





《中国人工智能系列白皮书—具身智能(2026版)》由中国人工智能学会编著,系统阐述了具身智能的概念内涵、关键技术、数据集与平台、行业应用及未来发展趋势,强调其作为人工智能下一个爆发点的重要地位及在国计民生中的重大应用价值。
具身智能的概念与内涵
- 概念定义
:具身智能是人工智能领域的重要研究方向,专注于智能体通过物理本体与外界环境互动来实现智能的理论与技术,涵盖环境感知、记忆推理、对话交互、自主学习、决策规划、动作执行等,具有涉身性、情境性、主动性和交互性特点,是人工智能走向物理世界的核心关键。 - 发展历史
:起源于1950年图灵《计算机器与智能》的构想;20世纪80年代行为主义AI学派强调感知与动作协同;深度学习和强化学习等算法及硬件进步推动其快速发展,如特斯拉Optimus;近年来大语言模型兴起,如谷歌RT系列、Meta的CortexBench和VC-1模型、英伟达GR00T和Jetson Thor等,使其进入新高潮。 - 多学科交叉特性
:跨越哲学、认知与神经科学、计算机科学、机器人学等学科。哲学上亚里士多德思考心灵与身体关系;认知科学发展具身认知理论;神经科学对镜像神经元研究强化群体交互作用;机器人学通过构建机器人发现智能行为可通过与环境直接交互实现;复杂系统领域从演化和信息论角度研究智能体行为。 - 具身虚实结合现状
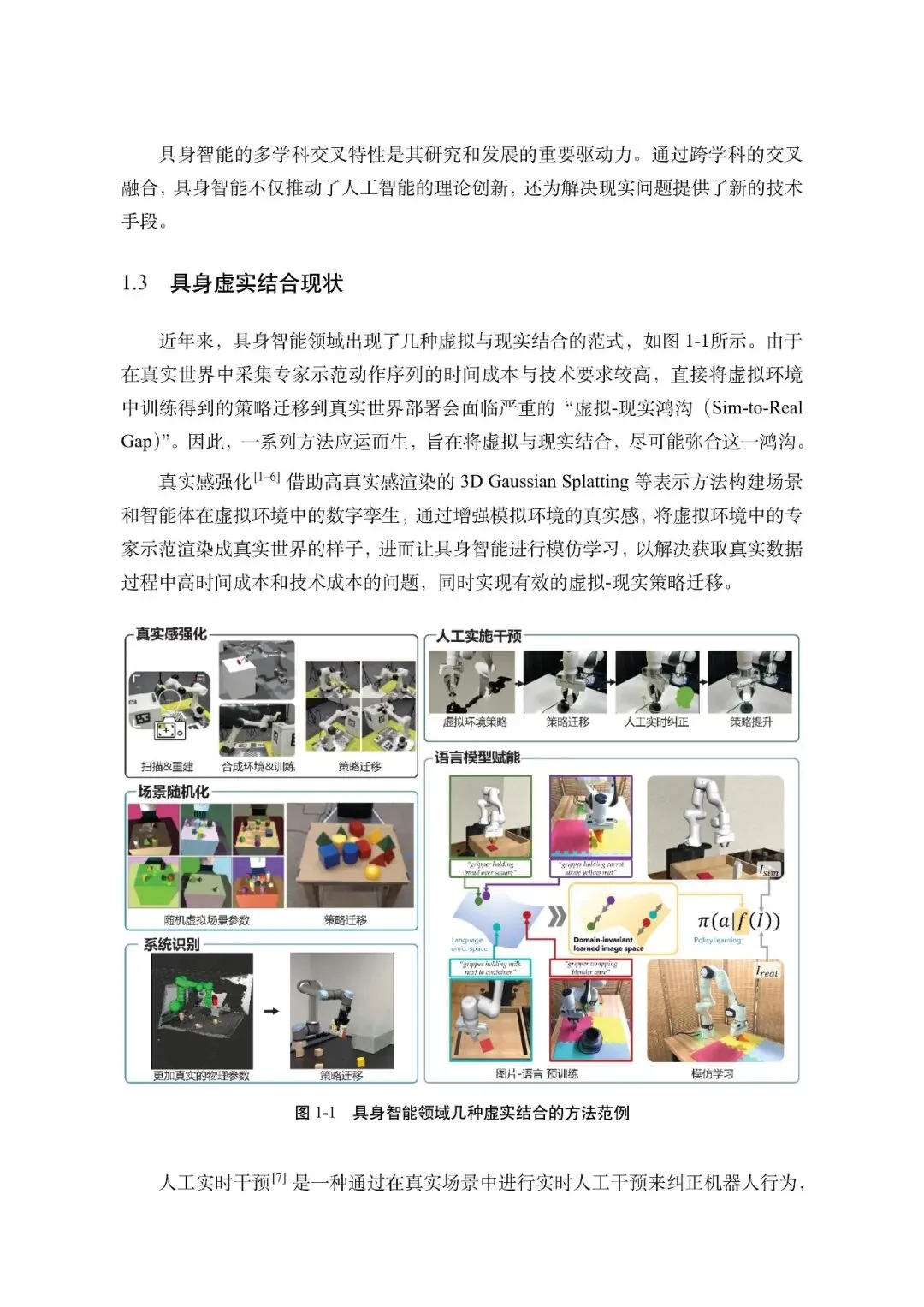
:存在真实感强化、人工实时干预、场景随机化、系统识别、语言模型赋能等范式,以应对“虚拟-现实鸿沟”,如利用3D Gaussian Splatting构建数字孪生、训练残差策略、随机化参数、构建精确数学模型、以自然语言为桥梁提升泛化能力等。
具身智能的关键技术
- 具身感知
:是深嵌于动作-感知闭环的动态过程,需应对单点观测局限、环境干扰、动态变化和算力限制等挑战。包括主动感知与探索(如调整姿态获取信息、MP5算法、ActiveGAMER等)、多模态感知融合(如整合视觉语义等多源数据、非视域成像技术、Metasensor架构等)、动态环境自适应(如在线学习和迁移学习)、轻量化研究(如层级化提前退出机制、硬件底层优化)。 - 具身推理
:指智能体通过多模态感知实时捕捉环境状态,融合目标与经验分解任务、动态修正错误的认知框架。早期基于符号推理和规则系统,近年结合大语言模型,在语义理解与目标分析(将模糊指令转化为明确目标)、原子动作分解(如SayCan方法规划行动序列)、反思与调整(如ReAct、Text2Motion、VLP、REFLECT框架等)方面发挥作用,还出现代码生成范式如Code-as-Policies、RoboCodeX等。 - 具身操作
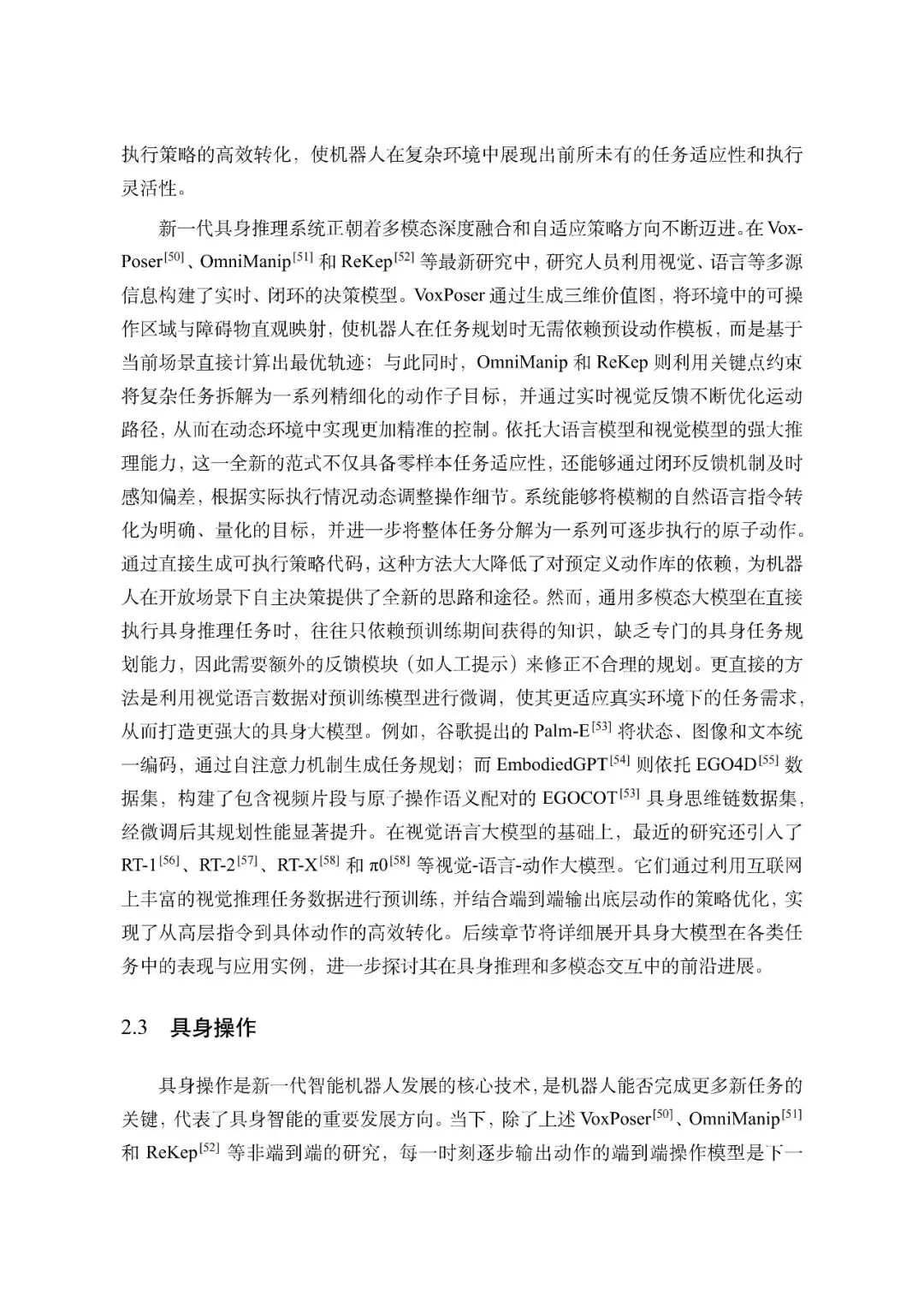
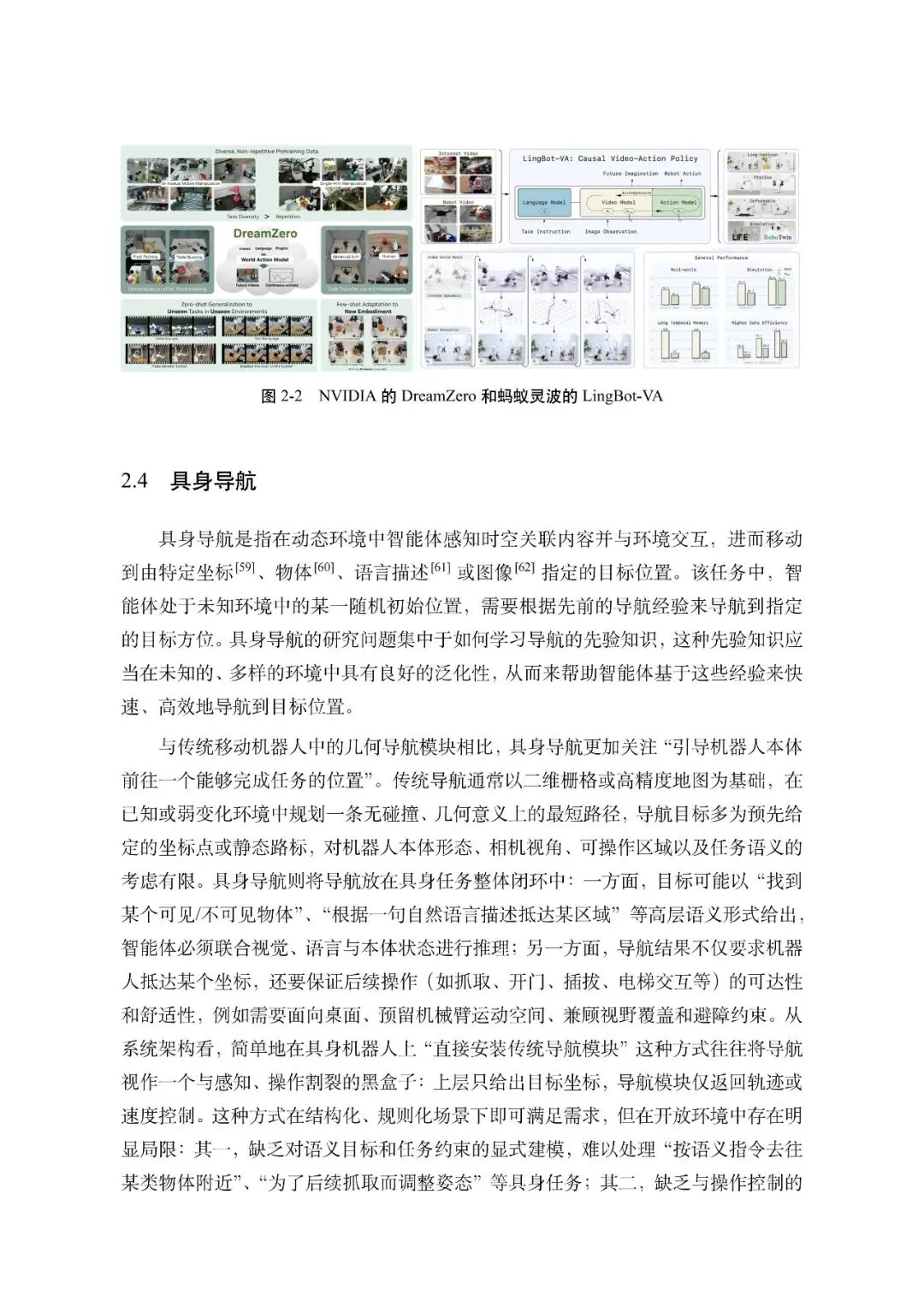
:是新一代智能机器人核心技术,端到端操作模型是主流方向,视觉-语言-动作大模型(VLA)为通用解决方案,2026年世界动作模型(WAM)成为热点。VLA有基于VLM+动作模型、VGM+动作模型、VLM+Latent+Action三种技术路线,如Physical Intelligence的π0模型、清华大学RDT模型、字节跳动GR-2模型、智元ViLLA模型等;WAM对动作-下一个状态分布建模,如Nvidia DreamZero、蚂蚁灵波科技LingBot-VA。 - 具身导航
:指智能体在动态环境中感知时空关联内容并交互,移动到指定目标位置。与传统导航相比更关注任务可达性和舒适性,系统架构多通过端到端或模块化学习。学习可泛化导航经验的方法有需要训练(端到端强化学习、模块化学习)和免训练(基于VLM或LLM)两类,还通过端到端微调大语言模型提升真实环境导航性能,研究方向向开放导航等更复杂场景延伸。 - 强化学习
:是实现具身智能的核心技术之一,在导航(如NoMaD框架、NWM框架)、操作(如结合VLA模型、RoboCat、HumanPlus)、运动控制(如腿足机器人和飞行控制、AMP算法、HugWBC框架)、交互(如Amazon Robotics仓库系统、RHINO框架)等任务中提供技术支持,推动机器人自主决策和环境适应发展。 - 具身交互
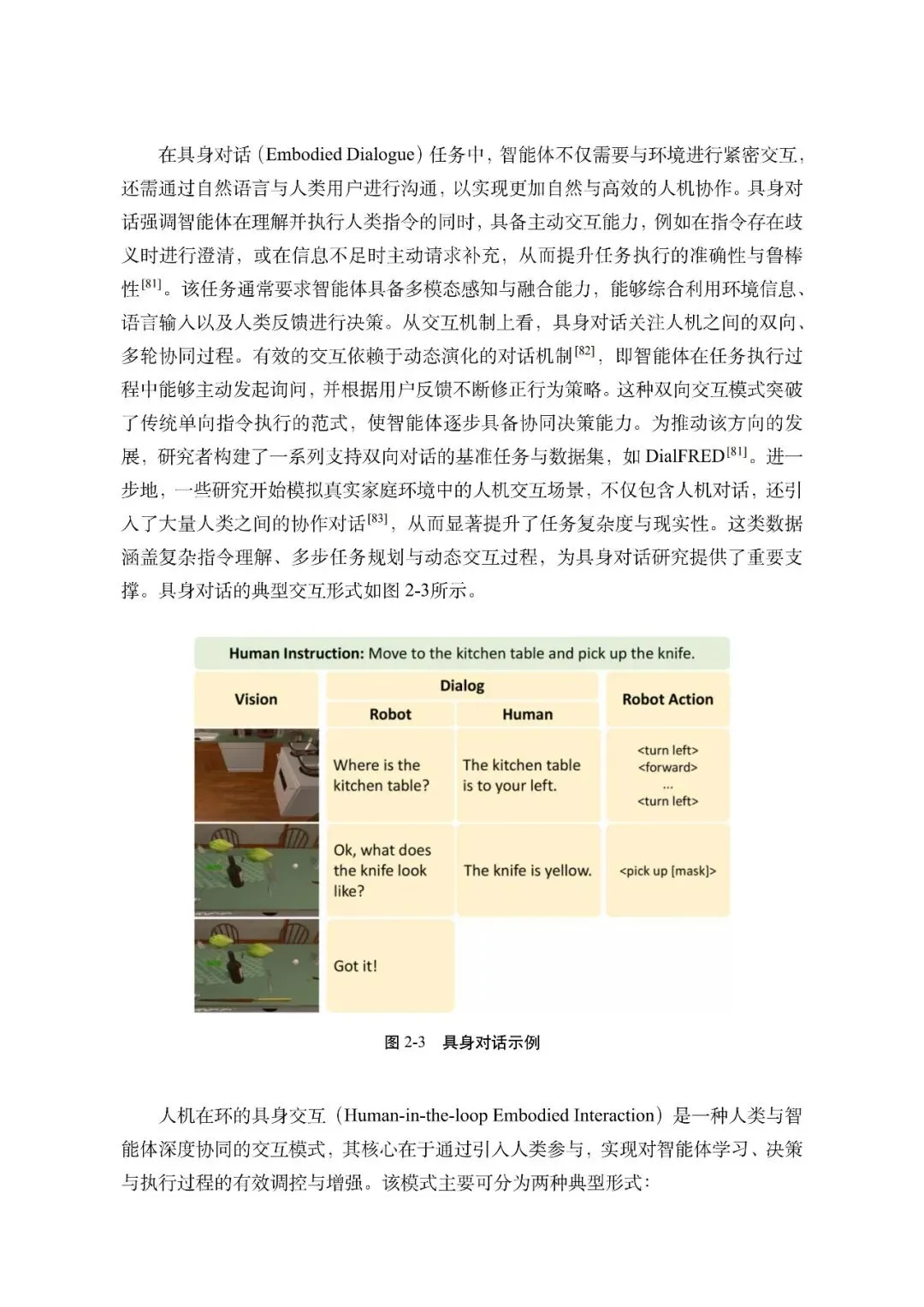
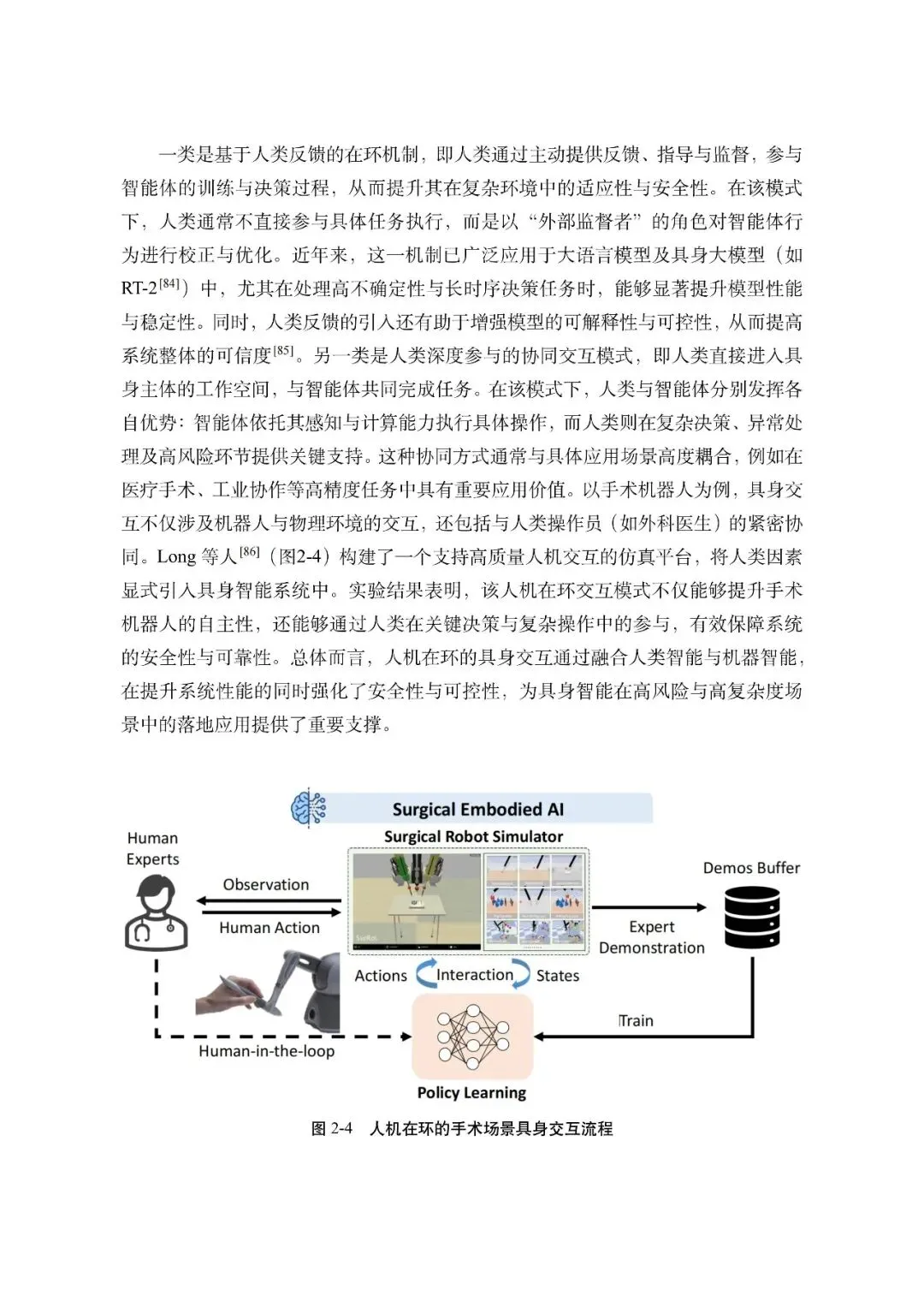
:由保罗·杜里什于2001年提出,内涵拓展为具身主体与物理环境交互及人机在环交互。具身主体与环境交互通过“感知—决策—行动—反馈”闭环优化策略;具身对话需与人类沟通,具备主动交互能力,有DialFRED等数据集;人机在环交互包括基于人类反馈的在环机制和人类深度参与的协同交互模式,如手术机器人场景。 - 群体具身智能
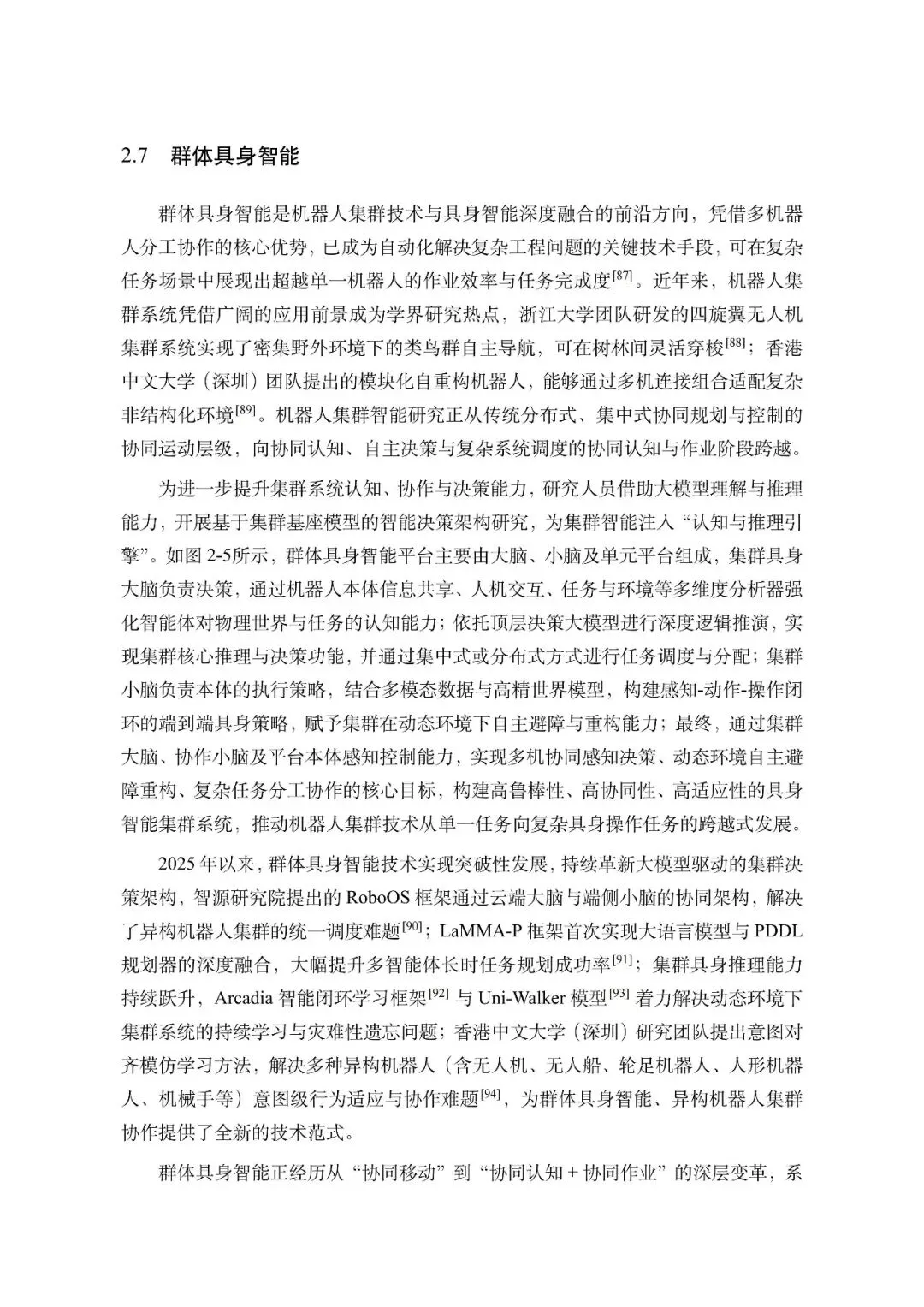
:是机器人集群技术与具身智能融合的前沿方向,平台由大脑、小脑及单元平台组成,集群大脑负责决策,小脑负责执行策略。2025年以来有RoboOS框架、LaMMA-P框架、Arcadia智能闭环学习框架等突破性发展,正从“协同移动”向“协同认知+协同作业”变革,未来研究方向包括知识图谱与大模型耦合等。 - 具身世界模型
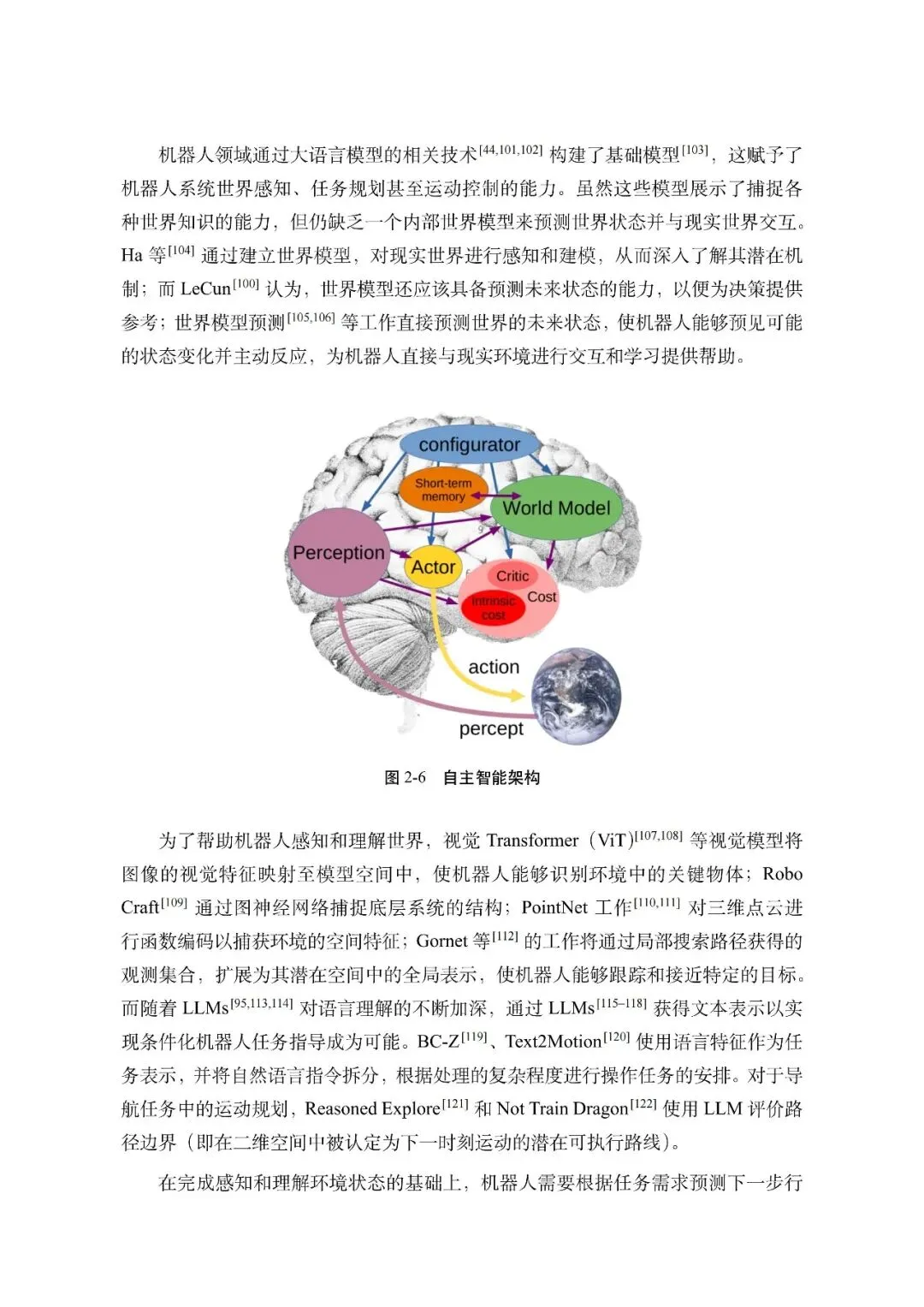
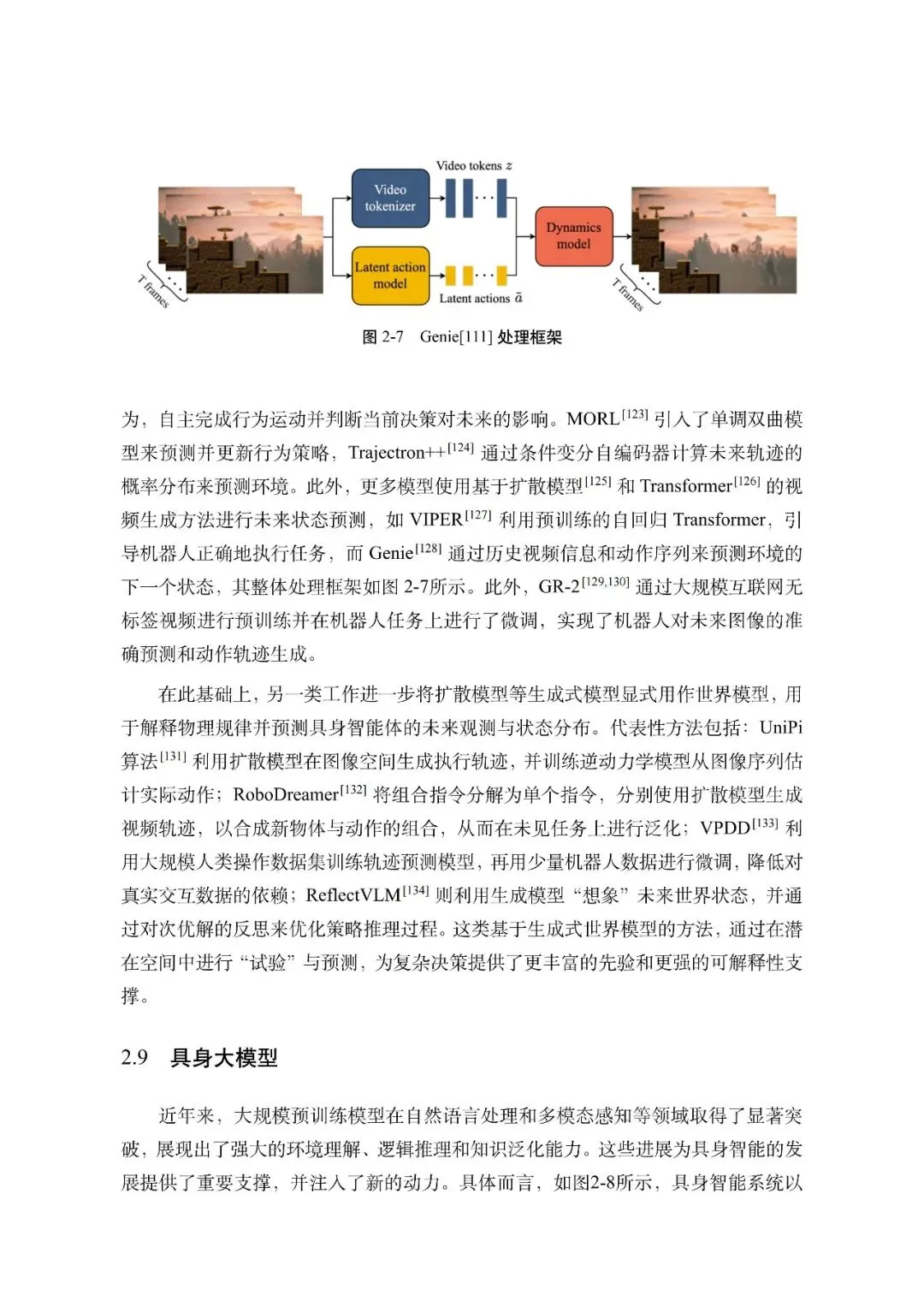
:是机器人学中的变革性范式,帮助机器人感知、预测和执行任务。通过视觉模型、图神经网络等感知和理解环境,通过MORL、Trajectron++、扩散模型等预测下一步行动和未来状态,还将生成式模型用作世界模型解释物理规律和预测状态分布,如UniPi算法、RoboDreamer等。 - 具身大模型
:以“感知-规划-行动”闭环范式组织核心架构,在跨模态感知与表征学习(显式和隐式方法)、智能决策规划(如SayCan、InnerMonologue等方法)、动态运动控制(如ALOHA-ACT、RT系列、OpenVLA等)方面赋能具身系统,还能生成训练数据缓解数据稀缺性,如GenSim框架。 - 具身智能安全
:需从规划、导航、操作和交互等方面确保稳健性与可靠性。规划中面临目的劫持(隐藏语音指令、超声波等攻击)、越狱和后门攻击、幻觉问题;导航安全涉及GPS攻击、传感器攻击、安全路径规划;操作安全关注安全环境感知和安全动作执行;交互安全涵盖多智能体协作安全和人机交互安全。
具身智能数据集与平台
- 具身智能数据集
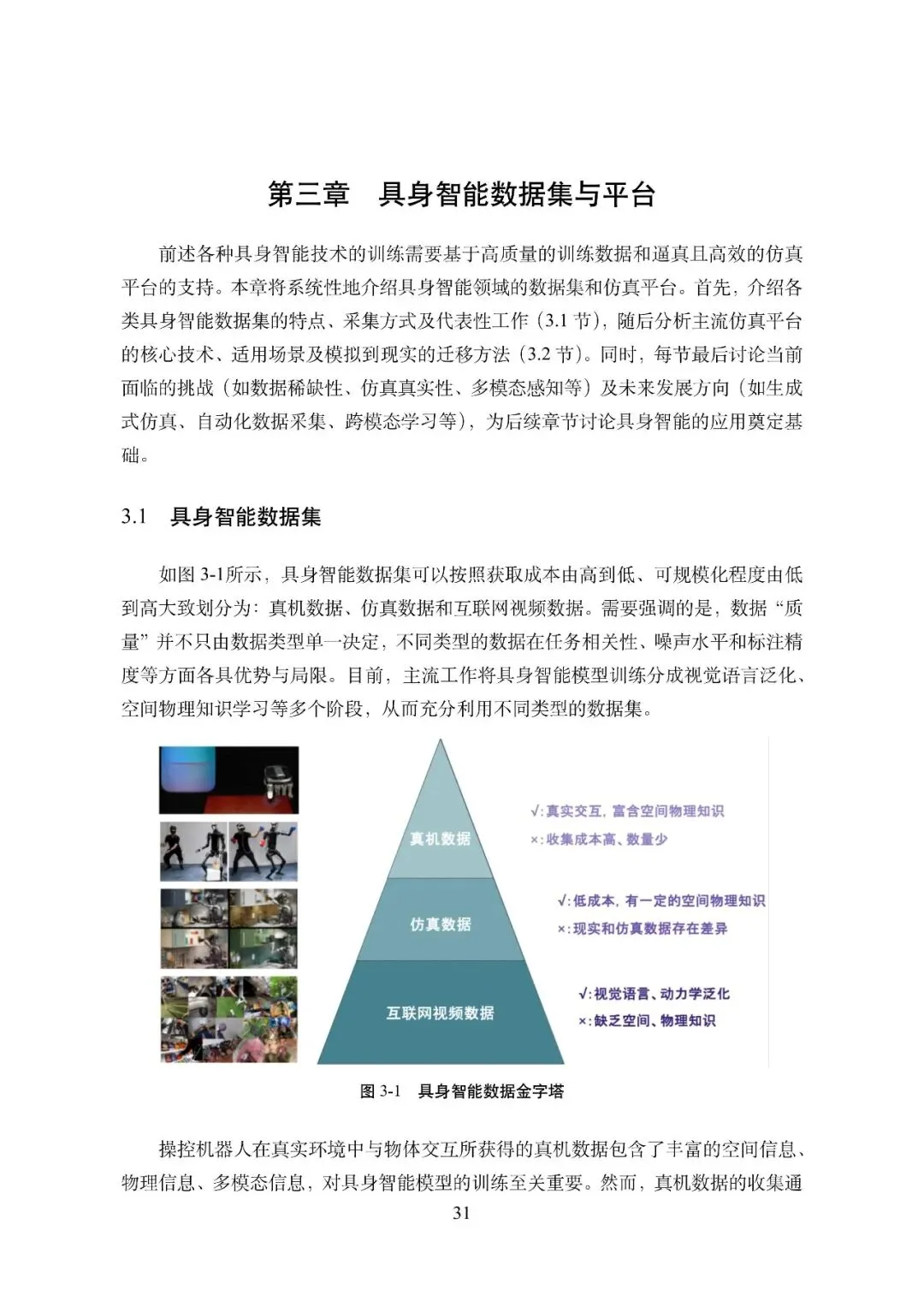
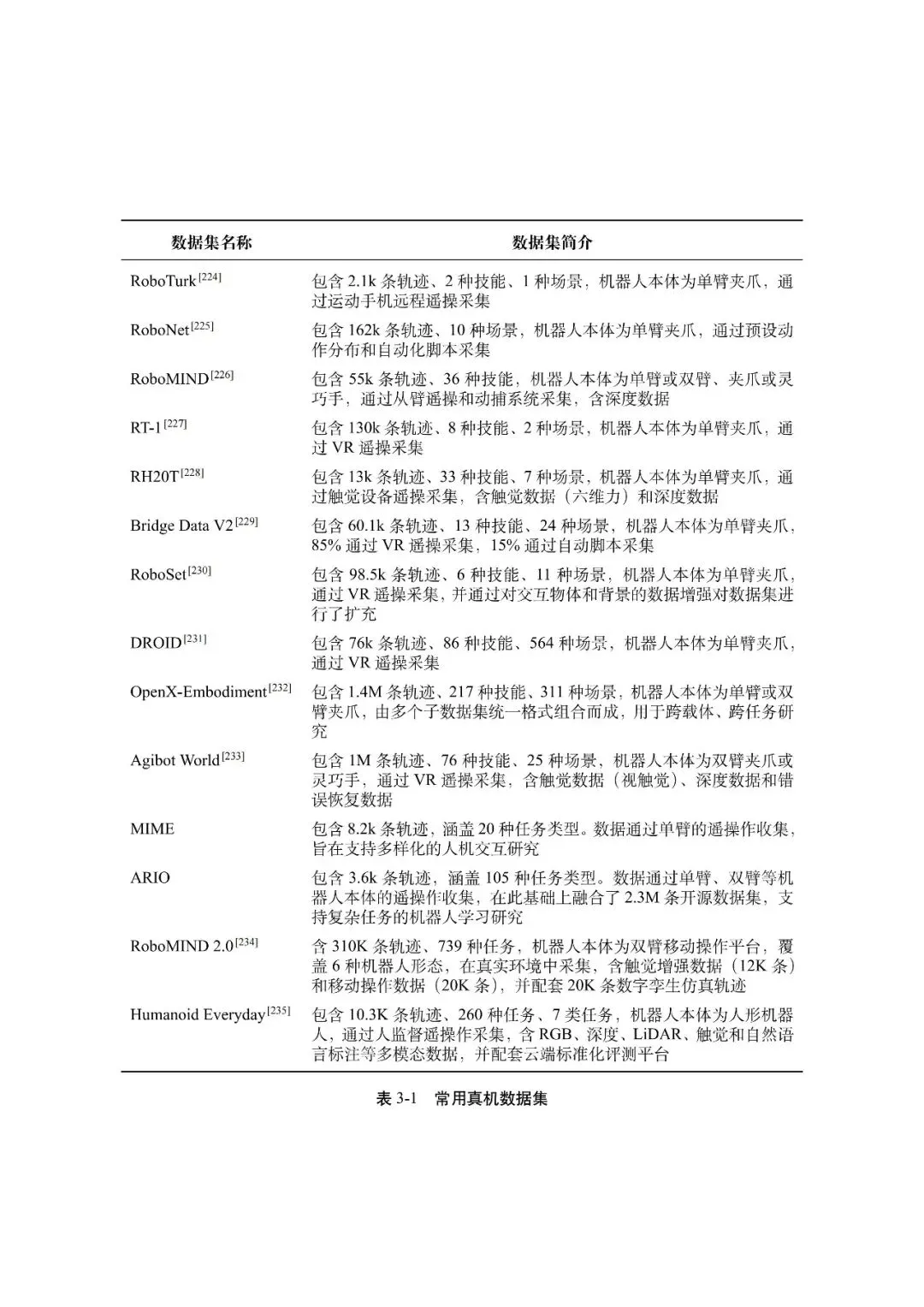
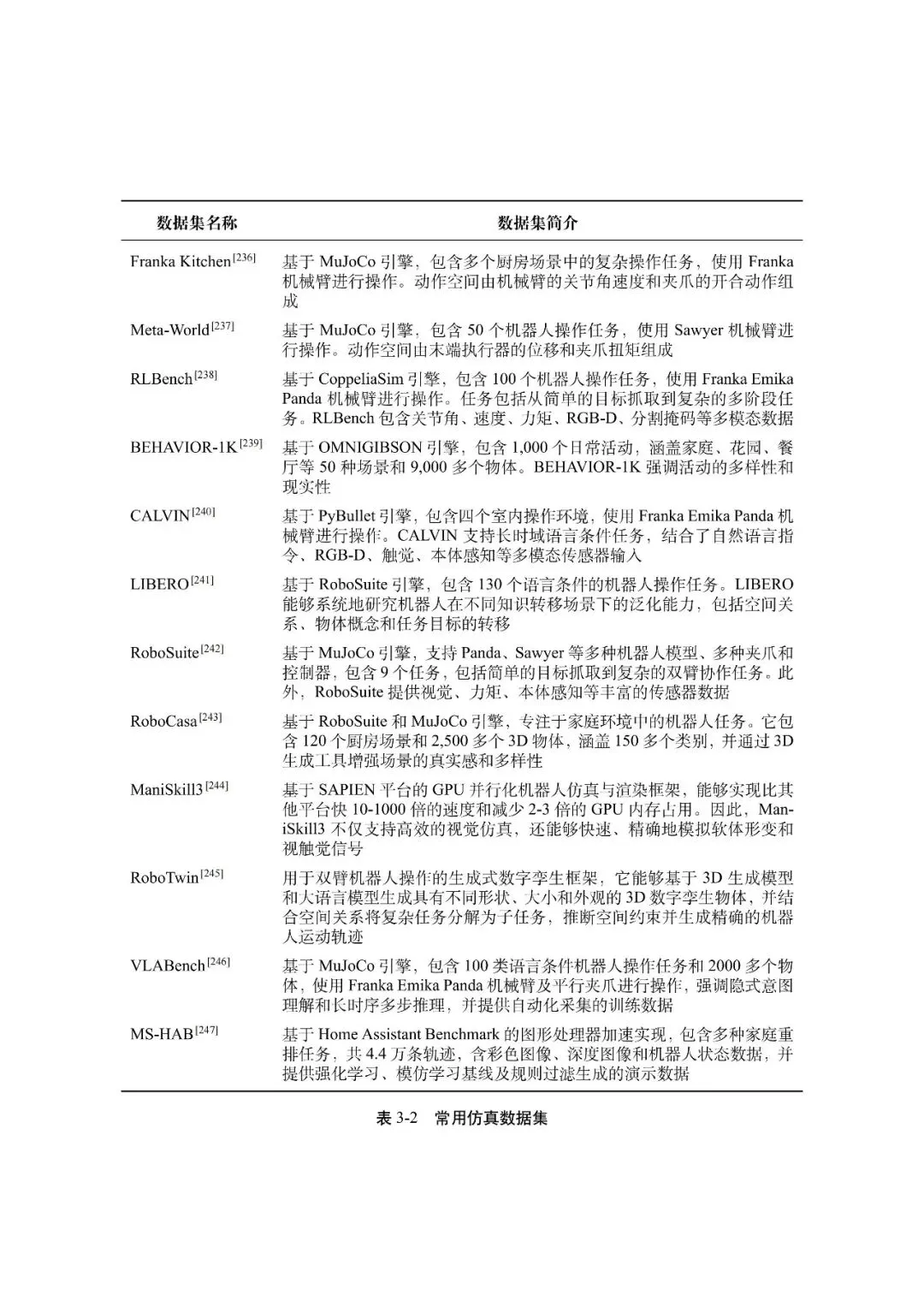
:按获取成本和可规模化程度分为真机数据、仿真数据和互联网视频数据。真机数据包含丰富信息但获取成本高,采集方式有拖曳示教、自动收集、遥操作、手持夹爪等,有RoboTurk、RoboNet等代表性数据集;仿真数据成本低但存在“虚拟-现实鸿沟”,通过构建数字孪生模型生成,有Franka Kitchen、Meta-World等数据集;互联网视频数据数量庞大但缺乏操作交互信息,通过利用VLM、视觉表征预训练、动力学预训练等方式利用。 - 具身智能模拟器
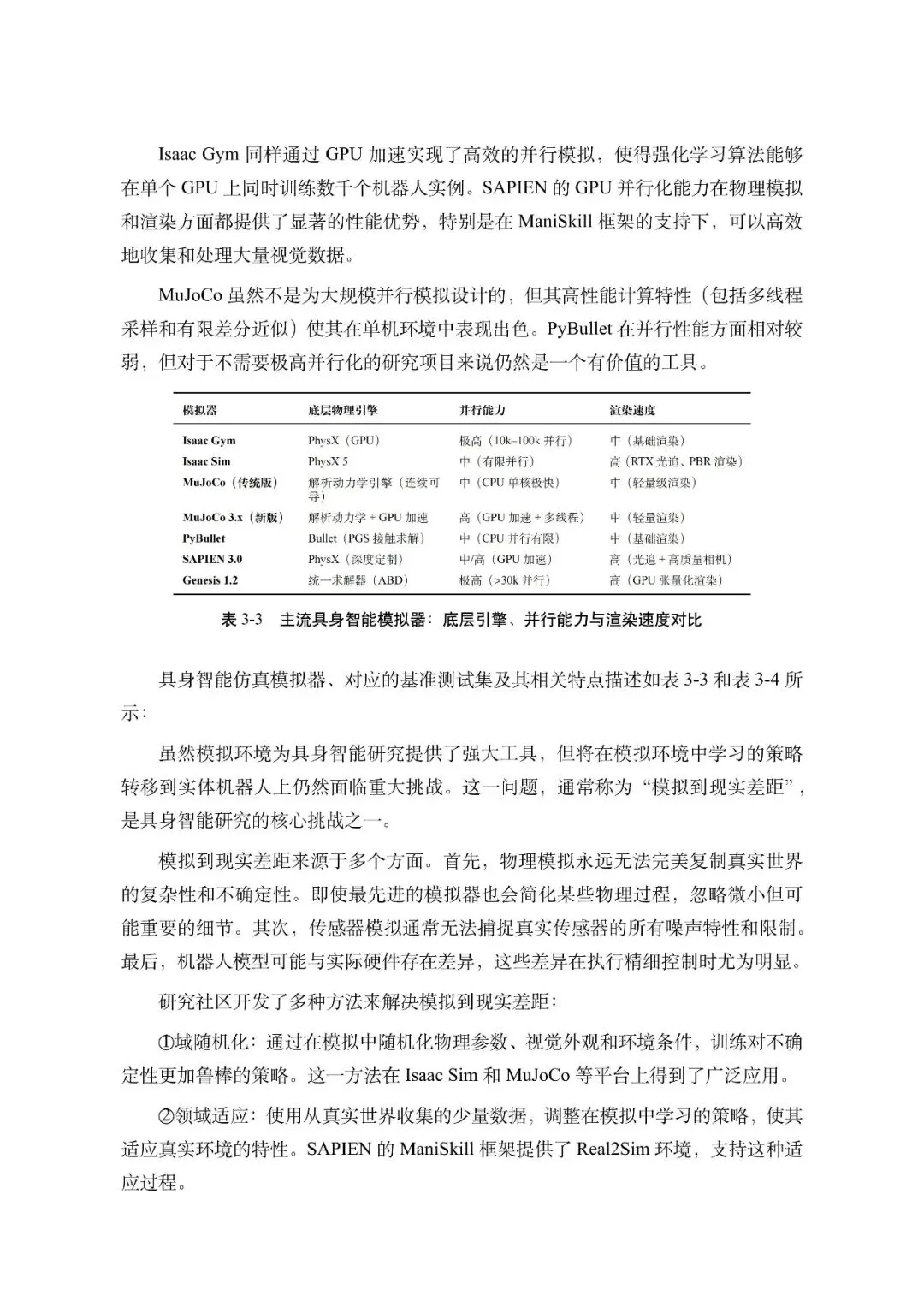
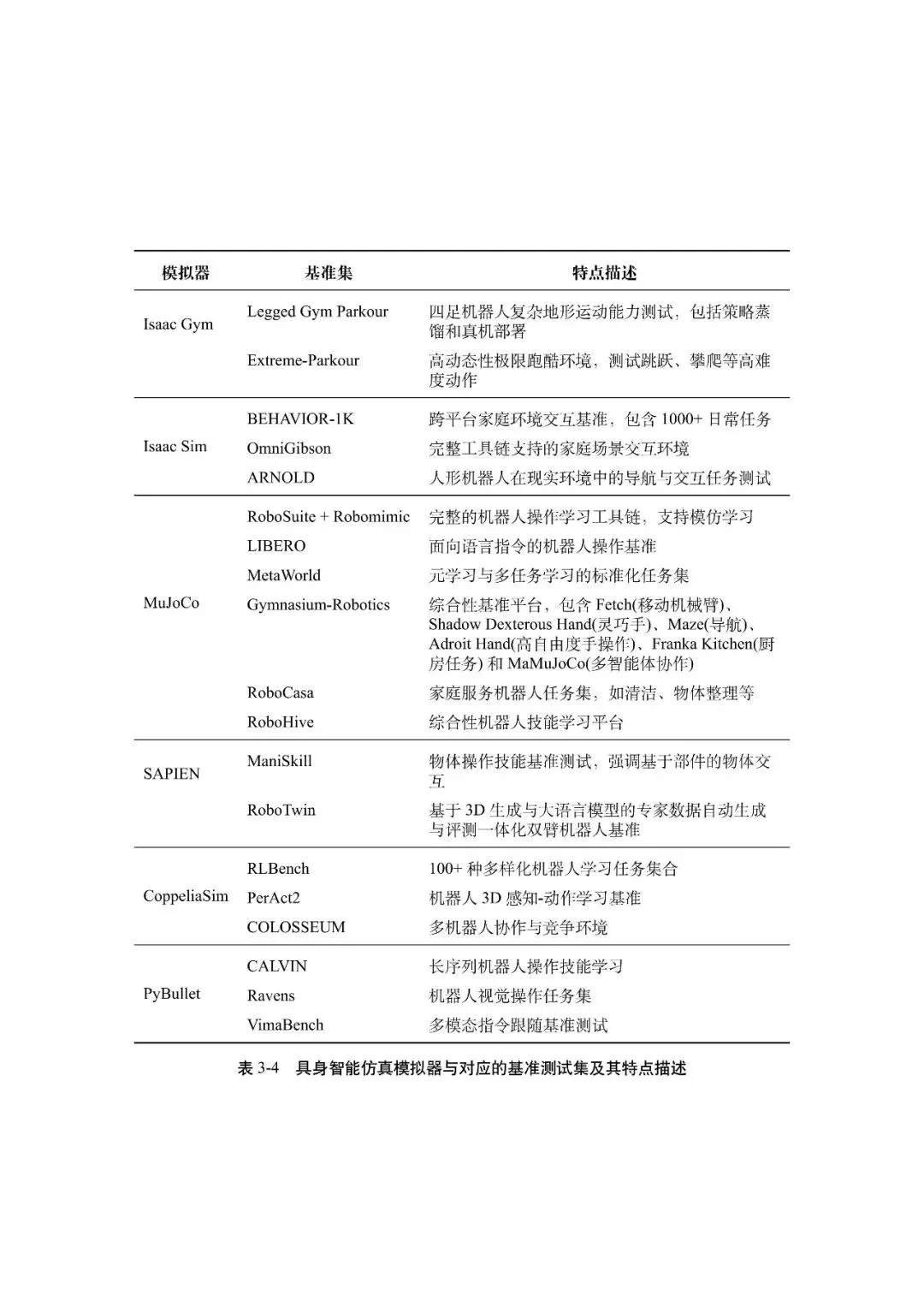
:为具身智能研究提供虚拟物理世界,解决真实环境数据收集耗时昂贵、有安全风险、迭代周期长等问题。主要平台有NVIDIA Isaac生态系统(Isaac Sim和Isaac Gym)、MuJoCo、PyBullet、SAPIEN、Genesis等,各平台在物理模拟精度、效率、感知模拟、并行模拟等方面有不同特点。模拟到现实差距源于物理模拟不完美等,通过域随机化、领域适应等方法解决,未来将向多模态传感器模拟、准确物理模拟、提高并行化能力、集成生成式AI等方向发展。
具身智能行业应用
- 生活服务业
:在家庭服务中实现家务全流程自动化,如衣物洗护、地面清洁等,有1X Technologies NEO、Figure AI Figure 02等产品;在餐饮与零售场景赋能全链条服务,如后厨备餐、前厅服务等,有Figure AI Helix VLA模型等应用;在家庭教育与陪伴中融合知识传授与情感关怀,如优必选Welli优颐然机器人等。 - 工业
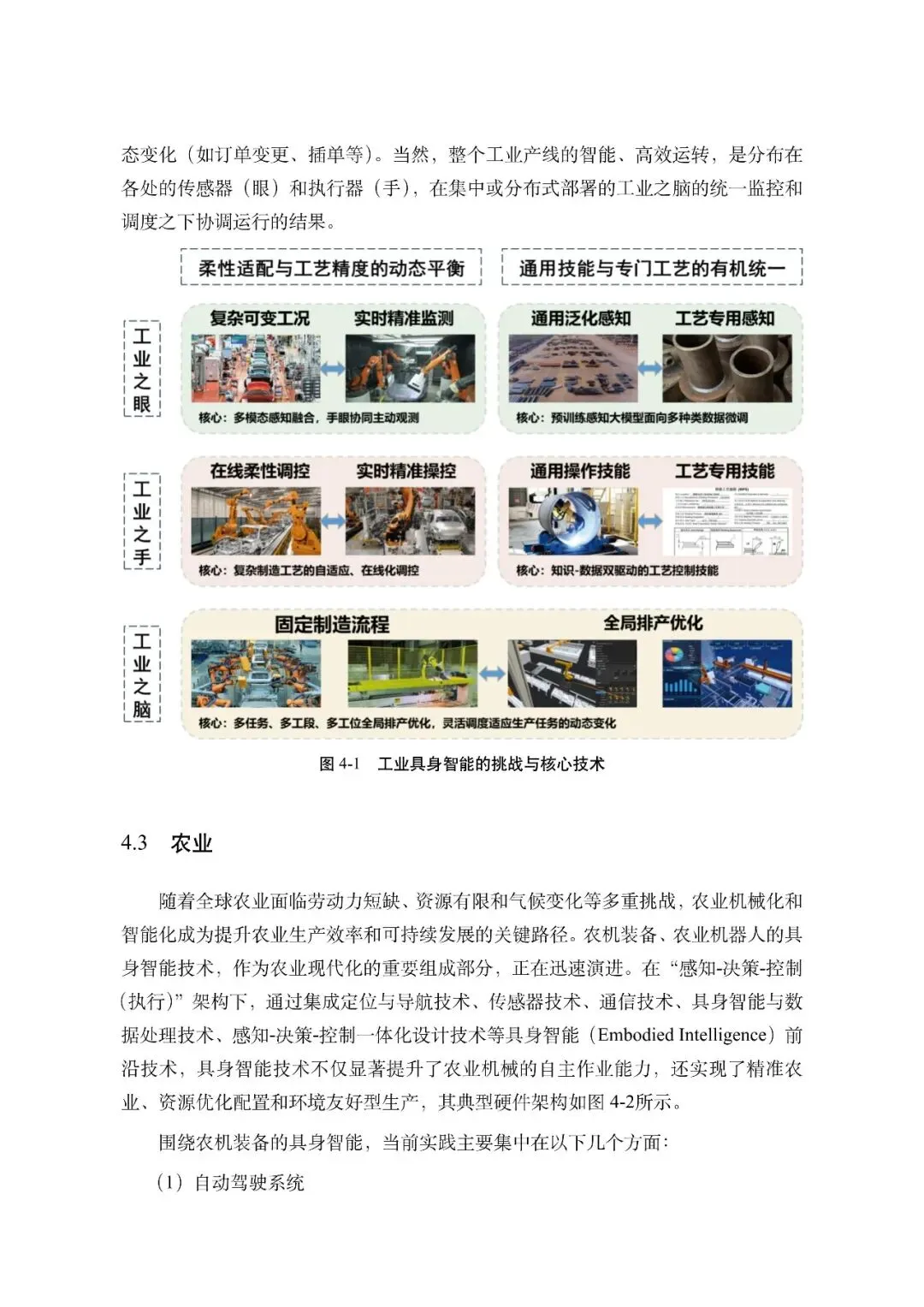
:工业具身智能是使机器人在限定工业场景完成生产作业的技术与系统,面临柔性适配与工艺精度动态平衡、通用技能与专门工艺有机统一的挑战,核心技术包括工业之眼、工业之手和工业之脑,推动制造业智能化升级。 - 农业
:农机装备、农业机器人的具身智能技术是农业现代化重要组成部分,实践集中在自动驾驶系统、农业机器人集群、精准农业应用、智能避障与安全系统、农机健康管理与预测性维护、农机能源管理与绿色农业等方面,关键技术包括定位与导航、感知、通信与网络、具身智能与数据处理、感知-决策-控制一体化设计等,正从“自动化执行”向“认知型自主”转变。 - 交通
:具身智能为交通治理提供新路径,在基础设施安全领域提升监测可靠性和效率,如华为智能监测系统、港珠澳大桥健康监测系统;推动自动驾驶从模块化向端到端架构转变,如特斯拉FSD V12、小鹏XNGP系统;降低物流运输成本,如亚马逊测试Digit机器人;提升交通枢纽运维效率,如杭州亚运村路侧单元。 - 能源与电力
:在输电线路巡检与通道运维、新能源场站运维与设备清洁、变电站与配电设施智能巡检与操作、储能等新业态具身协同等环节展开部署,形成“空地协同、多机协作”的智能运维体系,未来将走向跨场站、跨电压等级的协同调度与自主运维。
具身智能未来发展趋势
- 关键技术发展趋势
:在多模态感知与认知融合、自主决策与闭环控制、自适应学习与知识进化、仿生形态设计与运动控制、群体协同与分布式智能、安全可信与伦理治理等关键技术方面将取得重要进展,如仿生传感器集成、神经符号推理、强化学习与大模型融合、柔性材料应用、群体协同架构、安全机制贯穿全生命周期等。 - 技术应用发展展望
:算法架构从VLA向WAM范式跃迁,如Google DeepMind Genie 3、NVIDIA Cosmos-Predict2.5等;数据范式发生结构性变革,包括自我中心感知、通用操作接口、人类视频迁移学习、数据飞轮与Sim-to-Real闭环协同演化;动作表示方法从离散到连续、从独立到耦合演进,强化学习与VLA深度整合,长程任务实现突破,技术向实用化落地跨越。 - 研究平台发展展望
:数据采集平台向便携化、低成本、跨本体转型,如Stanford UMI数采系统、鹿明机器人FastUMI Pro;仿真平台开放化与标准化,如NVIDIA Isaac Lab与Cosmos整合、Genesis物理引擎、国内开源平台,实机验证平台规模化建设;数据生态全球化与开源化,Open X-Embodiment数据集扩展,开源社区提供全流程框架,数据标准国际化协调紧迫。 - 标准化发展展望
:标准化是引领具身智能技术创新、规范产业发展、保障安全应用的核心支撑,目前全球处于起步探索阶段。未来将聚焦基础定义、智能化、接口适配、安全治理方向研制标准,形成协同配套格局,深化国际合作,提交中国方案,提升全球标准话语权。
总体结论
具身智能作为人工智能前沿研究方向,本质是智能体通过与环境动态交互实现自主学习与能力演进,融合多学科知识,构建“感知—认知—行动”动态闭环,推动人工智能从“离身计算”向“具身智能”范式跃迁。已形成多模态感知、基于大语言模型的认知推理、强化学习等相对完备的技术体系,高质量数据集和仿真平台为其提供支撑。目前正逐步渗透到工业制造、家用服务、医疗手术、农业等行业,带来生产效率提升等社会经济效益。未来将聚焦技术创新、应用拓展和产业生态,提升人机交互自然性和环境适应能力,向更开放复杂场景延伸,建立标准规范体系,同时关注技术伦理和安全保障。虽面临数据采集、算法泛化和系统可靠性等瓶颈,但随着技术完善和应用丰富,未来十年将成为重塑人类生产生活方式的重要技术力量,为经济社会发展提供新增长动能。
敬请关注、点赞、转发、分享!
扫描下方二维码进入行业微信群(如过期,请看最新文章)!
商务合作&转载,请后台留言!

(本文内容来自网络。本号所刊发文章仅为学习交流之用,无商业用途,向原作者致敬。因某些文章转载多次无法找到原作者在此致歉,若有侵权请告知,我们将及时删除,本文仅供学习交流、我们注重分享,勿作商用,版权归原作者。亦或存在AI图文部分。根据国家版权局相关规定,纸媒、网站、微博、微信公众号转载、摘编本微信作品,请注明本微信名称、二维码等关键信息,并在文首注明“特超高压创新”原创。个人请按本微信原文转发、分享。)