


一、核心定义:什么是真正的具身智能?

二、技术底座:十大关键技术构筑核心能力
具身感知:融合视觉、触觉等多模态信息,实现主动、轻量化的环境理解。
具身推理:利用大模型将复杂任务拆解为可执行的原子动作,并具备反思与纠错能力。
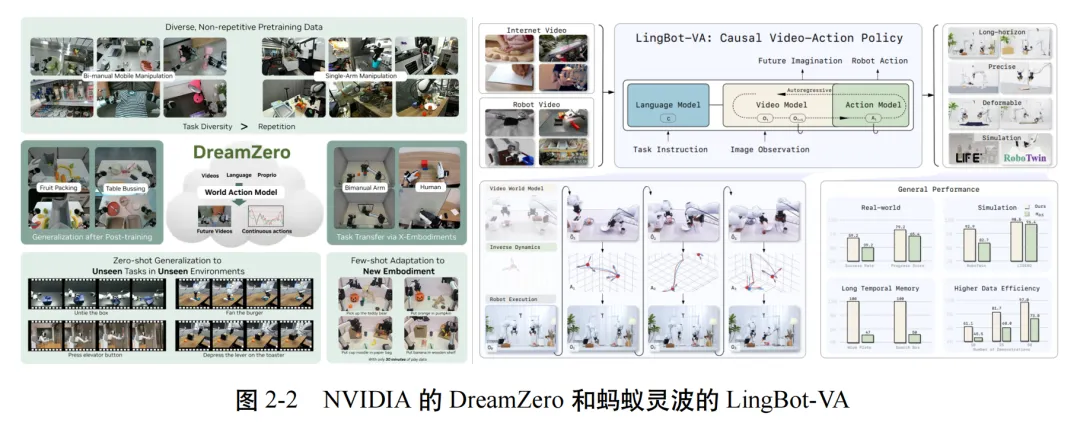
具身操作:核心技术正从VLA(视觉-语言-动作)向WAM(世界-动作模型)跃迁,是具身智能的“灵魂”。
具身导航:从传统的几何导航升级为语义导航,不仅抵达位置,更为后续操作做好准备。
强化学习:作为实现具身智能的核心技术之一,通过试错和奖励机制优化策略。
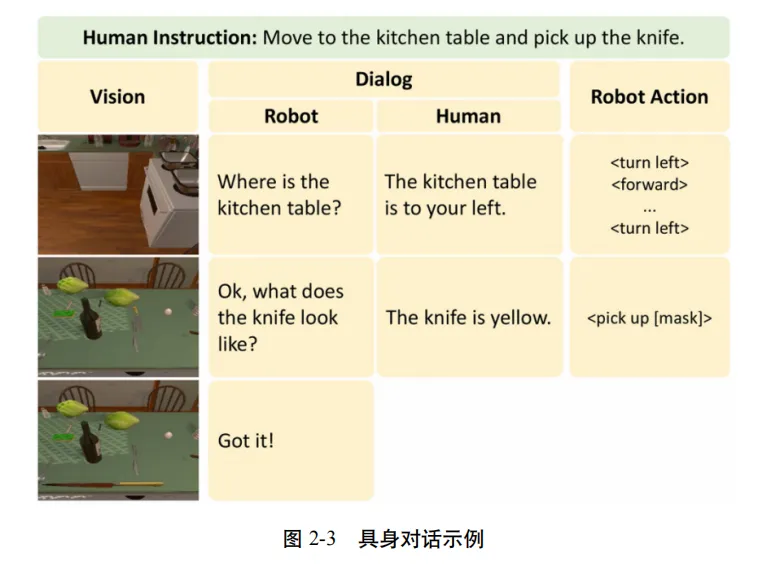
具身交互:包含人机对话、人机在环协同,是医疗、家庭等场景的关键。
群体具身智能:让多机器人像蜂群一样分工协作,完成复杂任务。
具身世界模型:让机器人能在内心“脑补”物理规律,预判动作后果。
三、范式跃迁:从“听话”到“懂物理”的质变
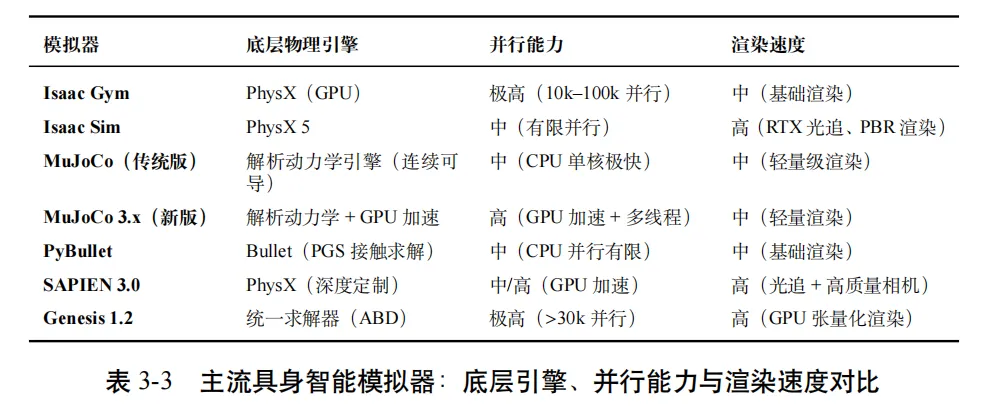
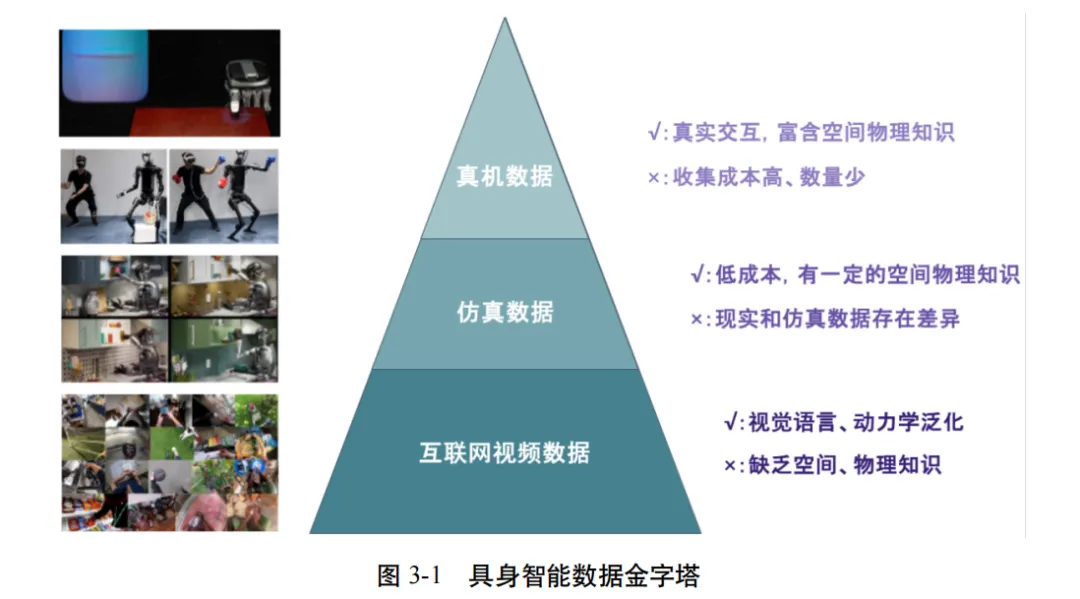
四、基建支撑:数据与平台突破产业瓶颈

五、产业落地:五大场景步入规模化元年
