半导体机械手行业分析
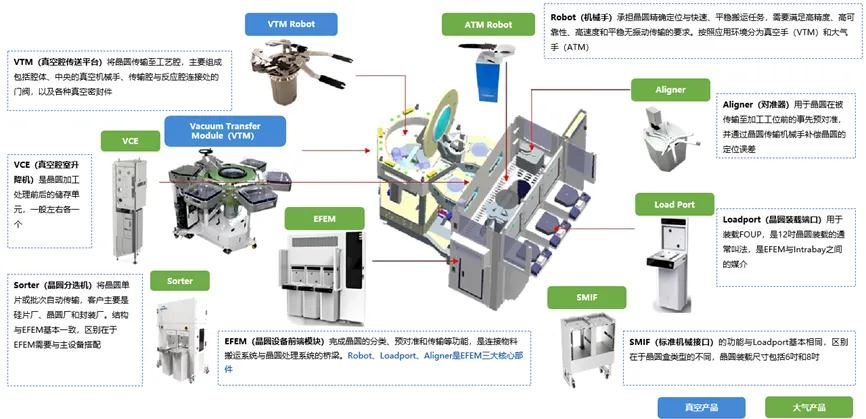
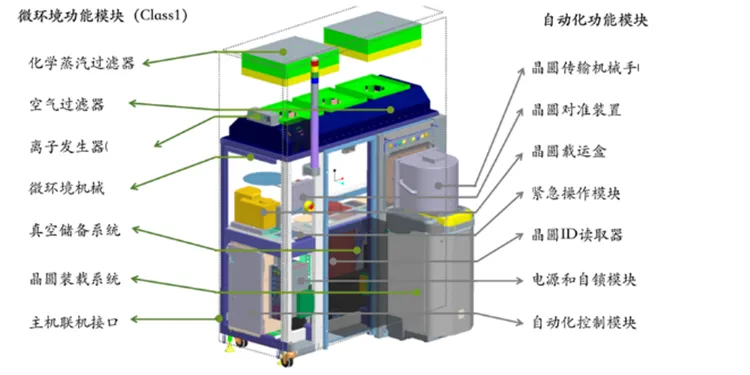
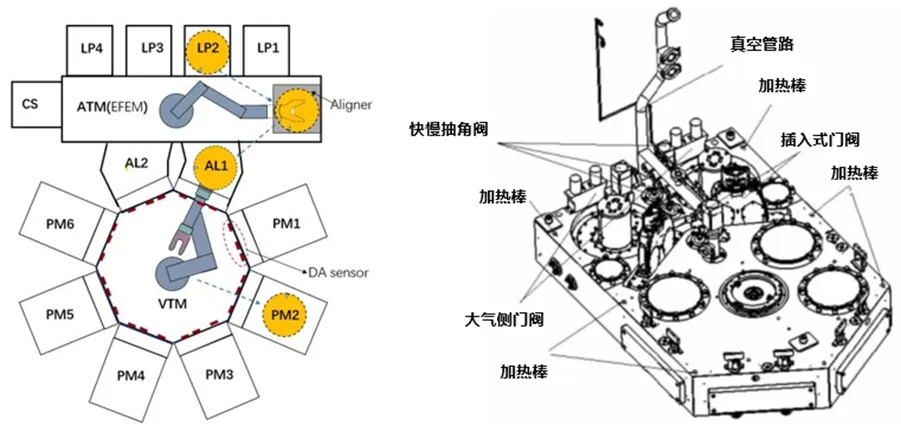
晶圆传输系统是半导体设备中不可或缺的重要模块,在薄膜沉积、刻蚀、量检测、清洗、CMP、离子注入等设备中有广泛的应用。对于具有反应腔室的设备,如薄膜沉积、刻蚀、离子注入设备等,晶圆传输系统可以分为大气产品(在大气环境中工作,EFEM)和真空产品(在真空环境中工作,VTM);而对于清洗、CMP、量检测设备等,晶圆传输系统以大气产品为主。1.2 EFEM(Equipment Front End Modules,设备前端模块)EFEM主要由大气机械手、晶圆装载端口(Loadport)、预对准装置(Aligner)组成,主要起到连接物料搬运系统与晶圆处理系统的桥梁作用。工作时,大气机械手尾部传感器扫描晶圆装载窗口(待加工硅片) 中硅片的数量,并检测有无晶圆叠片或者碎片(Mapping), 然后从中取出硅片,放置在预对准装置上,预对准装置对硅片进行预对准后,大气机械手将硅片传输到真空传输腔室。晶圆装载端口是连接EFEM与晶圆厂加工中心的桥梁,是EFEM的前端部分。其工作流程为OHT(天车系统)搬运晶圆盒至装载平台→装载平台上的夹紧机构锁紧晶圆盒→开盒装置吸附或夹持晶圆盒门→运输机械手对晶圆进行搬运→开盒装置对晶圆盒门和晶圆盒进行合并→夹紧机构对晶圆盒进行解锁→OHT搬离晶圆盒。预对准装置是在晶圆被传输至加工工位前,事先对晶圆旋转并进行预对准的系统。预对准的目的是对晶圆的中心位置和晶圆边缘的缺口位置进行定位,对圆心位置进行定位补偿,并将缺口方向旋转到指定的方向。1.3 VTM(Vacuum Transfer Module,真空传输平台)VTM是半导体设备中的真空传输模块,具有高度集成一体化的特点。传输腔室上有真空机械手安装孔、EFEM接口、真空系统接口、充气系统接口、腔室冷却系统接口、工艺腔室接口和AWC(光电对射)传感器。VTM外形设计有两个缓存密封接口,与EFEM相连接;设计有多个侧面,并提供安装工艺腔室的密封接口,可与工艺腔室连接;侧面的几何中心安装真空机械手,以此保证半导体晶圆在传输加工过程中均在高真空密封腔室中,保证精度与洁净度。另外为保持真空,VTM还要集成真空管路、门阀、角阀、低温泵、加热装置等。VTM工作流程如下:Aligner转好角度之后,大气机械手会抓取晶圆,将其送入Air Lock(大气真空转换的空间)。真空机械手在Air Lock中将晶圆抓取, Air Lock和反应腔靠近VTM一端有AWC传感器,会对晶圆的圆心进行计算,必要时进行补偿,相差过大时报警。真空机械手将晶圆传进反应腔开始晶圆工艺。待工艺结束后,再将晶圆逐步传到Air Lock ,再由大气机械手将其传出。与传入不同的是,晶圆传出过程中不再经过Aligner,部分工艺会产生副产物,可能会对尚未开始工艺的晶圆产生不良影响。此时,大气机械手会将晶圆暂存在CS (cooling station),待所有晶圆完成工艺后,再统一传出。图3. VTM俯视及测试结构图(数据来源:《300mm硅片高精度真空传输系统设计》、公开资料)机械手是EFEM与VTM中搬运晶圆的必备工具,需要极高的控制精度、运动速度、稳定性和可靠性,并且要在高洁净度的环境中运行。根据其使用环境,可以分为大气机械手及真空机械手,其中真空机械手对洁净度、精确度、晶圆固定方式等有更高的要求,并且由于真空机械手直接进入工艺腔,其技术壁垒和市场壁垒更高。根据其运动形式,半导体机械手主要分为R-θ 型(圆柱/极坐标型)、SCARA型(关节型)及蛙腿型(对称连杆型)。| 类型 | 简介 | 示意图 |
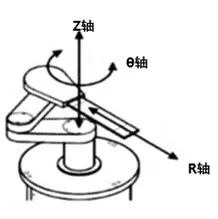
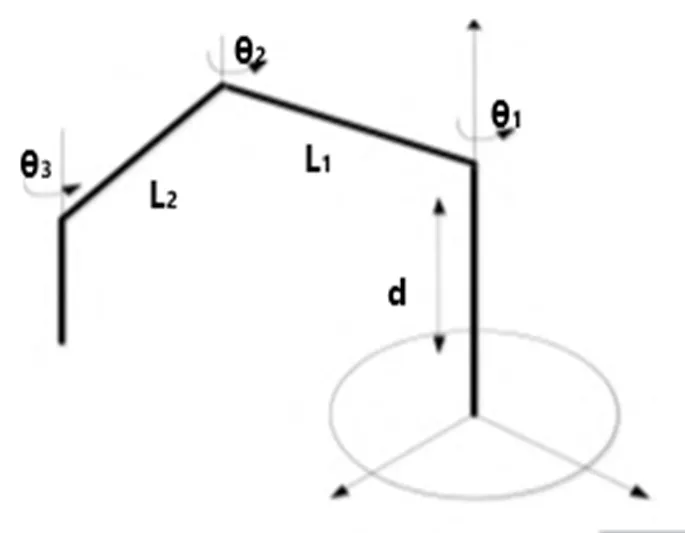
| R-θ型机械手 | 机械手有3个自由度,分别包括R轴(径向运动)、θ 轴(旋转运动)和Z轴(上下运动)。此结构的机械臂是通过带传动机构实现径向运动,其末端执行器始终指向旋转轴轴心,结构的突出特征是电机借助较复杂的带传动实现对前后臂关节的回转驱动,进而实现晶圆传输,机械手的手臂可以沿径向做直线运动。R-θ型机械手手臂结构紧凑、可靠性高,但刚性相对较低 | |
| SCARA型机械手 | 机械手有4个自由度,分别包括3个旋转运动和1个升降运动,分别为大臂回转、小臂回转、末端执行器回转及竖直升降运动,每个关节处都有一台独立的电机控制,从而保证了这些关节可以实现联动或单独运动,这种结构可以方便地实现对动作进行调整和对旋转角度进行补偿 | |
| 蛙腿型机械手 | 两个主动关节分别控制两个连杆,蛙手的旋转和伸缩运动由连杆L和连杆R的复合运动实现。蛙手型机械手刚性高,但钢带寿命有限,同步齿轮易产生粉尘 | |
数据来源:《晶圆传输机械手的实现途径及其结构设计》、《基于真空机械手运动控制与最优轨迹规划算法研究》
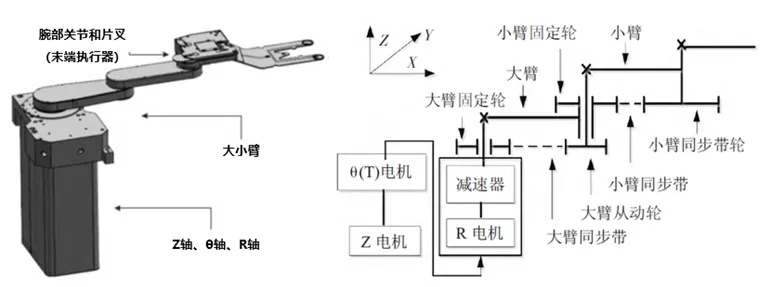
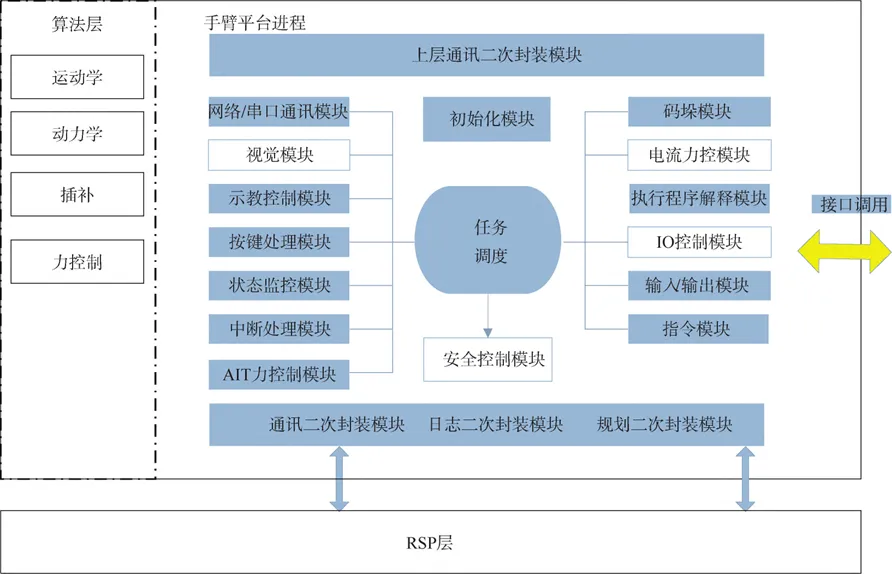
以R-θ型机械手为例,机械手由片叉(末端执行器)、腕部关节、电机、减速器、固定轮等组成。其中R轴电机经由谐波减速器后与大臂相连,大臂固定带轮与轴输出端固连;大臂从动带轮通过大臂同步带与大臂固定带轮相连且直接与小臂相连;小臂从动带轮通过小臂同步带与小臂固定带轮相连且直接与末端手相连。其核心部件片直接与晶圆接触,结构设计和材料的选择对传输机械手的精度、效率和可靠性以及洁净度等都会产生影响。末端执行器的基本尺寸应该满足料盒的尺寸规格,并通过结构设计、材料选择等减少运动惯量、增加结构刚度、优化片叉尺寸、选择接触方式。图4. R-θ型机械手架构及传动机理(数据来源:《晶圆传输机械手的实现途径及其结构设计》)机械手软件架构:主要由处理器、控制器系统、规划模块、RSP通信层等组成。其中,处理器用于运行运动控制算法、机器人算法、机器人任务分配、机器人引用中的一种,通过与共享内存进行数据交互,获取包含机器人变量、通讯方式的信息;控制器系统用于获取运动控制指令,并反馈机器人的状态信息;规划模块用于按一定的算法对机器人的位置进行数据点的插补细化工作;RSP通信层用于提供运动控制算法,通过处理器获得机器人位置、速度,并发给机器人控制器以完成平台的运动控制。
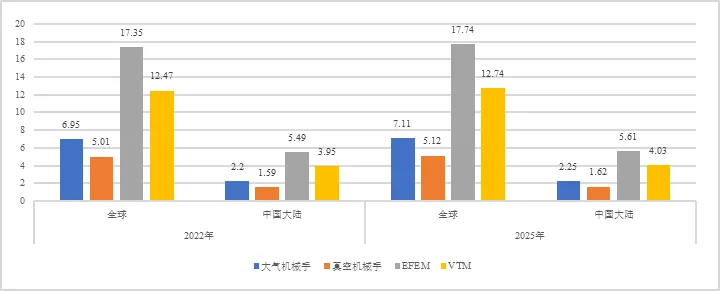
图5. 机械手软件架构示意图(数据来源:《基于真空机械手运动控制与最优轨迹规划算法研究》)安芯投资根据国内主要半导体设备上市公司采购直接材料占比及毛利率,测算出半导体设备直接材料成本占半导体设备市场比例,并参考各类设备龙头公司数据,得出机械手及EFEM、VTM占直接材料成本比例,最后得出半导体机械手及EFEM、VTM等模组相应的市场规模。根据测算,2022年全球大气机械手市场规模为6.95亿美元,真空机械手市场规模为5.01亿美元,EFEM市场规模为17.35亿美元,VTM市场规模为12.47亿美元。中国大陆市场规模占全球的32%左右。
图6. 全球及中国半导体机械手及模组市场规模(单位:亿美元)半导体机械手需要机械、电气和算法三方面的理论基础与实践经验,并结合具体应用要求进行复杂的运动规划、误差补偿和运动学、动力学计算、组装装配,实现运动控制的高精度、高速度和平稳无振动传输,技术壁垒极高。目前,国产半导体设备市占率日益提升,且美日对中国半导体设备零部件禁运愈加严格。机械手作为半导体设备中的核心零部件,面临迫切的国产替代需求,值得选择优质标的深度布局。

资料合集内部分电子书籍截图

资料合集内部分课件PPT截图