



报告延伸:人形机器人系列深度报告(四):具身大模型(文末附全文PDF) 出 品 方:兴业证券
1. 瓶颈在大脑:硬件成熟,软件智能成为大规模应用关键
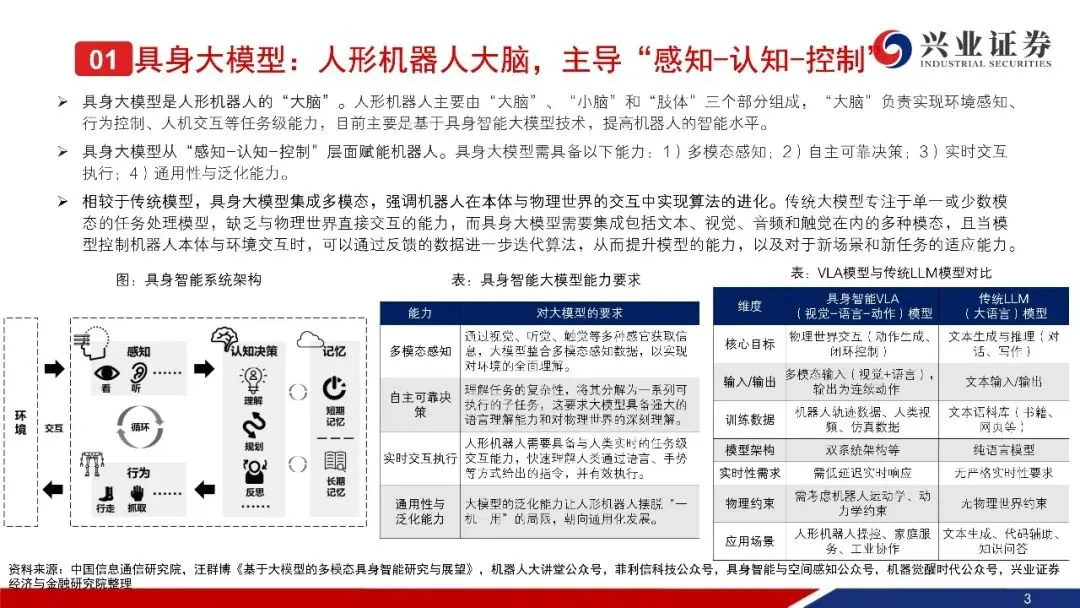
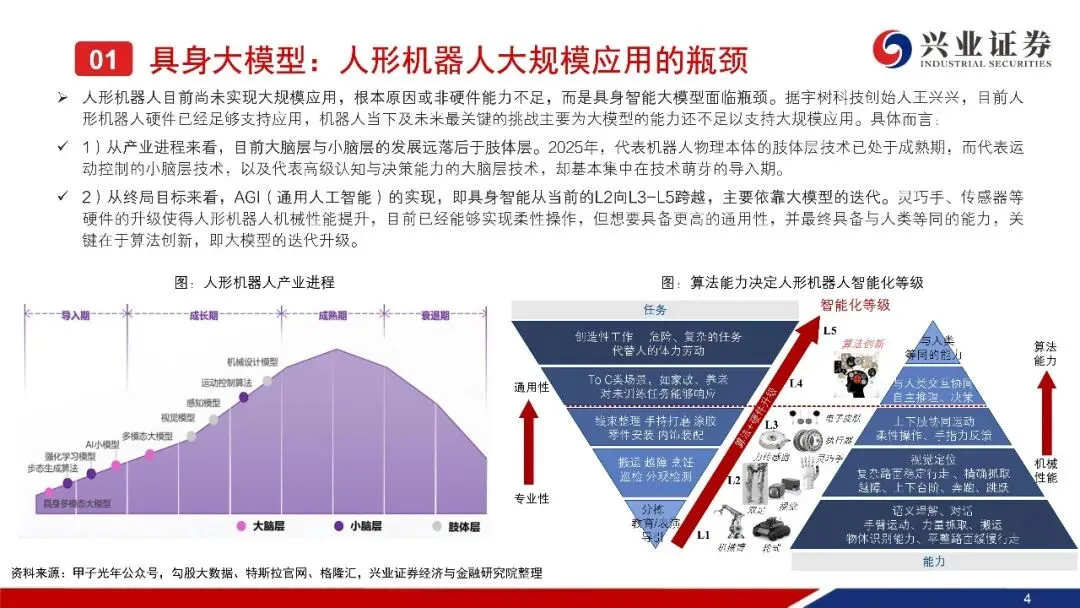
报告核心观点表明,人形机器人长久以来都没能大规模投入应用,其根基性的阻碍并非硬件能力欠缺,而是作为“大脑”的具身大模型,在发展进程上远远滞后,当前肢体层面的技术已然相对成熟,然而体现高级认知以及决策能力的大模型依旧处在技术萌芽阶段,算法的创新以及迭代,是决定机器人从执行特定任务朝着通用智能实现跨越的关键因素。
2. 路径未收敛:分层式与端到端架构各有优劣
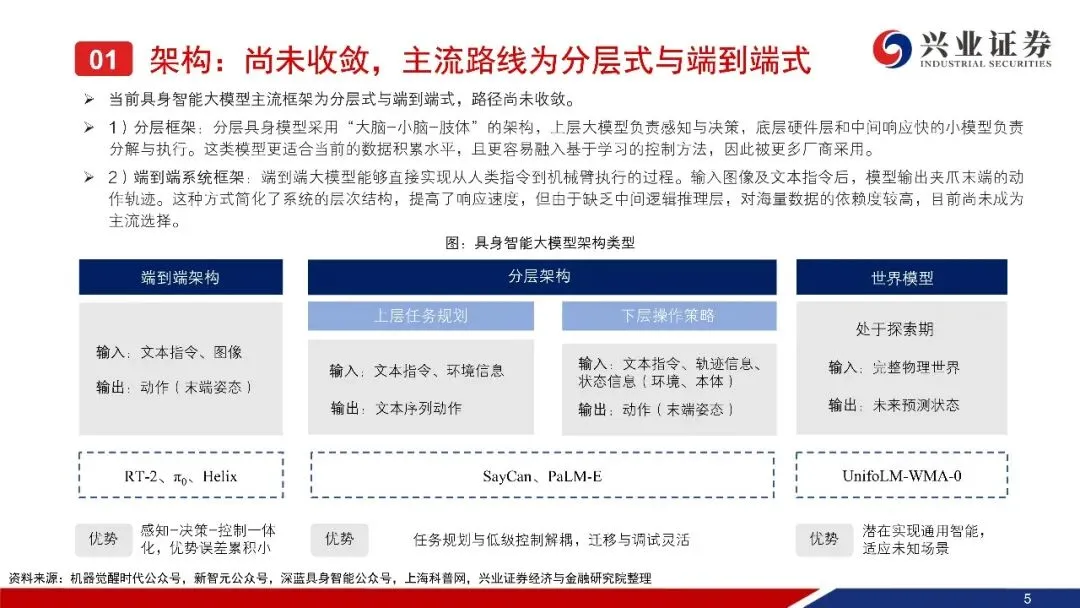
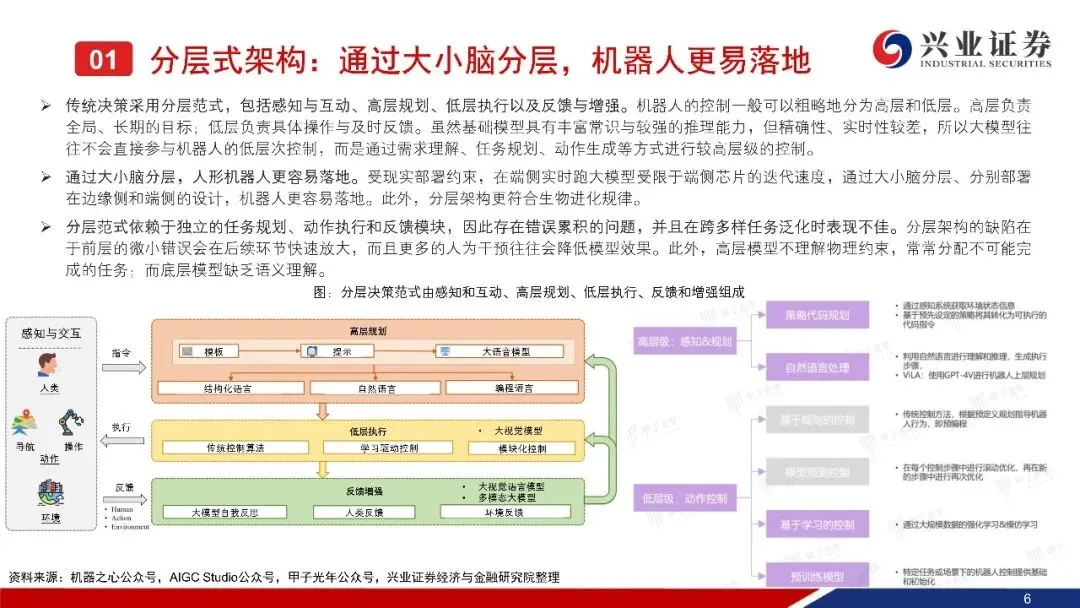
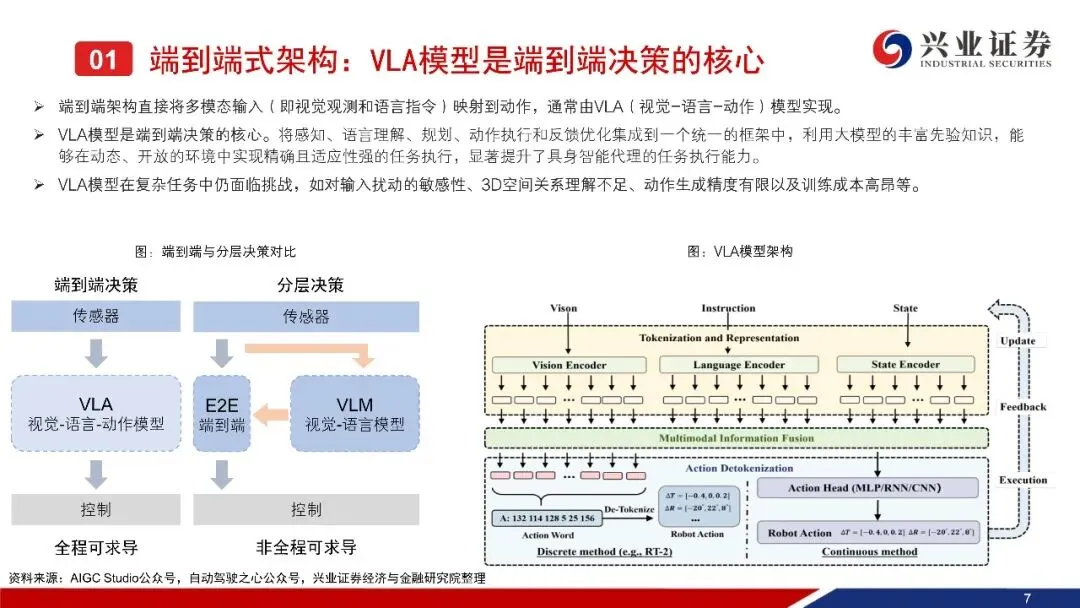
当前,具身大模型的主流技术路径,还没有达成统一。分层式架构,也就是大脑-小脑-肢体这种架构,它更加契合当下的数据积累水准,这种架构容易落地,然而却存在着错误累积,以及泛化能力差的状况。至于端到端架构,像VLA视觉-语言-动作模型,它把感知、规划、执行整合为一体工作,响应速度快,并且理论上限也高,但它对海量高质量数据的依赖程度极大。当下,谷歌、特斯拉、Figure AI等国内外的巨头,正顺着这两条路线同时进行探索。
3. 海外标杆:双系统架构与合成数据成为主流实践
海外的典型模型,像Figure AI的Helix以及英伟达的GR00T N1,都不约而同地运用了“系统1(快思考/执行)+系统2(慢思考/规划)”这样的双系统分层架构,以此来平衡实时性与泛化能力。而Physical Intelligence的π0模型,证明了借助海量多源数据(包含仿真数据)进行预训练,再加上小规模真机数据微调的这种模式是有效的。特斯拉运用其具备的FSD技术栈,达成了从自动驾驶朝着人形机器人方向的统一端到端架构的迁移。
4. 数据飞轮:高质量真机数据是核心壁垒与价值高地
大模型迭代赖以为驱动的“燃料”是数据,报告着重指出,具身智能对于数据的需求已然升级成海量、多模态以及高精度的状况,这里面,真机数据价值最为高但获取难度为最大,形成了处于金字塔顶端的核心壁垒,当下的数据采集方式涵盖VR遥操作、动捕服、数据手套等,并且行业趋势正朝着效率更高的视频学习转变,还构建起“部署-采集-优化-再部署”的机器人数据飞轮。
5. 产业展望:传感器与数据采集技术将迎来发展机遇
站在产业落地这个角度,具身大模型的进化是没法离开两个基础支撑的,其一呢是高性能传感器,它们好像机器人的“感官”一样,能给模型给予环境以及自身状态的关键数据。其二是高质量的数据采集方案,这在获取真实运动和操作数据方面是前提条件。在未来时间里,随着人形机器人向着更为复杂的场景去进行渗透,围绕六维力传感、柔性触觉、3D视觉以及高效动捕技术这些方面的需求将会持续不断地攀升,而相关技术链的成熟程度会直接对大模型的迭代速度以及商业化进程产生影响。



『公众号并非行业报告搜索引擎,下方链接一键解锁20W份报告』
免责申明:top行业报告收录的资料版权归原撰写/发布机构所有,若版权方认为有侵权问题,请立即通知删除。TOP行业报告——全行业报告平台,分享有价值的行业研究报告,行业数据报告,行业分析报告,行业调研报告,仅供行业科普学习。 点击查看→新用户必读【如何下载】