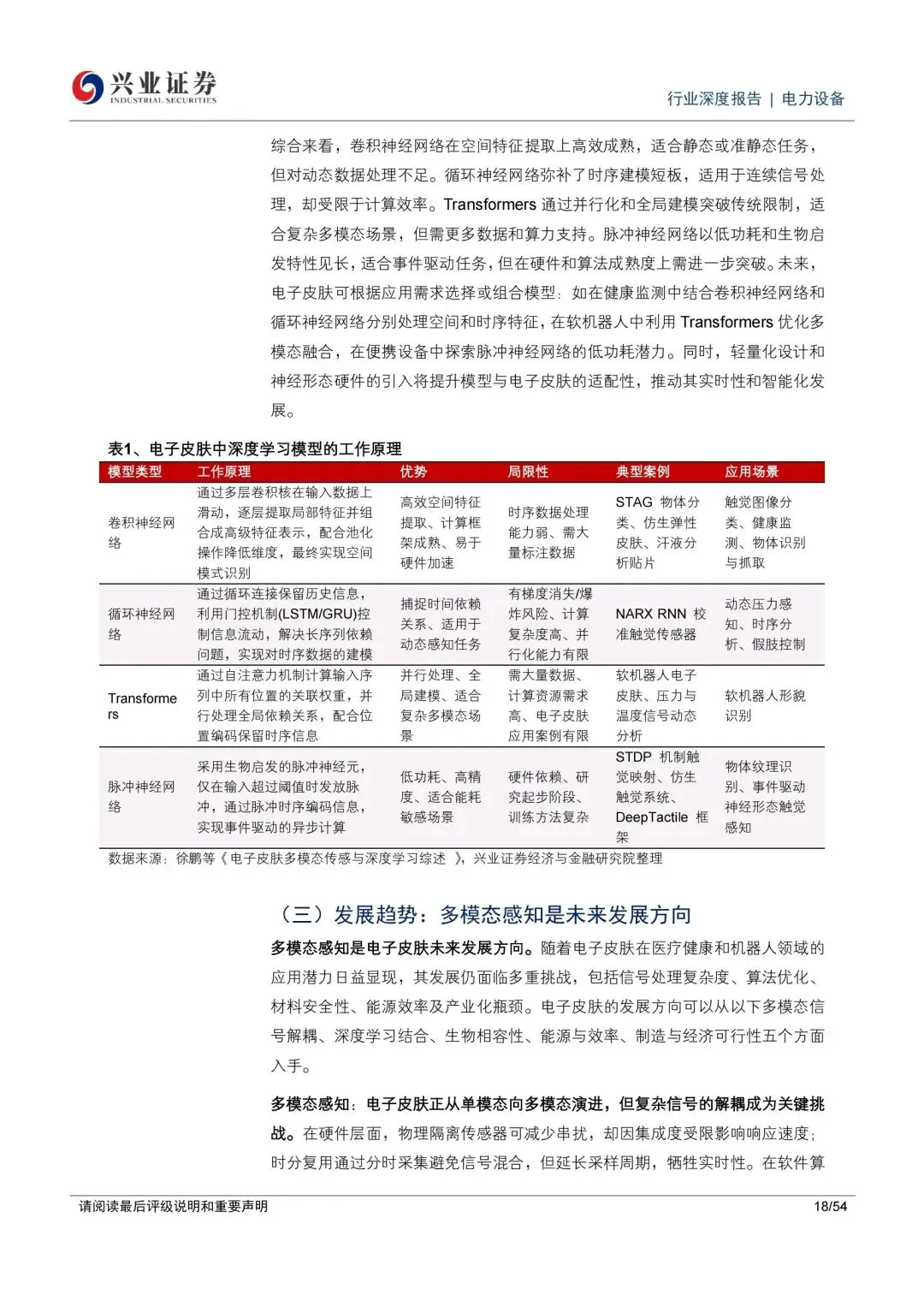
技术路线上,目前主流有压阻式、电容式、压电式等六大方向,综合下来压阻式是现阶段最能打的。它结构简单好量产,过载能力强,工业场景皮实耐用,现在已经落地的产品基本都是这个路线。未来肯定是往多模态走,同时感知压力、温度、湿度,但复杂信号的解耦还是个大坎,短时间很难突破。行业的核心壁垒也很清晰,就是材料、制造工艺和算法三层,缺一不可。
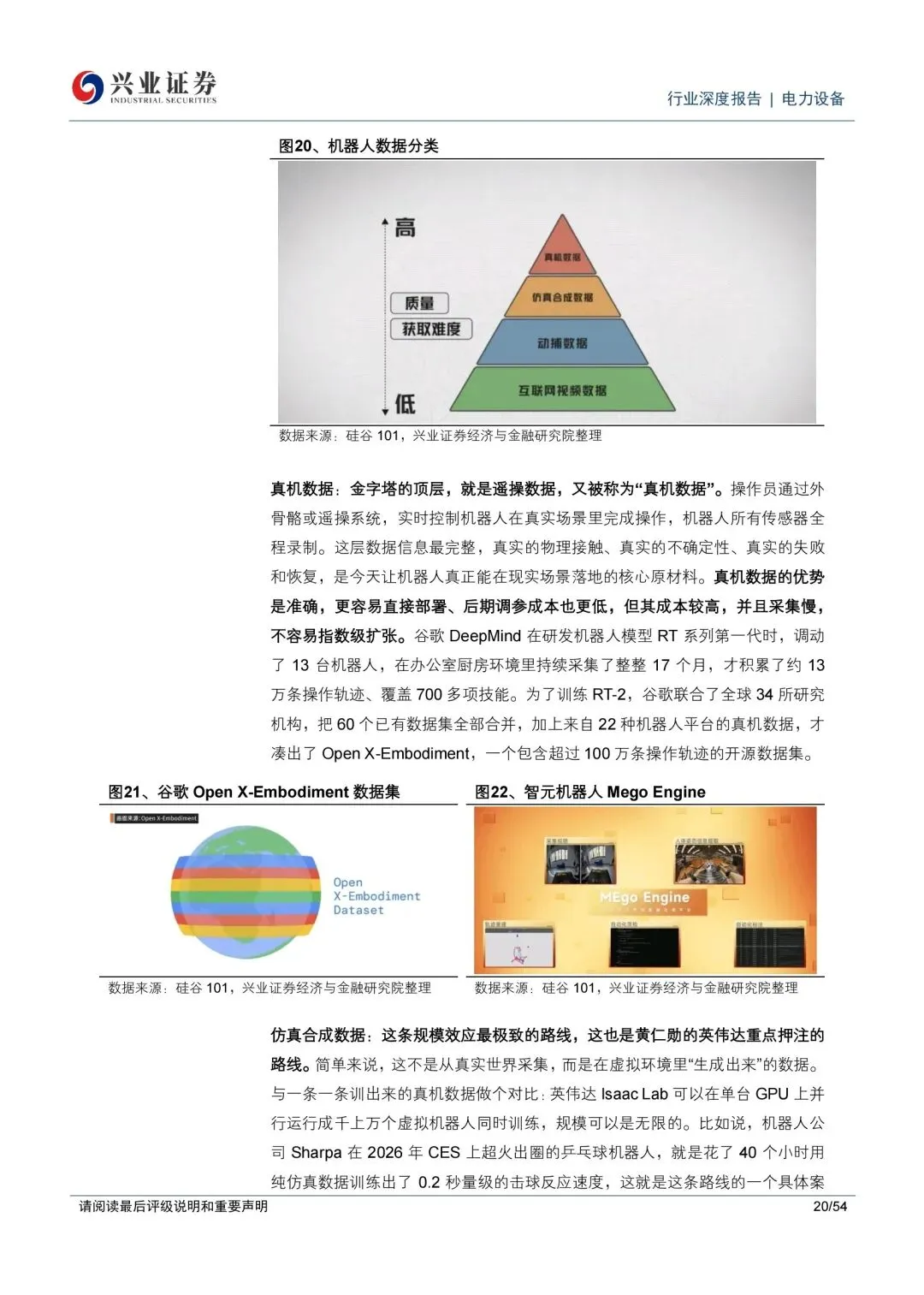
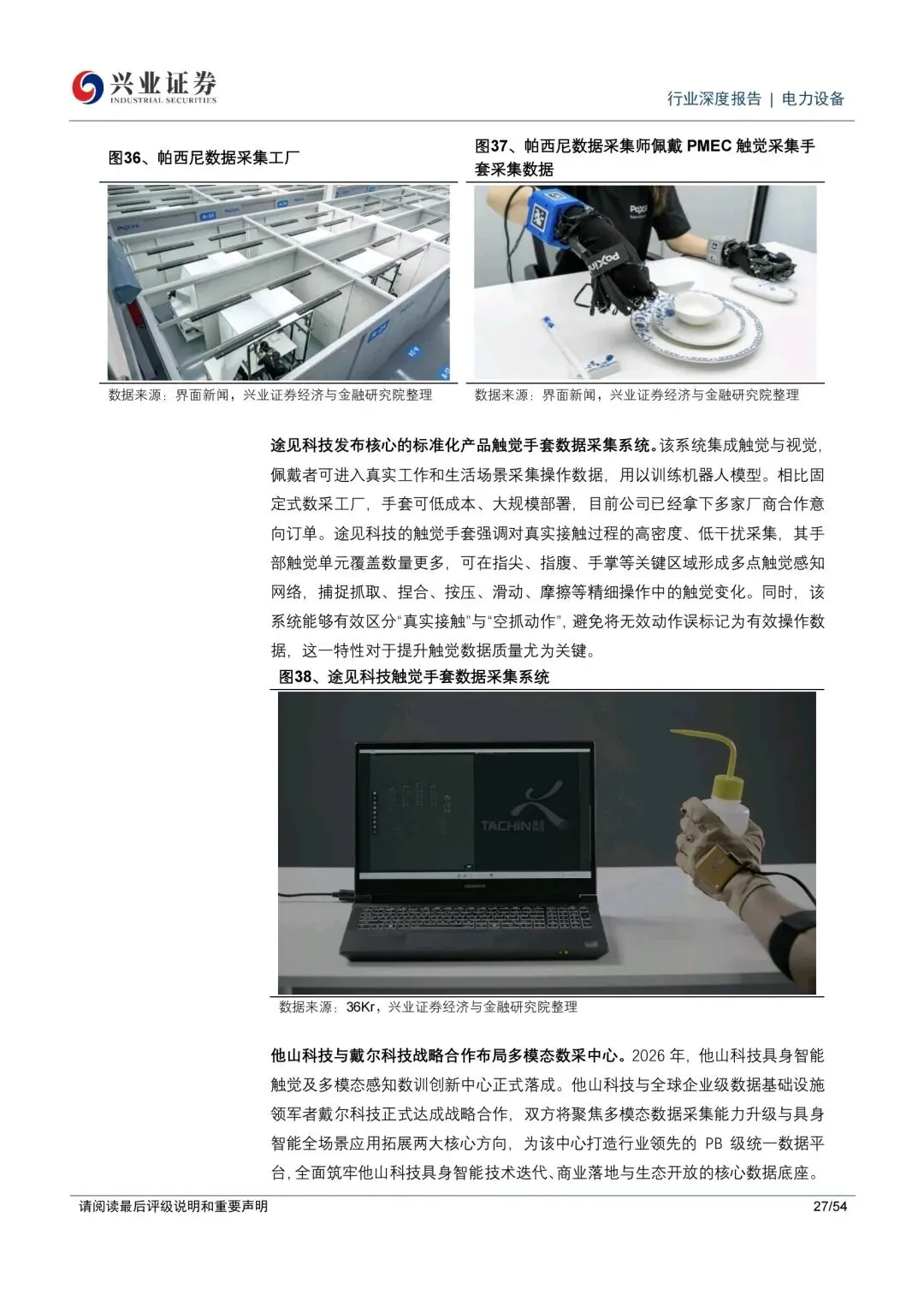
很多人忽略了电子皮肤的第二大需求来源:数据采集。传统真机遥操数据贵的离谱,采集慢还没法规模化,触觉手套直接把数据获取成本砍的只剩10%,还能多模态采集人手的精细动作和触觉反馈。现在帕西尼、灵初智能这些都在建标准化数据工厂,触觉手套的需求爆发其实比机器人本体还要快,这也是电子皮肤市场超预期的核心逻辑。
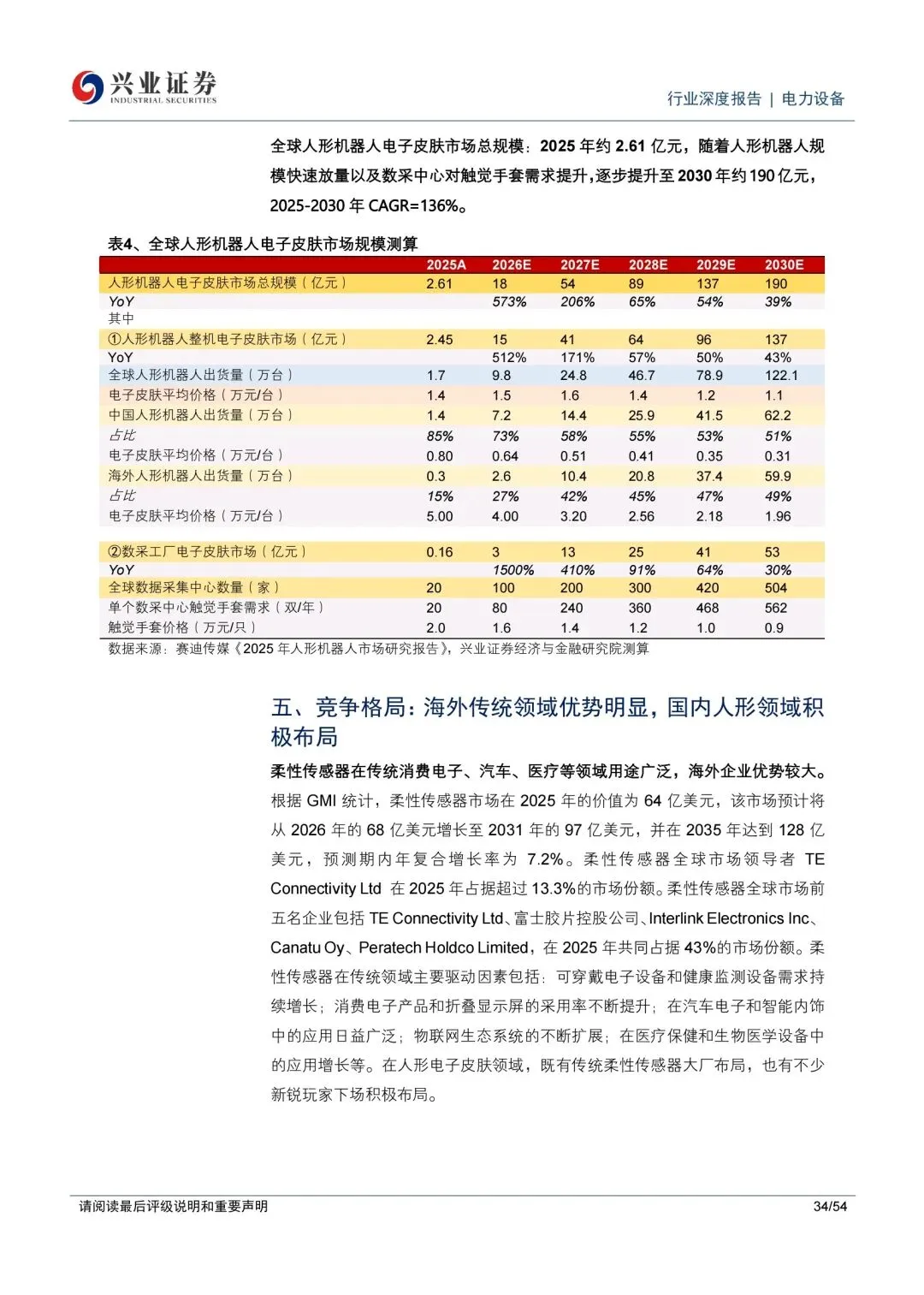
市场增速非常夸张,2025年全球电子皮肤市场才2.61亿元,2030年能冲到190亿元,复合增速136%。拆分来看,人形机器人本体电子皮肤占137亿,数采中心的触觉手套占53亿。国内现在单台全身电子皮肤7000-8000元,海外是国内的7倍左右,未来随着规模化量产,国内价格能降到3000元上下,降本空间很大。
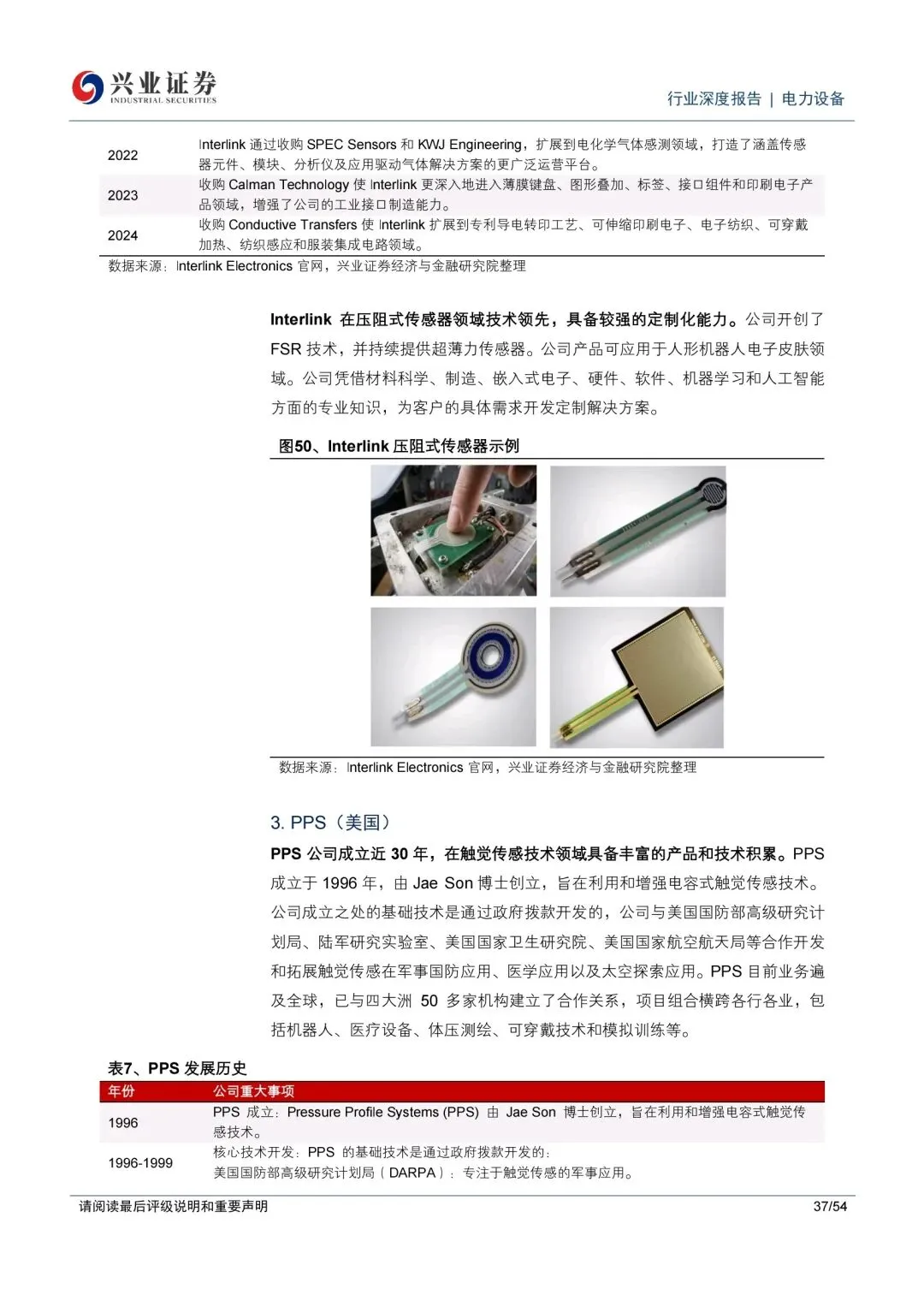
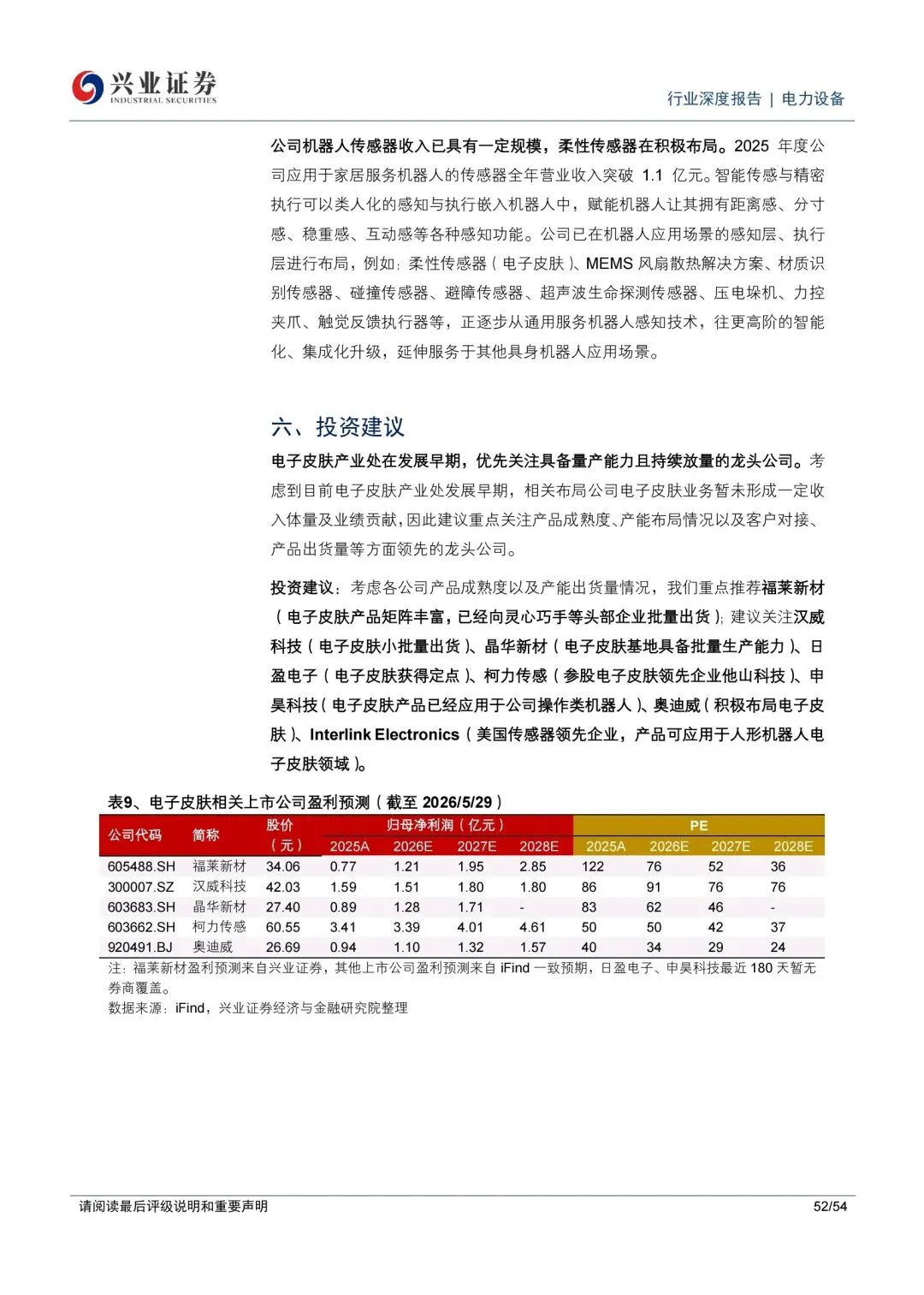
竞争格局上,海外还是传统传感器大厂占优,Tekscan、Interlink这些有几十年技术积累;国内都是新锐玩家冲的很猛,福莱新材已经给灵心巧手批量出货10万套触觉传感器,帕西尼从核心传感器做到整机和全模态数据采集,晶华新材、汉威科技也都实现了小批量出货,现在行业拼的就是量产交付能力和客户资源绑定。
整体看电子皮肤还在产业早期,先落地的肯定是灵巧手部位,再慢慢往全身延伸。现在行业最大的变量不是技术,是降本速度和数据采集的规模化,谁能先把这两个问题解决,谁就能拿到下一波人形机器人的核心门票。




「今日分享:电子皮肤行业专题报告:人形机器人触觉感知的关键,打通物理AI最后一厘米.pdf / 54页 | 原文pdf 文件可下载
声明:报告版权归原创作者所有,仅作学习分享不作商业用途。其他仅为整理时间成本」