


2
研究进展
2.1 激活函数的选择
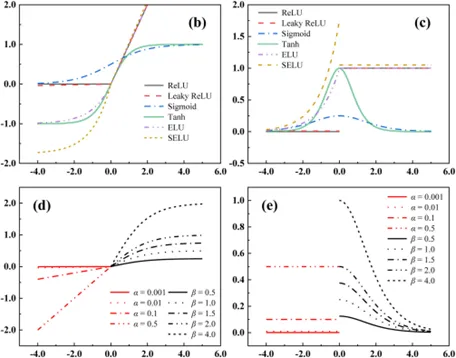
图1.常见激活函数(b)和其导数(c),Leaky Sigmoid(d)和其导数(e)[1]
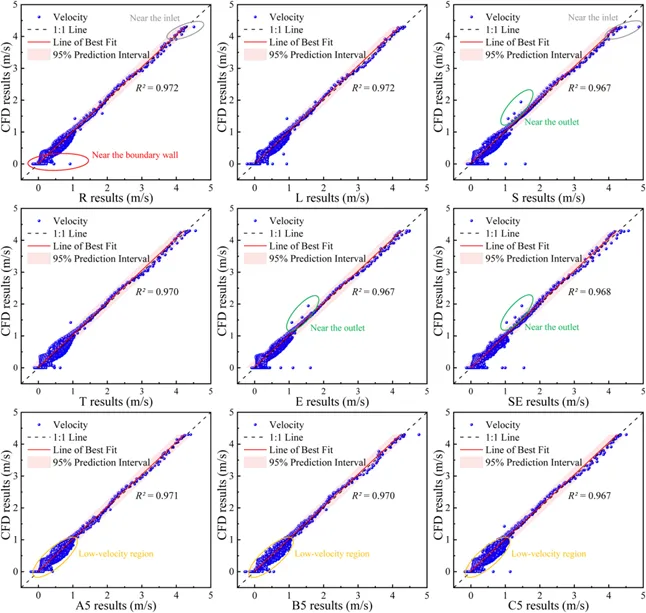
图2.不同激活函数的模型预测结果决定系数。灰圈表示送气口附近。红圈表示边界墙附近。绿圈表示出口附近。黄圈表示低速区域[1]
2.2 时滞效应
为了解决现有数据驱动模型无法有效捕捉温度动态的时滞效应和非线性特征的问题,Mu等人[2]提出了时滞互相关Transformer模型。该研究将冬季采集到的时间序列进行重构,计算室内温度序列与不同时间延迟τ下室外温度、风速、供水温度序列的皮尔逊相关系数,然后将多个时滞下计算得到的相关系数按行排列为新矩阵,通过时滞互相关聚合块,获得不同时滞的权重,确定时滞依赖性。该模型均方根误差、平均绝对误差和平均绝对百分比误差分别为0.6918、0.5662和0.8842。低于其他的Transformer模型和常用的MLP、LSTM等模型。
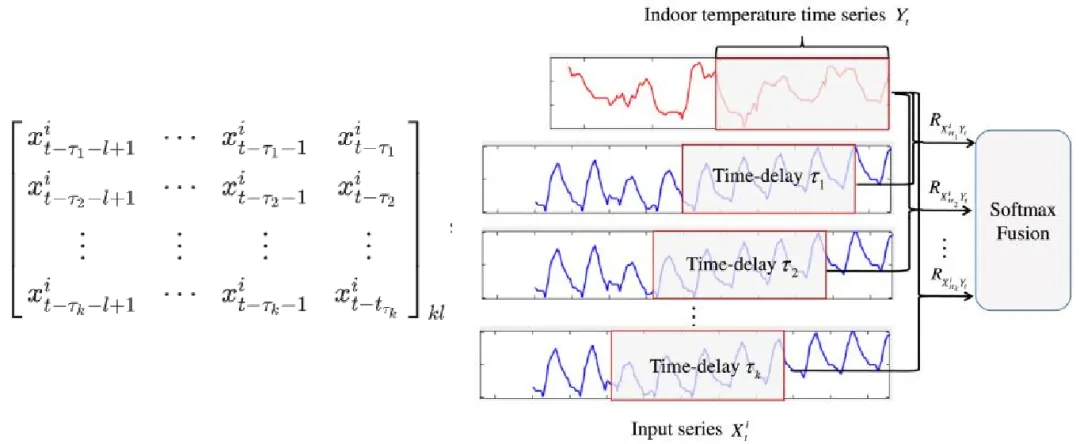
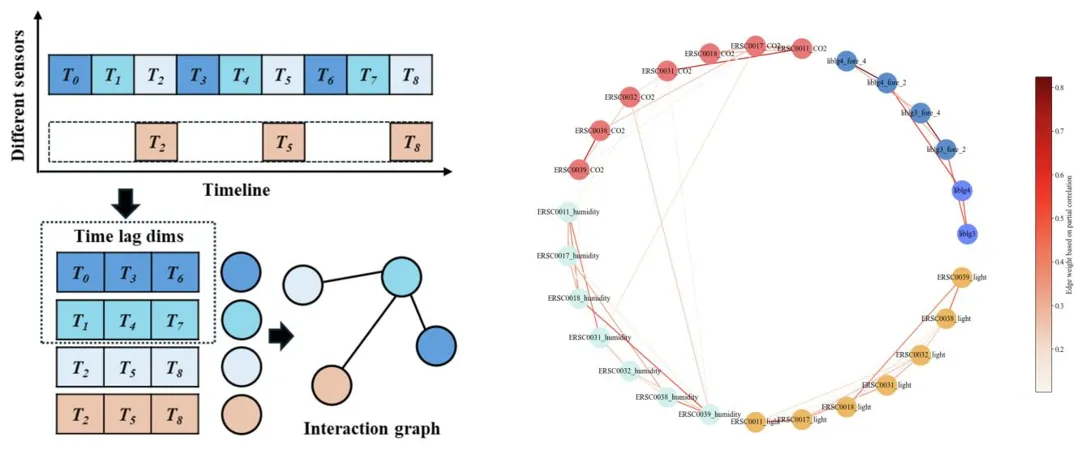
图3.时滞矩阵[2]和图4.时滞集合计算[2]
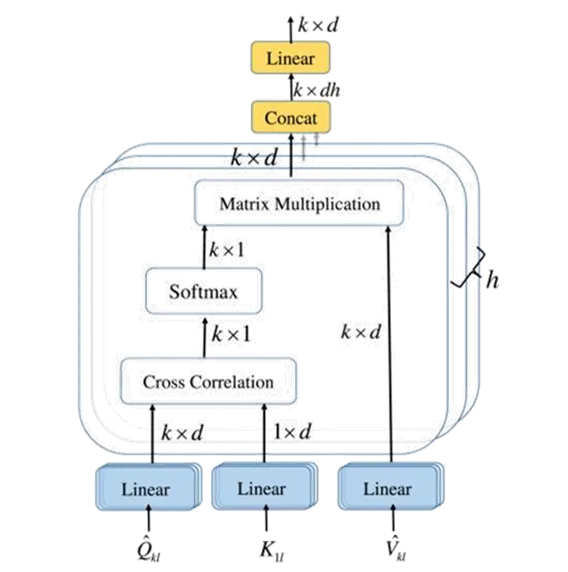
图5.互相关块[2]
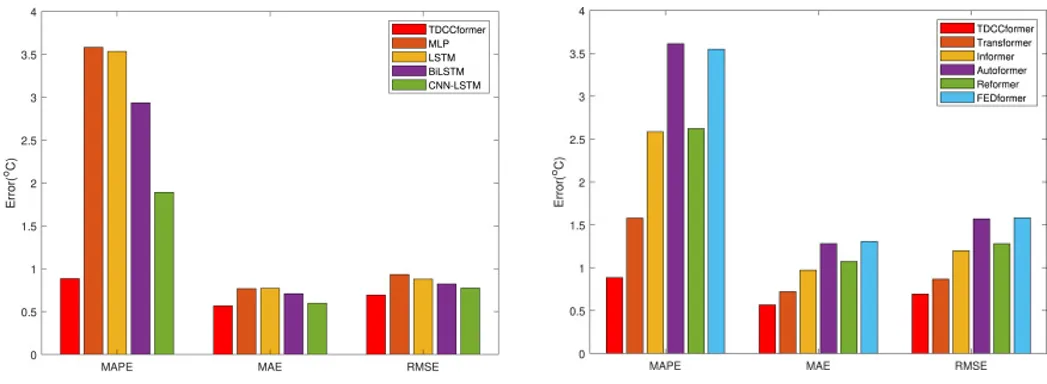
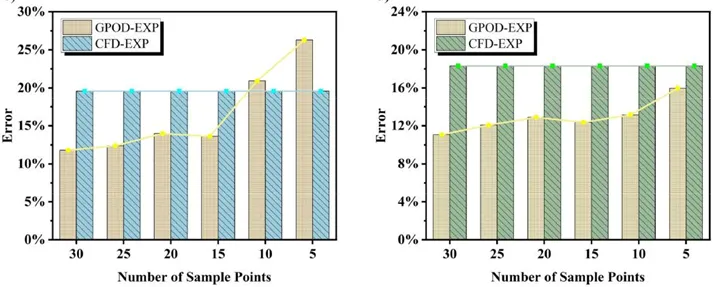
图6. TDCCformer模型和其他常用模型和Transformer模型的误差[2]

3
总结
4
参考文献
[1] X. Hu, Effects of different activation functions on multilayer perceptron performance for predicting indoor airflow fields, Building and Environment 285 (2025) 113680.
[2] Z. Mu, Y. Chen, H. Pan, Y. Jiang, Novel Transformer-like predictive model for improving the accuracy of indoor-temperature prediction, Applied Thermal Engineering 278 (2025) 127120.
[3]C. Huang, H.H.L. Kwok, K.H. Poon, Z. Wu, F. Hou, J. Ma, J.C.P. Cheng, Graph-based spatial–temporal prediction and feature interaction analysis of CO2 and occupant in large indoor space, Building and Environment 280 (2025) 112963.
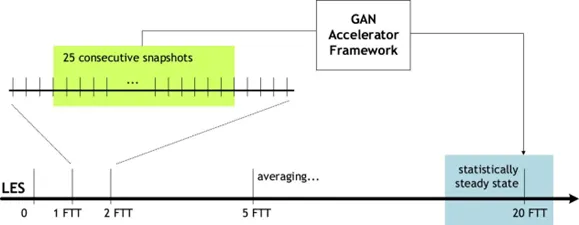
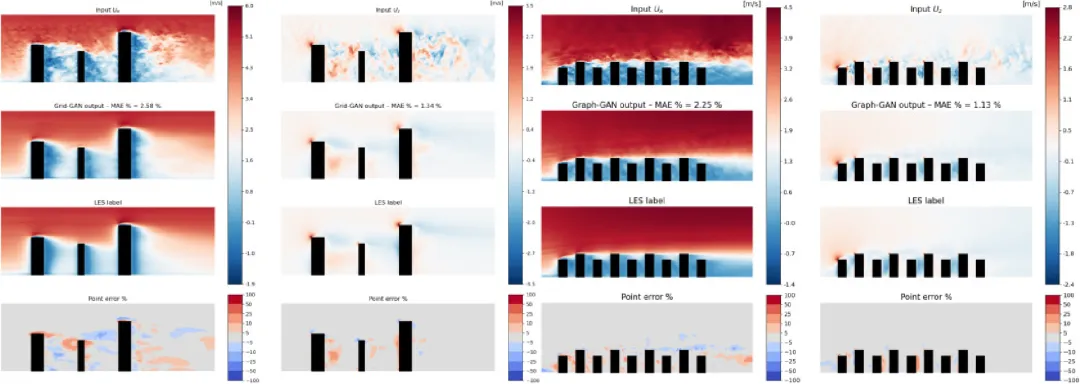
[4] G. Calzolari, W. Liu, Accelerating Large Eddy Simulations of Urban Airflow with Generative Adversarial Networks, Building and Environment 286 (2025) 113622.
[5] K. Jiang, Predictive modelling and multi-scenario validation of indoor micro-climate thermal-humidity conditions, Journal of Building Engineering 111 (2025) 113474.
[6] K. Jiang, Optimization of air supply parameters for predicting indoor temperature and humidity under indoor mold index constraints, Energy and Buildings 345 (2025) 116050.
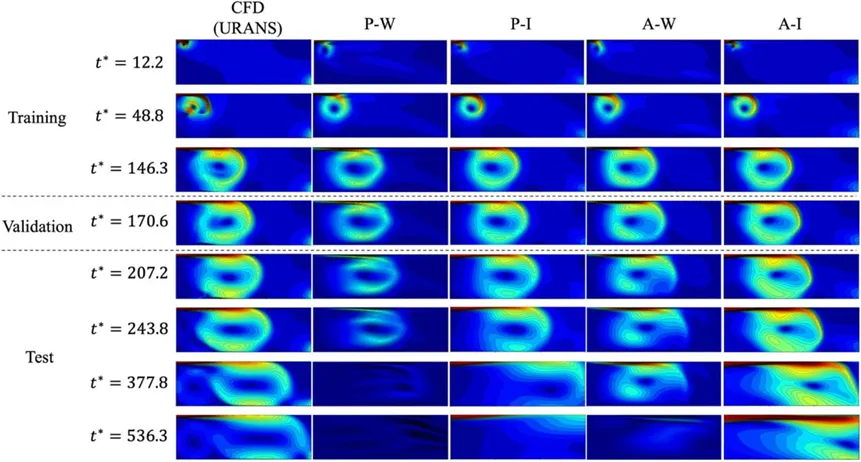
[7] C. Wei, R. Ooka, Applying a physics-informed neural network to an indoor airflow time-extrapolation prediction, Building and Environment 282 (2025) 113246.
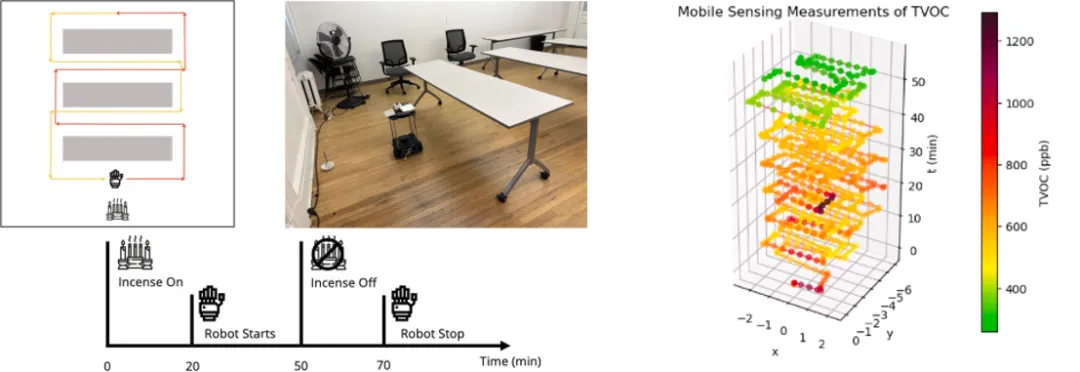
[8] W. Liang, Y. Zhang, A. Chong, E.C. Hameen, V. Loftness, Exploring Gaussian Process Regression for indoor environmental quality: Spatiotemporal thermal and air quality modeling with mobile sensing, Building and Environment 281 (2025) 113143.
[9] L. Hu, Z. Liu, Y. Sun, R. Rong, C. Hu, A data-driven approach to estimate flow fields from sparse distributed sensors in negative pressure wards, Building and Environment 281 (2025) 113212.
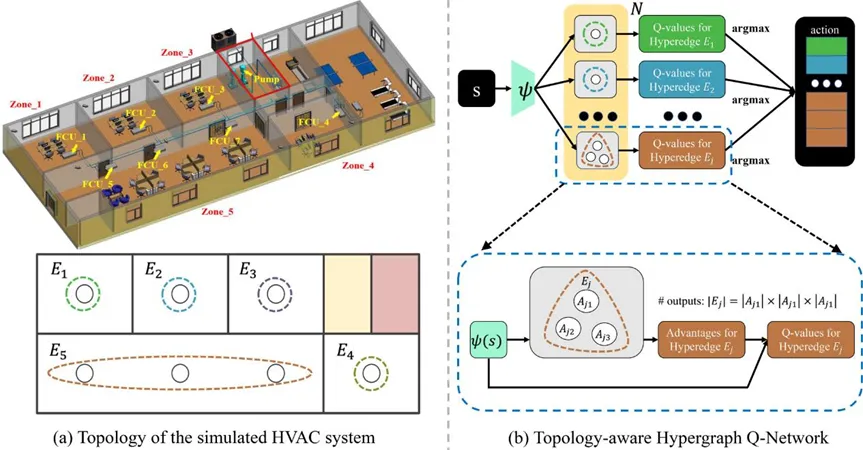
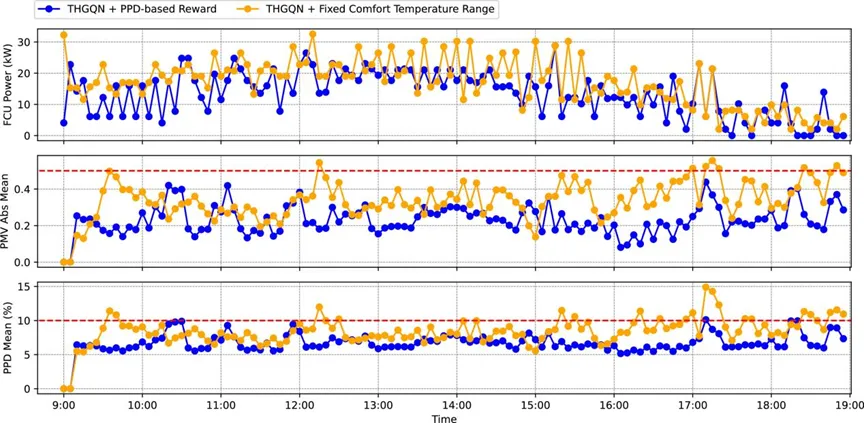
[10] D. Zhong, T. Xing, K. Sun, Z. Zhang, Q. Zhao, J. Kang, Topology-aware hypergraph reinforcement learning for indoor occupant-centric HVAC control, Energy and Buildings 347 (2025) 116219.
图文内容:郑雨霖
编辑:方中乐
浙大C.S.E.
欢迎关注我们!