



PART 01
PART 02
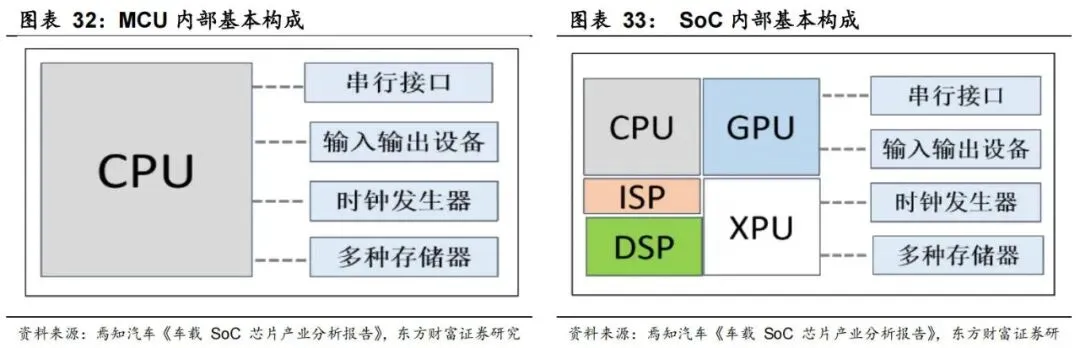
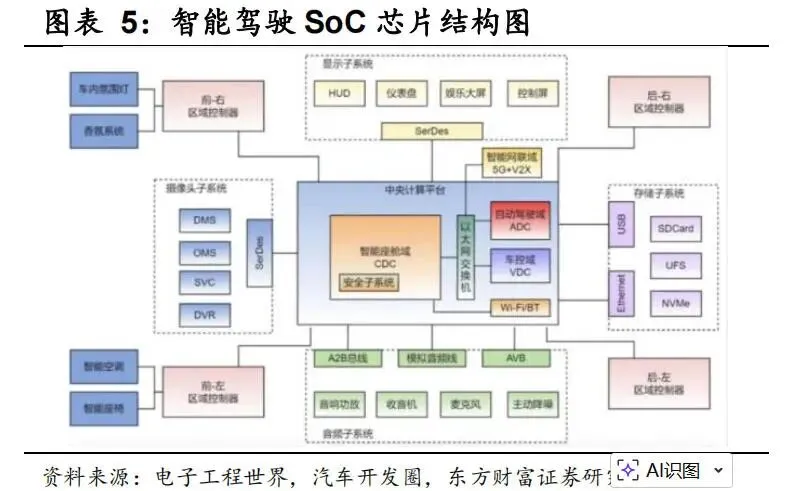
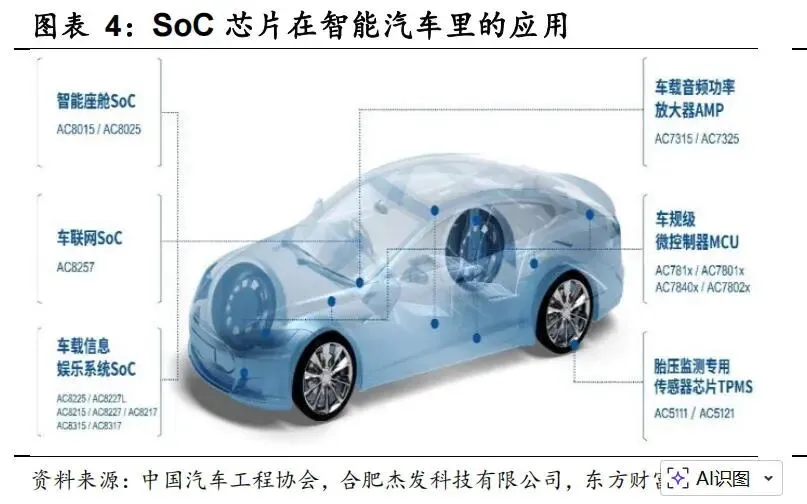
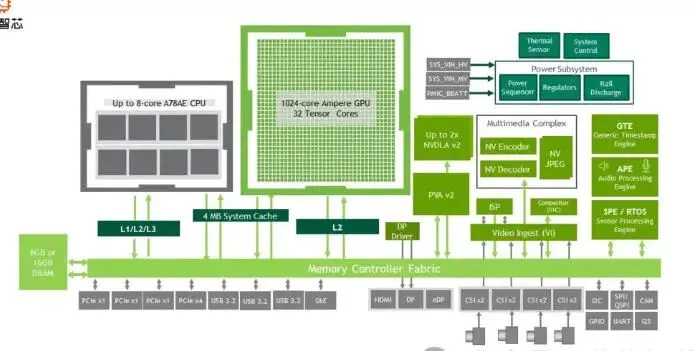
智能座舱SoC。其核心任务是驱动中控屏、仪表屏、副驾屏、HUD、后排娱乐屏等显示系统,同时支持语音交互、图形渲染、视频播放、多媒体处理、车机系统运行和部分AI应用。座舱SoC重点关注CPU性能、GPU渲染能力、视频编解码能力、多屏输出能力、操作系统兼容性、生态适配和功耗表现。 
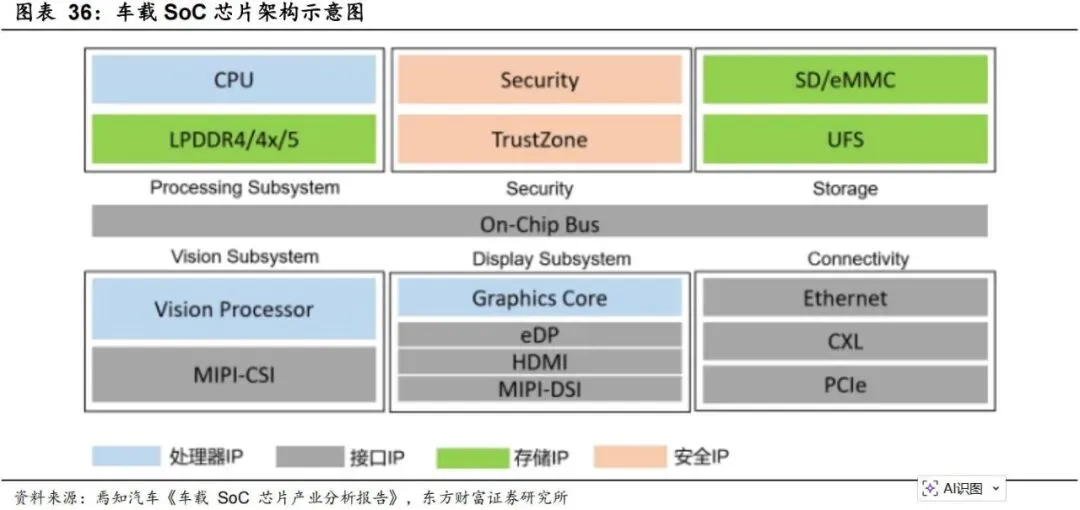
智能驾驶SoC。其核心任务是承担ADAS和自动驾驶系统的感知、融合、预测、规划、决策等计算任务。智能驾驶SoC通常集成高算力NPU、CPU、ISP、DSP、视频输入接口、高速通信接口和功能安全模块,强调AI算力、实时性、传感器接入能力、低延迟处理和安全冗余。 舱驾融合SoC。随着座舱域和智驾域边界逐步模糊,部分芯片开始尝试在单颗SoC或同一计算平台内同时承载座舱和驾驶辅助任务。舱驾融合要求芯片具备更强的异构算力、更完善的虚拟化隔离、更高等级的功能安全和更复杂的软件调度能力。 网关、通信与车身控制相关SoC。这类芯片承担车内网络通信、数据转发、区域控制、以太网交换、CAN/LIN接口管理、车云连接等任务,是软件定义汽车架构中的重要基础设施。 雷达、视觉、DMS、OMS、行车记录仪、环视等专用或半专用SoC。这些芯片往往围绕图像信号处理、传感器数据处理、轻量级AI推理和低功耗运行展开,在整车智能化中承担边缘感知节点角色。
PART 03
PART 04
PART 05
PART 06

PART 07
PART 08
供应链安全需求增强。汽车产业链全球化程度高,关键芯片受地缘政治、出口管制、产能周期和海外供应商策略影响较大。主机厂希望在核心芯片上形成多供应商体系,降低断供风险。 智能化成本压力上升。高阶智能驾驶和智能座舱需要大量算力硬件,如果完全依赖海外高端芯片,整车成本压力较大。国产SoC若能在主流功能上达到可用甚至好用水平,将具备明显性价比优势。 本土车企迭代速度快。中国新能源汽车市场竞争激烈,车型更新周期短,智能化功能迭代快。海外大厂标准化产品和服务响应未必能完全匹配本土需求,国产厂商通过深度定制和快速响应获得机会。 算法和芯片协同需求提升。智能驾驶不是单纯硬件问题,而是算法、数据、软件和芯片协同优化。国产厂商如果具备算法和工具链能力,可以在特定场景下实现更好的系统效率。
第一阶段是外围和中低端场景替代。国产SoC先在行车记录仪、DMS、OMS、车载视觉、低阶ADAS、基础座舱和部分车载终端中实现导入。这类场景对安全等级和算力要求相对可控,更容易形成量产经验。 第二阶段是主流智能座舱和中阶智驾替代。国产厂商进入中控座舱、前视一体机、高速NOA、行泊一体等主流智能化场景,与合资或自主品牌车型形成平台化定点。 第三阶段是高阶智驾和中央计算平台突破。国产SoC需要在城市NOA、L3/L4、舱驾融合和中央计算平台中与海外巨头竞争。这一阶段不仅需要芯片性能,还需要功能安全、软件生态、算法闭环、工具链成熟度和客户信任。
第一是芯片架构能力。包括NPU设计、CPU/GPU集成、ISP能力、内存带宽、接口配置、功耗控制和功能安全设计。 第二是算法与软件能力。特别是在智能驾驶领域,芯片要与感知算法、规划控制算法、模型部署工具和编译器深度协同。 第三是车规量产能力。包括可靠性验证、功能安全流程、信息安全、质量体系、长期供货和客户工程支持。 第四是生态合作能力。芯片厂商需要与Tier1、传感器厂商、软件中间件厂商、操作系统厂商和主机厂共同构建生态。 第五是商业化能力。车规项目周期长、资金投入大,企业需要具备持续研发投入、客户拓展和规模交付能力。
PART 09
PART 10
PART 10
PART 11
SoC :System on Chip,系统级芯片,将多个计算、控制、通信和安全模块集成在同一芯片或封装中。
ADAS :高级驾驶辅助系统,包括AEB、ACC、LKA、BSD等功能。
NOA :Navigate on Autopilot,导航辅助驾驶,通常分为高速NOA和城市NOA。
NPU :神经网络处理单元,用于AI模型推理加速。
ISP :图像信号处理器,用于摄像头图像预处理。
DSP :数字信号处理器,适合音频、雷达、传统视觉等信号处理任务。
TOPS :每秒万亿次运算,常用于衡量AI算力。
ASIL :汽车安全完整性等级,ISO 26262中的功能安全等级。
E/E架构 :汽车电子电气架构,决定整车控制器、通信网络和计算平台组织方式。
舱驾融合 :将智能座舱与智能驾驶部分计算任务在统一芯片或计算平台中融合。
中央计算平台 :整车电子架构高度集中化后的核心计算单元,承载跨域功能和软件服务。