2025年,当“具身智能”首次写入中国政府工作报告时,一个隐藏在产业光鲜外表下的核心矛盾也随之浮出水面:我们正在用最前沿的技术,试图解决一个最原始的问题——数据从哪来?
这不是危言耸听。行业普遍认为,要实现具身智能的“涌现”,至少需要百万小时来自真实世界的物理互动数据。而截至今天,全球积累的数量尚不足这一目标的5%。
这不是某一家企业的困境,而是整个行业共同面对的“冷启动死结”。
一、从“数字大脑”到“物理身体”:一场跨越边界的远征
过去几年,大语言模型的爆发让人们看到了通用人工智能的曙光。ChatGPT能写诗、能编程、能分析财报——但它只能在屏幕里跳舞。
具身智能的出现,正是要让AI“长出手脚”,走向物理世界。
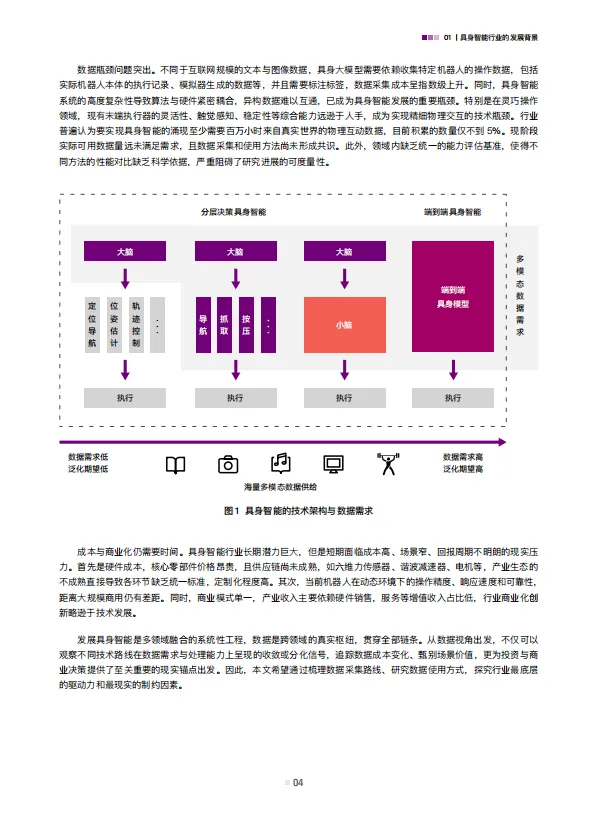
从技术架构看,具身智能构建了一个由大脑(Brain)、身体(Body)与环境(Environment)三者构成的动态耦合系统:大模型为机器人提供任务规划、常识推理和自然语言交互能力;机器人本体则作为大模型在物理世界中的“行动载体”。
这种认知与身体的结合,推动具身智能从执行预设任务的自动化设备,向能够理解开放指令、适应非结构化环境的通用智能体演进。
但问题也随之而来——
当AI从数字世界走向物理世界,它所需的数据类型发生了根本性变化。文本数据可以批量爬取,图像数据可以众包采集,但能让机器人学会“拧瓶盖”“叠衣服”“递水杯”的物理交互数据,从哪里来?
二、数据瓶颈:5%与100%的鸿沟
白皮书揭示了一个残酷的现实:高质量物理交互数据的匮乏,正在成为具身智能发展的核心瓶颈。
与互联网规模的文本与图像数据不同,具身大模型需要依赖:
• 实际机器人本体的执行记录
• 模拟器生成的物理仿真数据
• 多模态标注的交互轨迹数据
更棘手的是,具身智能系统的高度复杂性导致算法与硬件紧密耦合,异构数据难以互通。灵巧操作领域更是重灾区——现有末端执行器的灵活性、触觉感知、稳定性等综合能力,远逊于人手。
一句话概括:互联网AI用“屏幕数据”训练,具身智能需要用“物理经验”训练——而后者的采集成本,前者是数量级的差距。
三、三条路径:行业正在如何“喂养”机器人
面对数据饥渴,行业已经摸索出三条主要的数据采集路径:
1. 遥操作数据:最直接,但成本最高
遥操作(Teleoperation)通过人类操作员直接控制机器人完成动作,同时记录完整的“感知-决策-执行”数据链。这是最直接的高质量数据来源,也是当前的主流方案。
典型代表是斯坦福大学的ALOHA系统(A Low-cost Open-source Hardware System for Bimanual Teleoperation),通过关节复制开创了低成本、高性能双臂遥操作范式。
但代价是:硬件成本高、采集速度慢、规模扩展困难。一台能采集高质量数据的双机械臂系统,硬件成本动辄数十万元。
2. 动作捕捉数据:性价比之选
动作捕捉方案利用专业设备记录人体动作,再映射到机器人身上。相较于遥操作,数据采集效率更高,成本更低。
诺亦腾等国内厂商的光惯融合方案,能够实现高精度的手指动作捕捉;帕西尼感知的多维触觉灵巧手集成了近2000颗自研传感器,可采集压感、摩擦、软硬质地等15种多维触觉感知数据。
3. 互联网视频+合成数据:规模最大,但“物理真实性”存疑
互联网视频数据规模庞大、成本低廉,但直接用于机器人训练存在“物理真实性”问题——视频中的人类动作未必符合机器人的运动学约束。
合成数据则通过仿真引擎批量生成,解决了规模问题,但在复杂物理交互场景下的逼真度仍有提升空间。
三条路径各有利弊,行业的共识是:组合使用,互补长短。
四、自动驾驶踩过的坑,具身智能能避开吗?
值得庆幸的是,具身智能并非摸着石头过河——自动驾驶行业的数据经验,是最直接的参照物。
从高精地图说起
早期自动驾驶企业迷信“完美数据”,投入大量资源绘制厘米级高精地图。但当企业走向泛化场景时发现:依赖单一数据源的战略,反而成了能力的边界。
教训是:数据不是越多越好,数据的“有效性”和“适配性”比规模更重要。
数据驱动闭环:从仿真到真机
自动驾驶的数据策略正在从“纯真机采集”转向“仿真优先,真机验证”的混合模式。仿真环境可以低成本生成海量场景数据,真机数据则负责校准“物理真实性”的偏差。
这对具身智能的启示是:构建“仿真-真机”双轨数据体系,可能是突破数据瓶颈的关键路径。
但问题在于,具身智能的仿真环境构建难度远超自动驾驶——物理世界的精细操作、柔性物体的交互、开放环境的适应性,都对仿真引擎提出了极高要求。
五、数据飞轮困境:先有鸡还是先有蛋?
在具身智能领域,存在一个经典的“先有鸡还是先有蛋”困境:
没有足够的数据,就训练不出好模型;没有好模型,就做不出能干活的产品;做不出产品,就无法通过实际部署积累更多数据。
这个困局不解决,具身智能永远停留在Demo阶段。
但行业正在探索破局之道:
• 智元机器人提出ADC(对抗数据采集)模式,通过增加数据的信息密度,以20%的数据量达到传统方案2.7倍的效果
• HIL-SERL系统通过“Human-in-the-Loop”强化学习,让机器人在1-2.5小时内学会多种高精度操作,成功率接近100%
核心思路是:不是盲目追求数据规模,而是提升每一条数据的“信息密度”和“任务适配性”。
六、商业化渐进路径:一场与数据深度绑定的马拉松
白皮书将具身智能的商业化路径划分为三个阶段:
第一阶段(当前):小数据证明工程价值
聚焦具体行业、解决确定性问题、创造可计算的ROI。在工业精密装配、仓储柔性物流、商业清洁等领域,先用少量数据证明“机器人能干活”。
这是目前最具商业明确性的路径,也是多数企业的生存策略。
第二阶段:深耕场景,建立壁垒
当第一阶段积累足够多的场景数据后,企业开始建立专属的数据标注规范、场景特征库和性能基准,通过大量数据驱动算法迭代,建立垂直行业的竞争壁垒。
第三阶段:通用智能的星辰大海
当海量数据与前沿算法相结合,具身智能将具备跨任务、跨场景、跨形态的泛化能力。高阶功能的拓展,可能催生“智能即服务”的商业模式——用户可以像在应用商店购买软件一样,订阅机器人的特定技能包。
但这个阶段需要多久?行业普遍预期:十年以上。
七、世界模型:通往具身“GPT-3.5时刻”的潜在路径
2026年初,一个新概念正在点燃行业的想象力——世界模型。
世界模型被认为是补足机器人“物理直觉”的关键拼图。不同于大语言模型在数字世界学习规律,世界模型让机器人能够:
• 预测下一个状态
• 想象执行动作后的未来画面
• 模拟不同策略的预期结果
近期突破令人振奋:
• 蚂蚁灵波发布的LingBot-VA模型,在LIBERO基准测试中任务成功率高达98.5%
• 生数科技联合清华开源的Motus,在50项通用任务测试中,较国际顶尖方案提升35%
• 英伟达与斯坦福联合发布的Cosmos Policy,在挑战性任务中成功率提升12.5%
但世界模型仍处于早期探索阶段。长时序预测的误差累积、物理一致性保持、实时推理效率等问题尚未解决。
八、全球竞赛:政策、资本与战略博弈
当业界还在讨论技术路线时,各国政府已经用真金白银给出了答案:
国家 | 主要政策 | 投入规模 |
美国 | 《国家机器人计划3.0》 | 1400万美元 |
中国 | 《人形机器人创新发展指导意见》 | 列入政府工作报告 |
欧盟 | 《地平线欧洲》机器人项目 | 1.985亿美元 |
德国 | 《2025高科技战略》 | 3.45亿美元(至2026年) |
日本 | 《机器人新战略》 | 9.305亿美元 |
韩国 | 《第三版智能机器人发展计划》 | 1.722亿美元 |
2025年,中国首次将“具身智能”写入政府工作报告,将其列为未来产业重点发展方向。这一战略定位,释放了明确的信号:具身智能不仅是科技竞赛,更是关乎国家竞争力的战略高地。
资本的嗅觉同样敏锐。据白皮书统计,截至2025年9月,国内具身智能领域投资事件数近500起,融资总额已超300亿元人民币。投资方向遍及机器人硬件制造、核心软件算法、开发工具平台与垂直领域解决方案。
九、机遇与挑战:冷静审视产业周期
值得期待的方向
1. 感知技术创新:从“被动采集”到“感算一体”,智能传感器正成为多模态数据的核心入口
2. 数据治理平台:标准化、规模化的数据采集与治理服务,正在成为行业基础设施
3. 垂直场景深耕:聚焦封闭、高危、长期有害等场景的垂直解决方案,有望率先实现商业闭环
4. 真机失败数据的价值:负面样本对模型能力提升同样重要,智元机器人的实践已证明这一点
必须正视的风险
1. 技术路径的不确定性:端到端vs模块化vs世界模型,路线之争远未终结
2. 数据可用性验证的隐性成本:让数据真正“可用”,需要全链路系统性投入
3. 数据安全与伦理监管:多模态数据采集面临隐私合规的全新挑战
4. 商业化进程的漫长周期:Demo到量产,中间隔着十万八千里
十、写在最后:一场关于未来智能基石的布局
站在2026年的当下回望,我们正在见证一场比互联网革命更为深远的变革。
具身智能从来不是单纯的机器人产业,它是人工智能从数字世界的“认知智能”向物理世界的“行动智能”的跨越。
这场跨越的关键,不在于算法有多先进、芯片有多强大,而在于能否解决那个最原始、最朴实的问题:如何高效地获取、处理和利用物理世界的交互数据。
数据是跨领域的真实枢纽,贯穿具身智能的全部链条。从数据视角出发,我们可以观察不同技术路线的收敛或分化,追踪数据成本变化,甄别场景价值。
通往这一未来的道路,注定漫长而艰辛。
这不会是一次ChatGPT式的突变,而是一场以五年、十年、二十年为尺度的渐进式演进。
最终,最大的赢家,很可能不仅是技术的领先者,更是那些能深刻理解产业节奏、精准定位自身生态位,并能在复杂风险中构建起持续迭代能力和强大商业护城河的企业。
具身智能的数据战争,才刚刚开始。