 “锐词捷语”,或点击下方公众号名片,免费订阅,选择“设为星标”,获取更多人工智能资讯。
“锐词捷语”,或点击下方公众号名片,免费订阅,选择“设为星标”,获取更多人工智能资讯。报告完整版下载方式见文末
具身智能,正在从 “实验室 demo” 走向万亿产业。但一直被一个问题卡死:硬件和软件深度绑定,换个机器人就得重写代码。
直到这份由 CCF 泛在操作系统开放社区发布的《2026 具身智能操作系统技术白皮书(EAIOS v0.1)》正式给出答案:给机器人做一套统一操作系统。
一、为什么必须要有 “具身智能操作系统”?
现在的机器人行业,还处在 “电脑没操作系统” 的原始时代 :
每个机器人硬件不一样,软件不能通用 一个动作要专门定制开发,成本高、周期长 模型训练完只能用在特定机器上,换身体就废 安全不可控,AI 幻觉可能直接导致物理危险
简单说:大脑和身体焊死了,没法分工,没法规模化。
白皮书直接点破:具身智能要成为万亿产业,必须先有 “操作系统” 这层共性底座。就像当年 Windows、Android 解放电脑和手机一样。
二、EAIOS 到底是什么?一句话讲懂
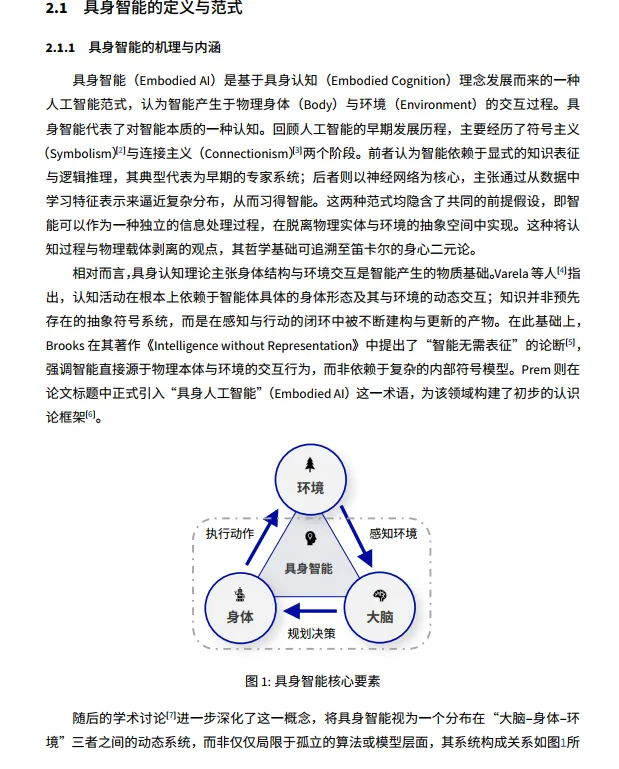
EAIOS = 具身智能的操作系统它的核心使命:把机器人的 “身体(硬件)” 和 “大脑(模型 / 软件)” 彻底解耦。
它用四层抽象统一机器人世界:
- 原语:硬件能力标准化(底盘、机械臂、夹爪)
- 服务:感知、地图、规划、决策、安全
- 技能:可复用动作单元(开门、抓取、导航、巡检)
- 任务:用户自然语言指令(帮我拿水、全屋巡检)
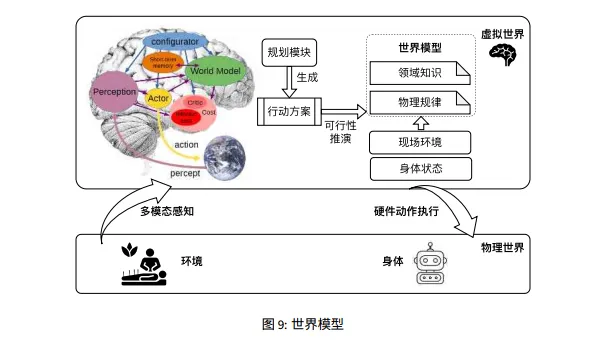
再加一个关键:世界模型 + 安全内核先仿真推演,再物理执行,确保安全。
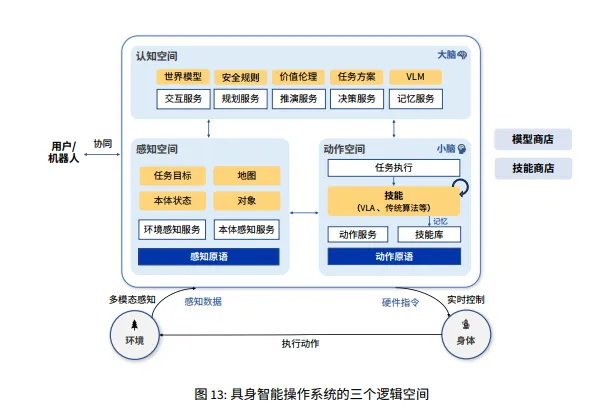
三、三大空间,构成机器人的 “大脑 + 小脑”
白皮书把机器人运行逻辑拆成三个空间:
1)感知空间:把物理世界数字化
建地图、识物体、定位、感知环境 把房间、窗户、桌子都变成 “对象” 让机器人知道 “我在哪、周围有什么”
2)认知空间:机器人的 “大脑”
世界模型:预测未来、模拟动作 任务规划:把一句话拆成一步步动作 方案推演:先仿真跑一遍,不直接乱动手 安全伦理:禁止伤害、禁止闯入、夜间静音等规则
3)动作空间:机器人的 “小脑”
技能库:导航、开关门、抓取、巡检 任务执行:稳定、实时、可中断、可回退 安全规则:速度、力矩、限位强制约束
四、最牛的创新:技能会自动积累,越用越聪明
EAIOS 最颠覆的一点:机器人会把成功的任务,自动变成 “技能” 存起来。
第一次做:慢系统 → 大模型规划 + 仿真推演 + 执行做熟以后:快系统 → 直接调用技能,秒级响应
就像人从 “新手学骑车” 变成 “本能骑车”。
未来机器人可以像装 APP 一样:去技能商店下载 “泡茶技能”“端茶技能”“护理技能”。
五、覆盖 6 大真实场景,全部可落地
白皮书直接给出行业应用蓝图:
- 酒店服务机器人:跨楼层、呼梯、配送、复用技能
- 巡检机器人:工厂 / 楼宇 / 机房,自动异常处理
- 物流机器人:仓内搬运、避障、多机协同
- 智能工业机器人:装配、焊接、柔性产线
- 移动操作机器人:开关抽屉、按按钮、跨楼层作业
- 护理机器人:养老、康复、助残,安全与伦理优先
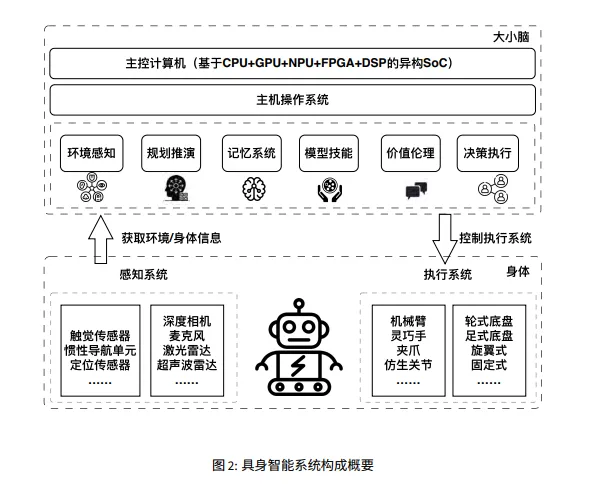
六、硬件也要跟着升级:三域硬件架构
为了适配 EAIOS,下一代硬件会分成三部分:
- 控制域:实时、安全、急停、稳控
- I/O 中枢:统一传感器、相机、雷达数据
- 计算域:跑大模型、规划、推理
彻底解决:延迟高、不安全、不同硬件不兼容。
七、路线图明确:2026 年原型,2027 年生态爆发
白皮书给出清晰时间表:
2026.4:基础框架与原型完成 2026.9:接入主流大模型、完善系统 2027.1:技能商店上线,开放开发平台 2027.6:社区生态成熟,推进行业标准
开源实现名叫 Robonix,即将开源上线。