


前言
/
刚刚!“人形机器人第一股”优必选发布2025年度财报,数据显示,其全尺寸具身智能人形机器人业务营收同比猛增约22倍,年化产能已超6000台。
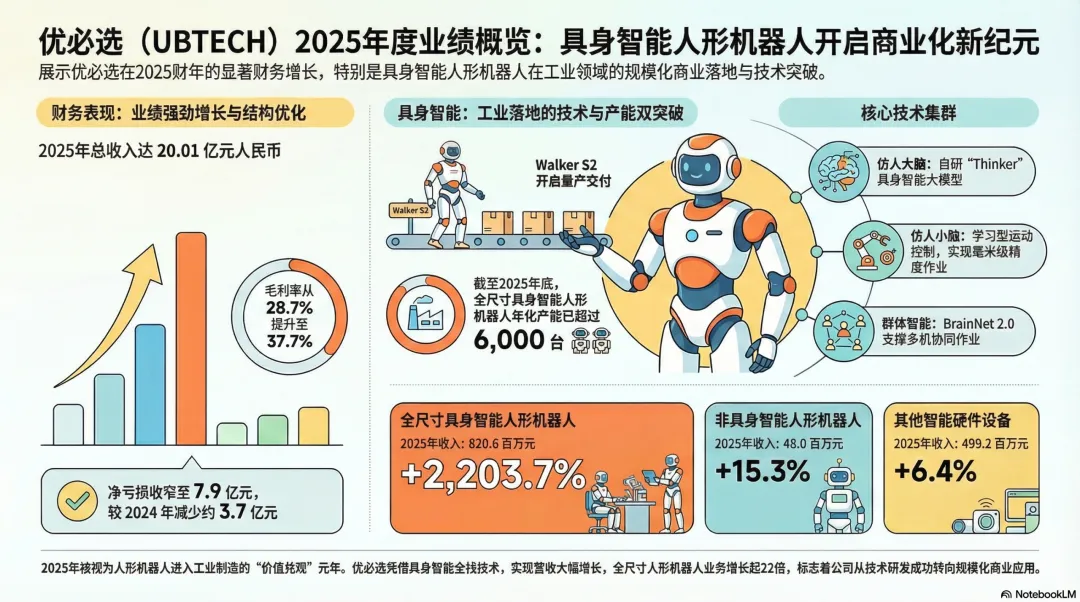
优必选2025年业绩概览
来源:优必选年报,AIRS产业研究整理
数据的爆发,预示着具身智能已进入工业一线,尤其是在当前工业制造产业规模最大、自动化程度最高的汽车制造与3C制造领域。
根据博研咨询数据,2025年我国3C制造行业市场规模接近万亿级别,总产能约6200亿件;中汽协数据显示,2025年我国汽车行业产量达到3453.1万辆。连续多年位居全球第一。
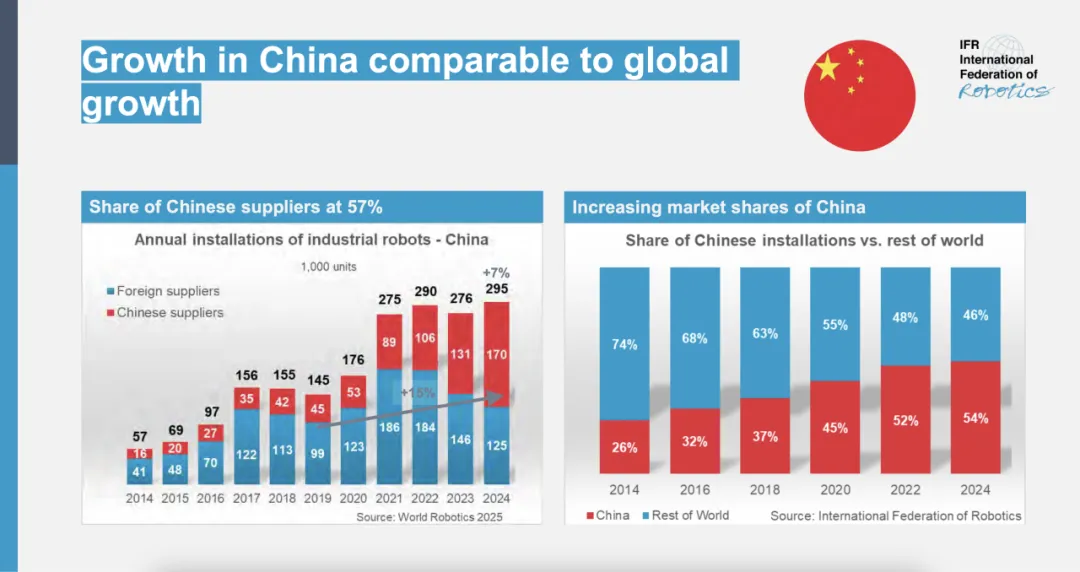
2024年中国工业机器人装机量占比来源:IFR 《WORLD ROBOTICS 2025》
规模庞大的背后,是高度自动化的生产体系。IFR数据显示,中国工业机器人保有量位居世界第一,汽车制造与3C长期是其中装机密度最高的两个行业,年装机量分别达到8.3万与5.7万台。

汽车制造总装工厂

3C制造精密装配工厂
来源:Bloomberg
但自动化并不等于无人化,尽管传统机械臂保有量巨大,在汽车总装或3C精密装配中,仍存在大量依赖人工的环节。财报展示,优必选正通过Walker S2等机型深入一线,解决料箱搬运、SPS 分拣、零件安装及质量检查等核心工位难题。具身智能通过“大模型(Thinker)+ 协同智能体(Co-Agent)”的AI双循环,正在补齐传统自动化难以触达的最后一块拼图。
Part.1 汽车制造
长流程耦合的复杂制造系统
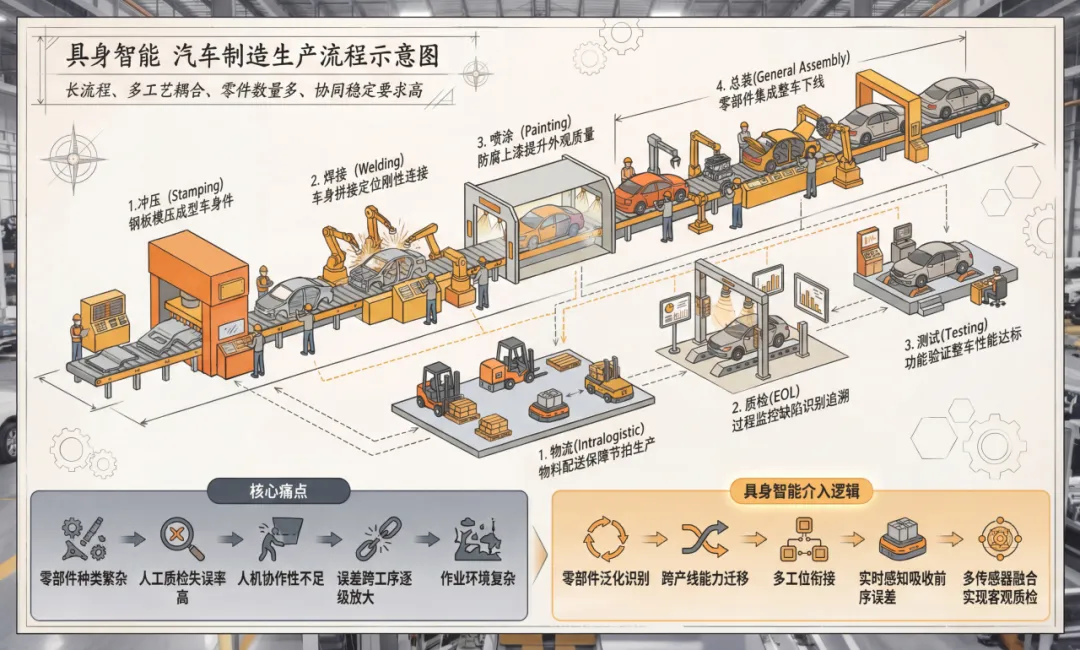
具身智能汽车制造生产流程示意图来源:AIRS产业研究
汽车制造是涵盖冲、焊、涂、总四大工艺及物流、质检的复杂耦合体系,需求在于实现海量零部件的高效集成与跨工序的高精度协同。虽然结构化工序已高度自动化,但在柔性物流、复杂装配及感官质检等“非结构化”场景中,自动化瓶颈依然突出,核心痛点与具身智能介入逻辑如下:
痛点
零部件种类繁杂传统自动化依赖专用工装与固定程序,因零部件种类繁杂,形态、材质与抓取方式差异显著,部署成本高、适配周期长。
人工质检失误率高漆面缺陷识别、间隙面差评估、开闭手感与异响检测等涉及视觉、触觉与听觉的综合判断,人工质检失误率高。
人机协作不足总装环节既涉电池包、座椅等重载搬运,又含多点对位与柔顺贴合等精细作业,传统工业人机协作不足。
误差跨工序逐级放大
焊装、涂装阶段产生的尺寸公差与热变形会逐步累积,传统开环作业误差跨工序逐级放大。
作业环境复杂
汽车总装车间人机混流现象普遍,路径干扰频繁,固定路线与围栏式自动化难以适应复杂作业环境。
零部件泛化识别通过三维视觉与多模态感知实现零部件泛化识别,结合生成式抓取策略提升对复杂物料体系的泛化处理能力。
全量覆盖检测
通过多传感融合与机器学习模型建立客观评价体系,实现全量覆盖检测与数据化反馈,质检准确性高。
深度人机协作
融合力觉感知与顺应控制,在保障安全的前提下完成重载操作与精细微调,实现深度人机协作。
实时感知吸收前序误差
通过工位级实时感知与力位融合控制,实时感知吸收误差,降低返修与干涉风险。
多传感器融合
通过视觉SLAM、多机协同调度与差异化避障等多传感器融合进行自主任务重构,适应环境。
具身
核心应用环节
智能焊接
焊接环节(Welding)主要负责车身结构件的刚性连接,在小批量试制及多车型混流场景下,较难实现复杂异形焊缝的轨迹自主生成、动态偏移补偿以及受限空间的高可达性作业。
越疆机器人激光跟踪技术
来源:越疆科技官网
在奔驰、大众、别克等汽车生产车间,越疆机器人CRA系列协作机器人采用激光寻位、接触寻位、电弧跟踪、激光跟踪技术,快速记录点位和生成焊接轨迹,针对工件位置偏移和热变形问题能够实现自动纠偏,并能够快速部署到狭小空间内,解决传统机械臂可达性不足的问题。
物流搬运
厂内物流(Intralogistic)贯穿冲、焊、总、检全流程,承担物料配送与工序间流转任务,难点在于增强对微型/异形零部件的泛化搬运能力,人机混流环境下的动态干扰适应,并打通末端自动驳接的断点。
通用具身机器人远征A2-W在工厂内进行搬运作业
来源:智元机器人供图
智元机器人与富临精工达成数千万元标的的项目合作,近百台远征A2-W落地富临精工工厂,智元远征A2-W轮式通用机器人,专为柔性智造场景打造,可广泛应用于周转箱拆码垛、搬运、上下料等多种场景。
柔性装配
汽车总装环节(General Assembly)具有“重载搬运与精细对位并存”的特征,需实现实现大尺寸/重型部件的柔顺贴合,降低对传统示教模式的依赖,并在开放环境下保障高安全性的人机协作能力。
小米机器人汽车车间装配来源:小米机器人官网
使用五指灵巧手工作的小米机器人在压铸车间自攻螺母上件工站中连续自主运行3小时,双侧同时安装成功率为90.2%,同时满足了最快76秒的产线生产节拍要求,还通过TacRefineNet模型,让机器人拥有了触觉感知的能力,这使得机器人能通过触觉进行精细操作。
智能喷涂
喷涂环节(Painting)负责车身防腐与外观质量提升,难点在于提升复杂曲面喷涂的轨迹适配度、实现漆面缺陷的自动识别与补喷,以此降低人工在有害环境下的作业风险。
大族机器人进行机器人喷涂来源:大族机器人官网
大族机器人与北京某行业客户进行深度合作,为汽车4S店喷漆车间提供免示教、全自动的机器人喷涂解决方案。机器人通过搭配3D视觉系统,对保险杠进行定位操作,并根据喷涂工艺,自主从工具区取换色漆枪、清漆枪或吹风筒。喷漆全程无需人工干预, 避免工人接触有害挥发物,且相对人工喷漆,机器人喷涂可节省色漆约10%、清漆约7%。
智能质检
整车质检(EOL)通过视觉、触觉与听觉感知确保车辆品质达标,难点在于建立可客观量化的感官评价标准,实现全量覆盖检测,并将质量数据结构化以形成闭环追溯。

优必选Walker S在蔚来工厂来源:优必选官网
优必选Walker S进入蔚来工厂开展质检实训,通过视觉与力控传感器对车门锁、安全带及前灯罩状态进行质量检测与数据化采集,将检测结果结构化输出并反馈至系统,为感官检测向标准化、可追溯检测提供实践验证。
电池测试
电池检测(Testing)涉及高压EOL、DCR等关键电性能验证工序,难点在于带电环境下实现接口的高精度安全插拔,并在高强度重复操作中确保检测的一致性与稳定性。

千寻人形机器人在宁德时代中州基地来源:宁德时代微信公众号
千寻智能人形机器人“小墨”在宁德时代中州基地正式投入运行,目前已能精准完成电池接插件插接等复杂作业,替代电池生产的EOL与DCR工序,其插接成功率可稳定在99%以上,作业节拍可达熟练工人级别,并能自主检测线束连接状态,发现异常即时上报,降低不良频率。
Part.2 3C制造
高节拍精密化的离散制造体系
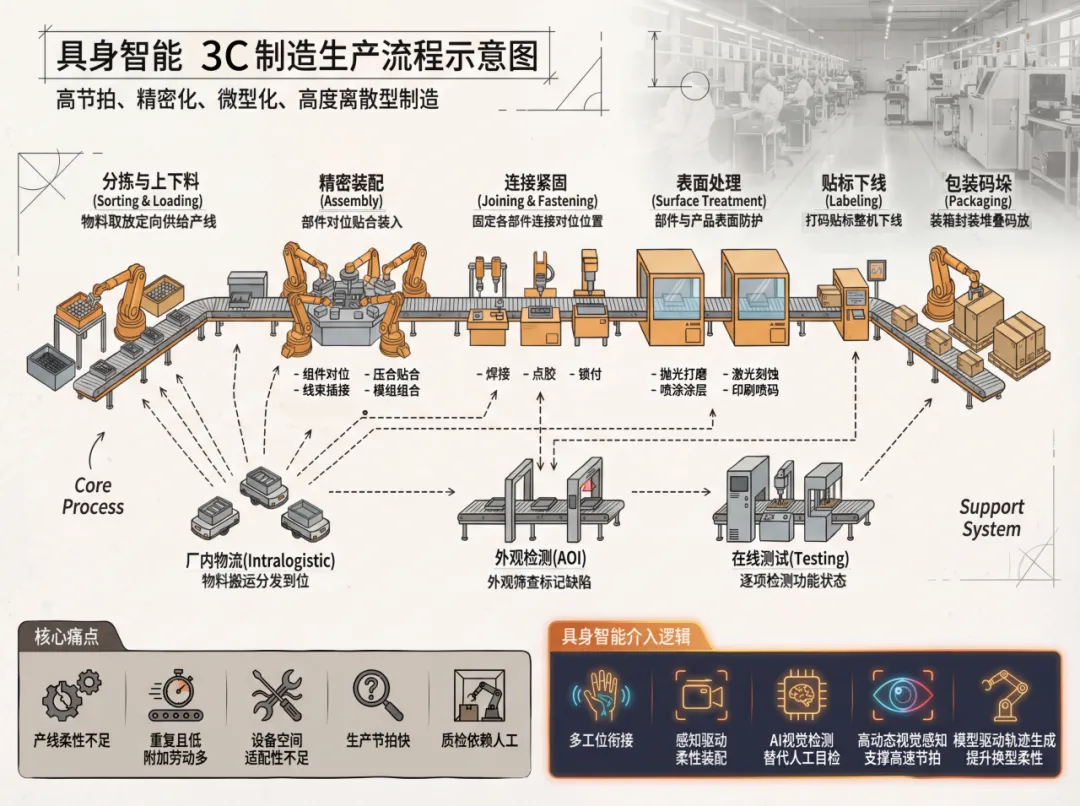
具身智能 3C制造生产流程示意图来源:AIRS产业研究
3C制造是高节拍、精密化的离散制造体系,涵盖从分拣装配到检测包装的全流程,核心需求是实现微小零部件的高精度作业与极速产出。目前,SMT及基础工序自动化程度较高,但在精密操作、异形件处理及高频柔性换型场景中,传统刚性自动化仍面临瓶颈,核心痛点与具身智能介入逻辑如下:
痛点
产线柔性不足3C产品更新周期短,换线频繁,产线柔性不足。传统自动化依赖专用治具与示教轨迹,每次换型需重新标定与调试。
重复且低附加劳动搬运分拣与上下料等工序重复性强、技术附加值低、劳动强度大且稳定性受人员状态影响。
设备空间适配性不足3C工厂普遍采用高密度产线布局与紧凑型设备集成方案,传统工业机器人体积较大,动作受限。
生产节拍快3C产线节拍通常以亚秒级计量,部分分拣与上下料进入毫秒级响应区间,单工位识别失败或抓取延迟会放大整线节拍损失。
质检依赖人工划痕、色差、装配缝隙与按键手感等缺陷尺寸微小、形态复杂,人工目检仍占较大比例,检测结果受主观标准与疲劳状态影响明显。
缩短换型周期通过三维视觉重建与模型驱动轨迹等多种生成能力,实现路径自适应与参数快速更新,缩短换型周期。
多工位衔接通过多模态感知与多工位衔接能力,替代重复性操作,提升产线作业一致性与连续运行能力。
紧凑本体与实时规划结合紧凑本体设计与实时路径规划能力,在受限空间内实现多自由度协同作业。
高动态视觉感知通过高动态视觉感知,支持高速节拍,在高速运动中持续修正轨迹,实现速度与稳定性的平衡,提高成功率。
全量客观检测通过多谱视觉感知与机器学习模型等技术建立客观判定体系,实现全量客观检测与数据化反馈闭环,检测结果比较准确。
具身
核心应用环节
精密装配
精密装配(Assembly)涵盖屏幕贴合、模组安装及锁付等核心工序,难点在于针对微型零部件实现轨迹实时补偿,并引入触觉力控反馈,以应对高频换型带来的快速换线生产。
越疆科技协作机器人点涂胶作业
来源:越疆科技官网
越疆科技CR系列协作机器人已应用于3C产品涂胶与锁付工序,依托TrueMotion动力学模型,使运行轨迹精度低于±0.05mm,完成一次涂胶的效率是人工的3倍以上,减少人工补位需求,降低3C制造在精密装配环节的部署时间与人力成本投入。
外观检测
外观检测(AOI)负责识别产品表面各种细微且复杂的感官缺陷,难点在于建立标准统一的缺陷识别体系,减少对主观目检的依赖,并实现全量检测数据的闭环管理。

深慧视利用机器视觉完成标签检测
来源:深慧视官网
深慧视SERobot-SB机器人结合机器视觉,在联想福田保税区工厂,对4大类超过10处位置的51种规格标签进行自动检测,相对传统人工检测,其检测效率提升50%,准确率提升80%,年存储3.5PT图像数据,且实现了基于大数据的质量可追溯管理。
搬运与柔性上下料
搬运环节(Intralogistic)承担前端高频次的微小物料流转与分拣任务,难点在于增强对无序堆叠零部件的泛化识别能力,确保高频上下料的重复定位精度,并适应紧凑产线布局。
夸父机器人进行SMT料盘出库搬运
来源:乐聚智能官网
乐聚“夸父”机器人落地SMT物料出库场景,依托视觉识别与柔性抓取技术,准确识别、分类SMT料盘,以“轻拿轻放”的精细动作避免物料损伤,还能精准核查指定料盘信息,完成电子料仓高频次物料流转,并与产线系统达成无缝数据对接。
表面处理
表面处理(Surface Treatment)主要针对结构件进行抛光、喷砂与喷涂作业,难点在于实现复杂曲面的自适应轨迹规划,维持加工力度的恒定一致,并减少人员在恶劣环境下的暴露。
佳安智能机器人利用力控技术进行打磨抛光
来源:佳安智能官网
佳安智能的力控磨抛系统已应用于3C铝合金中框加工,加工误差小于±0.03mm。系统结合自适应路径规划,实现复杂曲面稳定加工,降低人工参与度,在使用磨轮打磨抛光过程中,通过力控磨料补偿功能,实现补偿量的动态调整,始终保证打磨轨迹与磨轮的贴合,提高磨抛稳定性。
具身智能
想知道文中的精美图谱是如何诞生的?
这有一份绘图秘籍:Nano Banana 2 发布后,这是我的图谱绘制心得(纯干货收藏版)
添加作者微信加入读者群交流?


实习研究员:紫函