



执行摘要
2026年3月,随着“Dimensional项目”在开源社区与社交媒体上的出圈,一场关于“具身智能”实现路径的讨论达到了高潮。该项目核心在于将爆红的AI代理框架OpenClaw与宇树科技的人形机器人Unitree G1深度融合,实现了机器人对复杂任务的实时感知与自主执行,被业界誉为打破了传统机器人开发的“代码依赖”魔咒。
本报告旨在从专业技术视角,深度剖析Dimensional项目的技术实施架构、现状瓶颈,并结合近期产业动态(如特斯拉Digital Optimus计划、NVIDIA GTC 2026物理智能进展),厘清“代理即大脑”这一趋势背后的真实逻辑与长远影响。我们认为,Dimensional项目并非底层技术的颠覆,而是一种应用层范式的高效重构,它标志着机器人行业正从“模型驱动”向“代理驱动”快速演进。
1. 事件背景:从“赛博养虾”到“物理具身”
OpenClaw最初作为一个开源AI桌面代理框架,因能自主调用电脑工具、处理复杂文档而走红,被网友戏称为“赛博养虾”。然而,真正的行业震动始于其走出屏幕,与物理世界相连。
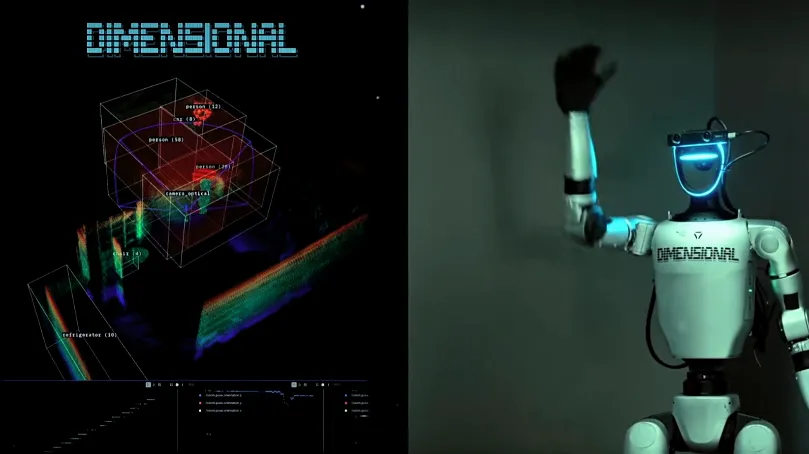
Dimensional项目的标志性意义在于,开发者通过将OpenClaw接入宇树G1人形机器人,展示了前所未有的能力:机器人不再需要针对特定任务进行繁琐的代码编写或模型微调,仅通过自然语言指令,即可完成如“把桌面零件分类”、“做汤圆”等复合型物理任务。
这一事件迅速发酵,引发了包括马斯克的关注。华鑫证券近期研报披露,马斯克已证实将采用同款逻辑开发“Digital Optimus”,利用xAI的Grok大模型作为“总指挥”,通过视觉语言模型理解屏幕与外界环境,计划在6个月左右面向用户体验开放。这标志着硅谷顶级力量对这一技术路径的正式认可。
2. 技术实施深度解析:不是新大脑,而是超级项目经理
要理解Dimensional项目的专业价值,必须厘清OpenClaw在机器人系统中的真实生态位。通过与多位一线研发人员的对话及技术拆解,其实施方式呈现明显的分层架构:
2.1 系统架构:三层堆栈的重新组织
传统的机器人系统高度耦合,而Dimensional项目的实施依赖于底层硬件的模块化成熟。宇树G1本身具备强大的运动控制能力(23-43个关节、最大关节扭矩120N.m、深度相机+3D激光雷达),这为上层智能提供了可执行的物理基础。
实施架构主要分为三层:
决策与编排层(OpenClaw代理层):作为系统的“项目经理”。接收自然语言指令,利用大模型的推理能力拆解任务,并调用预定义的Skill库。例如,当指令为“整理桌面”时,OpenClaw负责识别物体、决定抓取顺序、规划“走到A点-抓取-放置到B点”的逻辑流。
技能调用层(SDK与ROS接口):此处是关键的技术桥梁。近期出现的RosClaw等项目修改了OpenClaw源码,植入了机器人操作系统(ROS)的功能。这使得OpenClaw能够调用G1的底层能力,如导航、避障、关节控制,而不必关心底层的电机正反转。
物理执行层(G1本体):G1负责具体的轨迹规划与实时控制。OpenClaw的决策最终转化为对G1的API调用,例如“前进一米”、“左转45度”。
2.2 核心突破:空间记忆与动态拼接
Dimensional项目之所以看起来“智能”,关键在于两点:
空间记忆能力:这常被误认为是OpenClaw的功劳,实则是SpatialRAG(空间检索增强生成)技术的应用。它将环境视频/点云构建为可调用的空间数据库,使机器人记住“哪里有什么”,OpenClaw仅负责查询该数据库。
技能拼接:OpenClaw展现了强大的泛化能力,能将“开瓶”、“倒水”等基础技能动态拼接成“倒水喝”这样的复合任务,打破了传统机器人只能重复预设脚本的僵局。
表:Dimensional项目技术实施与传统机器人开发的对比
3. 行业现状:祛魅与校准——现实比神话更骨感
在“MIT天才”、“马斯克跟进”等光环下,专业视角需要一场冷静的祛魅。当前的行业现状呈现典型的“二八定律”:20%的 hype 背后,是80%亟待解决的工程难题。
3.1 能力边界:强在流程,弱在控制
多位本体厂商技术负责人向媒体指出,OpenClaw并未赋予机器人新的物理能力,它只是让现有能力的调用过程更智能。
现状局限:响应慢(需多次调用大模型)、可靠性存疑(开环系统易错)、存在安全隐患(曾出现删除自身开发环境的案例)。
研发定位:目前大多数厂商仅将此类代理用于封闭环境中的实验,或作为内部的“项目管理工具”追踪开发进度,而非直接用于生产执行。
3.2 硬件基石:国产机器人的成熟度红利
Dimensional项目的成功离不开宇树G1这样的硬件平台。9.9万元的价格、稳定的双足运动算法(如“反重力”抗摔)、开放的SDK接口,使得开发者拥有了一个标准的物理执行载体。没有G1在运动控制上的成熟,OpenClaw的智能只能是空中楼阁。
3.3 基准测试的缺失:行业呼唤统一标尺
随着各类“代理+机器人”演示泛滥,如何客观评估性能成为焦点。在NVIDIA GTC 2026大会上,ADI首次预发布了一项“工业灵巧度基准测试方案”,针对数据中心线缆操作、汽车线束安装等场景,试图建立从仿真到现实的评估标准。这表明行业正在从炫技走向务实,要求代理驱动的机器人拿出可量化的性能指标。
4. 热点事件映射:巨头赛跑与生态博弈
Dimensional项目的走红并非孤立事件,它恰好发生在产业格局重塑的关键节点。
4.1 特斯拉的“Digital Optimus”逻辑映射
马斯克宣布的Digital Optimus计划,本质上是将Grok模型作为特斯拉汽车的“导航者”,实时分析屏幕视频并执行操作。这与人形机器人的逻辑完全一致。特斯拉正在设计的AI5/AI6芯片以及自建Terafab芯片工厂,目标正是为了解决Dimensional项目当前面临的算力瓶颈与延迟问题,实现端侧的实时智能。
4.2 Figure 03的全自主作业
几乎同一时间,Figure 03展示了在家庭环境中全自主完成家务的视频,全程无人工干预。这表明Figure在视觉-语言-动作模型方面走了更深度的融合路线,与OpenClaw的“代理调度”路线形成鲜明对比。这是当前行业最核心的路线之争:是让VLA模型直接输出动作,还是让代理模型调度现有Skill库?Dimensional项目显然是后者的典型代表。
4.3 仿真到现实的鸿沟弥合
NVIDIA GTC 2026上,Movensys展示的实时执行堆栈研究显示,通过基于EtherCAT的实时通信,可将AI决策与底层控制的延迟导致的误差降低约85%。这为解决“代理反应慢”提供了基础设施层的解决方案。同时,ADI与Synopsys的合作展示了高保真数字孪生在触觉传感器开发中的应用,旨在缩小仿真与现实的差距。

5. 结论与展望:代理即服务,硬件即平台
Dimensional项目的出圈,虽然夹杂着媒体神话和个人英雄主义色彩,但其内核揭示了一个不可逆的趋势:在具身智能领域,上层智能正在快速通用化和代理化,而核心竞争力正在向硬件执行力与底层实时控制下沉。
对于有经验的行业人士而言,这份报告希望传递以下核心观点:
1.关于OpenClaw:它不是终结者的大脑,而是开源的“项目经理”。它的最大遗产是教会行业如何用自然语言和Agent框架,将现有的机器人能力像乐高一样拼起来。
2.关于宇树G1:它证明了国产机器人本体在运动控制和性价比上已具备世界级水平,成为各类AI算法最佳的物理“白盒”试验平台。
3.未来竞争壁垒:
短期看:谁能建立最丰富、最稳定的机器人Skill库,谁就能在代理调度时代占据生态位。
中期看:谁能解决端侧大模型的实时性与可靠性(如特斯拉自研芯片、Movensys实时控制栈),谁就能推出真正的“代理原生”机器人。
长期看:数据飞轮至关重要。代理驱动的机器人能更高效地采集物理交互数据,反哺底层VLA模型的训练,形成“越用越强”的闭环。