


当前,人形机器人技术正处于从实验室原型向商业化部署的关键转型期。在2025至2026年间,全球范围内涌现了前所未有的技术突破和市场投资,特别是在AI与硬件融合方面的进展。然而,尽管感知和决策能力迅速趋近人类水平,人形机器人仍然面临能量密度、动态平衡、灵巧操作和自主性等多项物理约束。其中电池续航限制(目前仅2-4小时)、成本高企(单位成本30,000至500,000美元)以及安全标准缺失等近期可解决的技术障碍正在被积极攻克,但某些基于物理极限和工程权衡的约束(如双足机器人的能量效率问题)在可预见的未来仍难以根本克服。全球市场规模预计将从2025年的29.2亿美元增长至2030年的152.6亿美元,复合增长率达39.2%,其中制造、物流、医疗和空间探索等领域将率先实现规模化部署。本报告通过系统分析技术现状、制约因素及发展路径,为理解人形机器人产业未来提供量化依据。
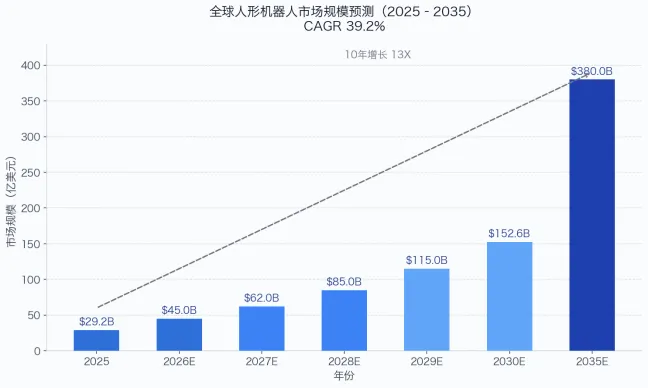
图1:全球人形机器人市场规模预测(2025-2035)
当前人形机器人的发展现状与技术进展
人形机器人产业在2026年迎来了历史性的转折点。根据最新的商业部署数据,全球已有超过16,000台人形机器人完成安装,预计到2027年底累计装机量将超过100,000台[14]。这种指数级增长反映了技术成熟度的显著提升和市场需求的真实存在。与此同时,中国在2025年被官方宣布为人形机器人大规模生产的"元年",超过140家国内制造商共推出330多种不同型号的人形机器人,标志着从核心技术竞争向规模化应用转变[13][16]。
从硬件性能维度看,当前一流的人形机器人平台已经展现出令人瞩目的能力。Figure AI的第三代人形机器人(Figure 03)在加州总部实现了多机协同运作,CEO布雷特·阿德科克(Brett Adcock)宣布计划在2026年将机器人部署到生产线上,并在24个月内实现机器人自主构造其他机器人的目标[1]。与此同时,该公司预测到2026年底,家用机器人将能够在未见过的环境中完成长期任务,同时硬件系统将达到外科手术级别的精度[1]。Tesla的Optimus机器人在过去一年中也取得了重大飞跃,现已能够自信地行走、运输物体、导航空间,并利用源自自动驾驶技术的神经网络学习新任务[6]。
在感知和AI能力方面,多模态感知-决策框架正在成为新一代人形机器人的核心架构。最新研究表明,机器人通过整合视觉、语言、触觉和本体感觉等多种感觉模态可以形成对环境和人类用户更全面的理解[8]。NVIDIA与多所大学共同推出的DreamDojo是一项突破性的通用机器人世界模型,在44,000小时以上的人类第一视角视频上进行预训练,实现了接近真实物理的模拟、灵巧控制和10-11帧/秒的实时推理速度,为人形机器人在未知对象和环境中的泛化能力提供了新的可能性[1]。
在成本和可用性方面,人形机器人正在经历明显的民主化过程。虽然Boston Dynamics的Atlas等高端研究平台成本超过500,000美元[5],但企业级和入门级产品的价格已经大幅下降。Tesla目标为Optimus第三代定价20,000-30,000美元,Unitree等中国企业推出的低成本模型已经进入5,000-20,000美元的价格带[7]。市场分析预测,随着制造规模扩大和技术成熟,单位成本将继续下降,Goldman Sachs预计到2035年市场规模将达到380亿美元[7]。
在应用部署方面,人形机器人已经从孤立的实验室演示进入实际的商业运营环境。BMW正在其南卡罗来纳州Spartanburg工厂使用Figure 02机器人进行材料搬运和零件输送[14]。Amazon、GXO Logistics和Spanx等企业已经部署了Agility Robotics的Digit人形机器人,用于仓库物流操作[14]。Diligent Robotics的Moxi在医疗机构进行临床试用,已经证明能将护士的步行时间减少30%[14]。这些真实部署标志着人形机器人从原型验证阶段向实际价值创造阶段的过渡。
人形机器人面临的技术制约因素
尽管取得了显著进步,人形机器人的广泛部署仍然受到五大关键技术瓶颈的严重制约,这些瓶颈横跨能量系统、机械稳定性、操作灵巧性、自主智能和安全规范等多个维度。

图
1、能量密度与续航时间困境
电池续航时间是当前制约人形机器人商业化的单一最严重的瓶颈[2]。绝大多数人形机器人在单次充电下仅能运行90分钟至2小时,而工业应用场景通常要求8-20小时的连续运作能力[2]。这一40倍的能力差距不仅限制了机器人的实际使用价值,还要求运营商投入额外的基础设施成本来实现热交换协议或间歇充电站[2]。
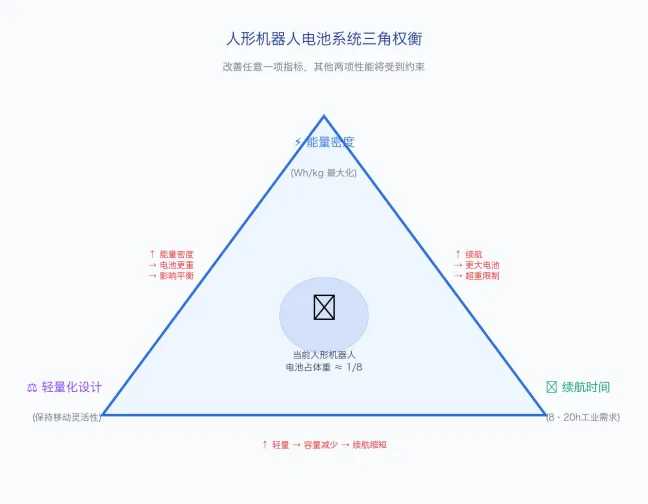
问题的根本原因在于人形机器人面临独特的物理约束。与电动汽车可将其总质量的三分之一以上用于电池系统不同,人形机器人为了维持平衡和敏捷性,电池重量仅限于总质量的八分之一左右[2]。这种权衡强制工程师进行三向折衷:最大化能量密度(瓦时/公斤)、最小化总重量以保持移动性、实现充分的运行时间。改进其中任何一个方面往往会损害其他方面的性能。
能量消耗的极端不效率性进一步加剧了这一困境。Tesla的Optimus机器人在简单行走时消耗约500瓦功率,而人类进行更需体力的快步行走仅需约310瓦[22]。这意味着机器人完成更简单的任务所需能量反而高出近45%,这种低效率表明当前的双足设计架构存在根本性的能量学缺陷[22]。
当前解决方案主要依赖锂离子电池,预计在未来3-5年内仍将是默认选择[2]。虽然锌-空气电池和量子点电池等替代化学体系在理论上承诺更高的能量密度,但大多数仍处于商业前期开发阶段[2]。热管理风险也不容忽视—在峰值性能期间,电池温度可在数秒内飙升至100°C以上,产生热失控条件威胁,可能危及机器人和附近工作人员的安全[2]。
2、动态平衡与稳定性挑战
图
与具有被动稳定状态的轮式机器人不同,人形机器人的双足设计要求持续的"主动稳定性",即机器人必须不断消耗能量和计算资源来维持直立状态,即使在静止不动时也不例外[2]。这一根本性的设计约束使得双足人形机器人处于持续的动态平衡计算中,每秒需进行数百万次微小的姿态调整。
失去电源对人形机器人构成严重的安全风险。一旦断电,机器人会立即倒塌,因为没有"被动"稳定状态来维持其挺立状态——这与具有静止稳定性的轮式系统形成鲜明对比[2]。由于人形机器人通常重50-150磅,且不具备轻量级研究机器人那样"恢复失误"的能力,若机器人倒在人身上可能造成严重伤害[2]。
高调的失败案例突出了这些持续存在的稳定性挑战。多起有记录的倒塌事件发生在贸易展和演示中,这些公众失败凸显了受控实验室条件与真实可靠性之间的巨大差距[2]。因此,当前大多数部署都将人形机器人与人工作业人员物理隔离,使用障碍或限制区域[2]。虽然这种隔离方法限制了其效用和人机协作的核心价值主张,但它为逐步实现真正的人机协作提供了一条务实的路径。
3、灵巧操作的复杂性
实现全面的灵巧操作需要机器人具备安全处理形状、尺寸和材料各异的物体、执行精细任务且不造成损伤的能力[2]。多指手的灵巧性特别困难,因为具有高自由度且交互空间更加复杂多样,这极大地增加了强化学习等算法在高维空间搜索的难度[12]。多指手与物体接触点众多,导致力学特性复杂多样,进一步加大了手指灵巧操作技能学习的难度[12]。
灵活物体、透明物体、软物体和可变形物体(如医疗手术中的人体组织)的操作特别具有挑战性[12]。目前的机器人系统通常采用"超刚性、超精确"的动力学控制,这与人类流畅自然地操纵物体的方式形成鲜明对比[9]。人类在打开门时不需多想便能进行路径规划和轨迹计算——只需在关节设置低刚度、抓住把手并向后拉"大概"方向即可,而当前机器人需执行更明确的测量和规划[9]。
触觉反馈系统的发展仍然滞后。虽然视觉系统通过合成图像得到了巨大改进,但无法从合成数据中获得触觉输入源,仅靠视觉对所有抓握任务而言不足[2]。Shadow Hand在每个指尖下的聚氨酯皮肤上使用34个触觉传感器,但这样的高密度传感仍然需要与先进的神经网络和运动规划算法相结合才能实现人类级别的灵巧性[20]。
4、自主性与决策能力缺口
尽管展示令人印象深刻,当前大多数人形机器人在导航、操作和任务切换方面仍严重依赖人工监督[2]。许多展示通过精心设计的环境、简化场景或未披露的远程监督来掩盖这些局限[2]。任务泛化能力的问题尤为突出——在特定任务上进行过大量训练的机器人,一旦面临轻微变化(不同的抓握角度、略微不同的尺寸或改变的放置位置),往往会失败[2]。每种新的变化实质上都成为需要额外训练数据的新任务。
在结构化和非结构化环境之间存在明确的分界线。机器人可在映射区域、预测布局和受限场景中相对可靠地运作,但在杂乱房间、户外空间或不熟悉的建筑中经常失败[20]。自然语言理解虽在进步,但嘈杂环境会限制语音界面的有效性,机器人尚无法在不可预测的任务上与人类无缝协作[20]。
5、安全规范与监管真空
人形机器人的安全要求与传统工业机器人根本不同。它们结合了可观的质量(50-190磅)、主动稳定系统和与人类的预期邻近性,产生了需要全新安全框架的碰撞和跌落风险[2]。静止工业臂可被隔离,而人形机器人设计用于与人类并肩工作,因此出错的余地更小。
监管基础设施正在赶上技术发展。IEEE的国际标准ISO 25785-1草案专门针对人形机器人安全,仅在2025年5月发布,这意味着业界在没有既定安全基准的情况下一直在部署机器人[2]。这个监管真空使制造商、雇主和工作者缺乏关于可接受风险水平的明确指南。
创新速度与安全进展之间存在内在张力。公司面临快速部署的压力以抢占市场份额并证明巨额投资的合理性,而彻底的安全测试需要时间、大量真实场景试验和保守的迭代过程[2]。这种部署速度与适当验证之间的冲突导致机器人可能在其失效模式尚未完全理解前进入工作场所。当前部署反映了这些未解决的安全顾虑——大多数人形机器人在受控、围栏环保环境中运作,与人工作业人员物理隔离,实质上被视为传统工业机器人对待,尽管其设计意图是协作[2]。
近期有望攻克的技术障碍
虽然某些物理约束在可预见的未来可能无法根本解决,但多项关键的技术障碍预计将在2-3年内取得重大突破,特别是在AI能力、能源管理和灵巧控制方面。
1、生成式AI与决策自主性的加速发展
感知和决策能力正在以前所未有的速度向人类同等水平迈进。当前的主要转变涉及从基于规则的自动化向智能、自我进化系统的转变[3]。生成式AI创建新输出并使机器人能够自主学习新任务并通过仿真生成训练数据[3]。一个进一步提高机器人自主性的关键趋势是代理式AI的发展,它结合了结构化决策的分析AI和适应性的生成AI[3]。
多模态感知-决策框架的快速成熟预示着自主能力的近期突破。将视觉、语言和行动集成的视觉-语言-行动框架正在成为行业标准[8]。NVIDIA的Cosmos和Google的Gemini等基础世界模型设计用于增强机器人的环境理解,弥合感知与规划的鸿沟,赋予机器人"提前思考"而非盲目反应的能力[18]。
实现这一突破的一个关键推动力是大规模合成数据的生成。NVIDIA的Isaac Sim平台和Omniverse生态系统已经使开发者能够在虚拟环境中训练机器人,然后在物理部署前验证策略[28]。这种仿真-现实转移方法可以将原本需要数月的物理数据收集压缩到数周。预计到2027年,当规范问题、安全问题和投资回报率问题大多解决后,人形机器人市场将迎来一个拐点[18]。
2、能源管理与电池技术的渐进式改进
虽然电池技术本身的突破仍不确定,但能源管理系统正在取得显著进展。中国的UB Tech公司推出了具有双电池系统和电池交换能力的Walker S2机器人,理论上使其能够全天24小时连续工作而无需人工协助[19]。该系统可在仅3分钟内完成电池交换过程,尽管有评论指出在生产规模上这可能导致显著的运营复杂性[19]。
替代电池化学成分的渐进式改进预计将在未来三年内产生实际影响。虽然完全革命性的电池技术(如固态或量子点电池)可能仍需数年才能实现商业化,但Li-ion电池能量密度的增量改进预计将使运行时间扩展至4-6小时[2]。制造工艺的优化和热管理系统的改进也将减轻过热风险,增强安全性和可靠性。
关键的近期改进战略包括热混合架构,结合不同的电池化学、快速充电基础设施的标准化,以及能源消耗算法的优化。几家主要制造商已经在部署这些混合方法,在生产线环境中实现了4-8小时的有效运行时间,虽然这需要预计划的能源恢复间隔[20]。
3、灵巧操作能力的技术飞跃
灵巧操作领域正在经历多项融合创新。人类演示学习通过HaptX手套等沉浸式界面,使操作者能够自然地完成任务,其动作被直接映射到具有多个自由度的灵活末端执行器[9]。这种方法结合深度学习已经展现出显著承诺,使机器人能够学习流体、自然的操纵动作而非刚性的预编程路径。
基础世界模型的发展对灵巧操作能力构成了根本性改进。DreamDojo通过在44,000小时人类视频上的预训练,已经学会了综合的物理知识,使得在接触丰富、精确的交互中表现得更加真实[1]。这种人类规模数据的预训练使模型能够比之前的基线更好地泛化到新物体和环境。
替代致动技术也正在出现。Kyber Labs正在开发由电磁场驱动的人工肌肉,比人类肌肉更强大,消除了传统齿轮箱的需求[9]。这使得公司能够应用大规模机器学习,快速向具有完整灵巧操作的机器人迈进,因为传统电机和齿轮箱已到达优化极限,且设计初期并未考虑机器学习控制[9]。预计这些替代致动系统将在2026-2027年间实现商业可用性,显著提升双指手系统的性能。
长期难以攻克的系统性约束
相比之下,某些基于基本物理原理和工程权衡的约束,预计在可预见的未来(十年或更长时间内)将难以根本性地解决。
1、双足设计的能量效率困境
人形机器人最基本的设计选择——采用双足而非轮式或履带式配置——内在地引入了能量不效率。双足运动需要持续维持动态平衡,这需要每秒进行大量的微调,消耗的能量远超人类执行相同移动所需的能量。在两足站立时,即使在静止状态下,机器人也必须不断消耗电能进行平衡控制[22]。
这个问题没有简单的解决方案。虽然改进的控制算法和更强大的传感器可以优化平衡策略,但它们无法克服双足设计的基本物理学。任何一个轻微的偏差——无论是由于传感器噪声、计算延迟还是意外扰动——都需要立即的姿态校正。轮式机器人缺乏这种持续的平衡维护需求;它们可以在没有电源的情况下保持稳定。
因此,在可预见的未来,人形机器人将继续比轮式或履带式系统消耗大幅更多能量。除非研发人员能够开发出具有被动稳定机制的根本性不同的双足架构(目前没有已知的可行方法),否则能量效率低下将是人形机器人的持久特征。这限制了它们作为无限续航系统的适用性,也意味着电池技术进步无法在该维度上完全弥补这一差距。
2、成本的经济学与规模化生产的极限
虽然单位成本随着生产规模扩大而下降遵循标准的经济学曲线,但人形机器人面临着轮式机器人或简单工业臂所不具有的固有成本驱动因素。多自由度、高精度致动、先进传感阵列和强大的板载计算——所有这些都增加了材料和工程成本。
即使实现了Tesla预期的大规模生产(预计2025年为5,000台Optimus机器人,基于供应准备情况潜在可扩展至12,000台),单位成本也预计不会低于15,000-20,000美元的某个下限[20]。相比之下,简单的轮式AMR(自主移动机器人)的成本通常为5,000-10,000美元,且成本结构已经经过多年的制造优化。这意味着人形机器人将长期保持显著的价格溢价,这将限制它们在对成本敏感的应用(如广泛的仓库物流)中的渗透。
规模化生产也面临技术挑战。不像汽车制造业那样有数十年的精炼工艺,人形机器人制造仍处于早期阶段。建立足够的零部件供应链、质量控制流程和维修网络需要时间和巨额投资。许多关键组件(如高性能致动器)目前仍处于半定制状态,无法以汽车零部件的规模和成本进行生产。预计这些制造业成熟度的改进将需要5-10年。
3、物理空间适应性的根本限制
人形机器人被设计用于在为人类设计的环境中工作,这一承诺在实践中面临着许多隐藏的复杂性。虽然采用人类形体因素可以进入人类基础设施,但它也带来了根本的设计权衡。例如,楼梯处理对人形机器人仍然是一个重大挑战,尽管Boston Dynamics的Atlas等少数超级工程系统能够处理它们。大多数部署的人形机器人不能有效地处理不均匀地形、潮湿或光滑表面、长期户外环境。
这些限制不仅仅是当前技术的缺陷,而是人形机器人形体因素与现代社会实际基础设施多样性之间的根本不匹配。人类虽然能够处理各种地形,但这需要多年的发展、复杂的神经系统以及在有限时间内(每次几分钟到几小时)的运动能力。机器人需要在可能持续8小时或更长时间的单次充电期间可靠地处理这种多样性,这是一个更高的要求。
虽然特定的改进(如改进的抓地力传感或更好的腿部几何)可以在某些特定环境中提高性能,但没有单一的硬件或算法解决方案能够使双足人形机器人与轮式平台在各种地形上一样可靠。在不可预见的未来,人形机器人将被限制在相对受控和可预测的环境中,这限制了它们的真正通用性。
4、安全与人机协作的监管与验证困境
确保人形机器人与人类安全协作的根本挑战在于,要求开发和验证的安全框架的复杂性与安全失败的潜在后果相匹配。与传统工业机器人不同,传统机器人失败可能导致产品线停机,而人形机器人失败可能导致人员伤害。
目前,没有国际公认的标准来定义人形机器人与人类共享空间的"足够安全"的条件。ISO 25785-1草案的最近发布是一个开始,但它必须经历多年的现场验证、修订和国际协调才能成为真正的规范[2]。在此期间,制造商必须进行自己的风险评估,这导致不一致的安全实践和监管的"等待观望"态度。
此外,即使安全标准确实得到完善,验证这些标准也需要大规模的真实场景测试。一个制造商不能通过三五次试验来证明其机器人在各种意外情况下都是安全的。人类工人面临的各种可能情景——从正常操作到生病时的非标准行为,从多机协调到与其他设备的干扰——都需要仔细验证。这个验证过程将需要数年和数百万美元的测试工作。
因此,真正安全的人机协作不是一个可以通过某个日期"实现"的技术目标,而是一个持续的进化过程,涉及不断学习、改进和监管调整。在这个过程中,人形机器人将可能被限制在相对有限的部署情景中,或受到严格的安全措施(如物理隔离、速度限制、人类监督)的约束。
人形机器人的应用与市场拓展
尽管存在技术限制,人形机器人在多个关键行业的实际应用已经开始显现真实的经济价值,为市场增长提供了具体的使用案例。
1、制造业与物流领域的商业部署
制造和物流已成为人形机器人商业化的领头羊。BMW正在其南卡罗来纳州Spartanburg工厂使用Figure AI的人形机器人进行厂内物流,例如在站点间移动部件[14]。Mercedes-Benz与Apptronik合作,在汽车生产线上部署Apollo人形机器人进行组件运输和组装线支持[14]。Tesla在其Fremont工厂内部使用自有Optimus Gen 2机器人,处理零部件配送至人类组装工作者的任务[14]。
这些早期部署通常专注于映射、受控环保环境中的移动强调任务,而不是精细操作。Amazon、GXO Logistics和Spanx等公司已部署Agility Robotics的Digit人形机器人[14]。值得注意的是,Spanx在乔治亚州仓库的部署标志着首次记录的商业人形机器人部署产生实际收入[14]。Digit处理重复的托盘移动、沿着映射路线搬运托盘和垃圾箱、管理高达35磅的负载,范围为六英尺[14]。
Sinopec和其他中国国有企业在炼油厂等危险工业环保环境中使用人形机器人进行检查和监视[17]。这些环保环境特别适合人形机器人,因为它们利用人形机器的能力访问人类基础设施,消除了将人类置于潜在危险情况中的必要性。试点已经证明了对远程和重复传感任务的强大早期价值[17]。
2、医疗保健与服务部门的新兴应用
医疗保健应用正在成为人形机器人的第二大应用领域。Diligent Robotics的Moxi处理常规医院物流——配送实验室样本、药物和用品——解放护士专注于病人护理[14]。在临床试验中,Moxi已减少护士行走时间达30%,同时还在进行远程医疗测试,允许远程医生通过机器人中介进行身体检查[14]。
SoftBank的Pepper机器人已在超过2,000个医疗机构部署,用于为痴呆症患者提供认知刺激和陪伴[14]。1X Technologies的NEO家用机器人预设计来协助老龄人口,执行日常任务并提供个性化的组织和记忆支持[24]。这些应用解决了全球人口老龄化和护理工作者短缺的实际问题。
3、空间探索的前沿应用
人形机器人在空间应用中的前景最为雄心勃勃。Engine AI与北京Inter Human Space Technology合作发起了"人形机器人宇航员探索计划",目标是将其PM01人形平台部署到轨道中,创建全球首个机器人宇航员[25]。Engine AI强调,太空探索的要求超过任何地球应用,要求卓越的稳定性、对各种环环保环的适应性和自主决策[25]。
将人形机器人部署于太空任务的关键优势包括它们能够利用为人类设计的工具和基础设施,减少特殊装备开发的需要[27]。在紧凑的空间(如未来的月球网关站)中,人类形式实际上优于许多备选方案[27]。一位德国航空航天中心的机器人专家估计,宇航员的劳动成本约为每小时120,000-140,000美元,使机器人协助在经济上极具吸引力[27]。
未来的太空任务预计将采用混合方法,结合人类、人形机器人和专门机器人系统[27]。人类带来适应性和判断力,而人形机器人可以连续运作并在无需生命风险的辐射或微重力环境中持续运作。这种协同可以重新定义任务设计,实现更长停留期和更大的建设项目,而不需指数式增加人员成本。
国际发展态势与监管框架的构建
全球范围内,人形机器人产业的发展呈现出多极化格局,各国政府和企业均在积极推进技术和监管创新。
1、中国的战略优势与标准系统建设
中国在人形机器人领域取得了令人瞩目的进展。在2025年这个被官方宣布为人形机器人大规模生产"元年"的一年中,超过140家国内制造商推出了330多种不同型号[13][16]。根据Morgan Stanley的数据,全球上市公司中致力于人形机器人的逾一半是中国企业[19]。
中国政府已认定人形机器人和具身AI为战略产业,并提供了慷慨的政策支持。2026年3月,中国发布了其首个涵盖人形机器人和具身AI完整产业链及生命周期的国家标准系统[13][16]。该标准系统由中国工业和信息化部技术委员会主持,由120多个研究机构、企业和行业用户协力开发[13]。
标准系统的六个关键组成部分包括:基本通用性、类脑及智能计算、四肢和部件、完整机器和系统、应用和安全伦理[13]。其中,类脑和智能计算标准涵盖了具身AI"大脑和小脑"的关键规范以及智能计算,规范了整个数据生命周期和模型训练部署流程[13]。应用标准管理了人形机器人在不同场景的开发、运作和维护,安全伦理标准贯穿整个产业生命周期,为技术演进提供合规保证[13]。
这一标准系统的发布预计将为快速扩张的产业提供至关重要的指导,通过标准化的技术要求和安全协议促进高质量发展[13]。
2、美国与西方的市场领导者角色
在西方世界,Tesla、Boston Dynamics、Figure AI、1X Technologies和Agility Robotics等公司正在推动创新的前沿。Tesla的Optimus项目虽然在公众关注中最为突出,但1X Technologies的NEO在2025年10月推出,标志着消费者级人形机器人首次进入市场,定价20,000美元,预计2026年交付[24]。
McKinsey的分析显示,当前的试点倾向于采用映射、受控环保环境中强调移动而非精细操作的结构化任务[17]。这与中国方法形成对比,中国企业更倾向于快速扩展生产规模,即使功能不够完整。美国和欧洲的方法更多地强调首先解决安全和可靠性问题,然后再扩展。
3、国际标准与监管协调的进展
全球范围内,安全和标准制定工作正在加快进行。IEEE的ISO 25785-1标准在2025年5月发布,是首个专门针对人形机器人安全的国际标准[2]。虽然这是重要的一步,但大量工作仍需进行,以建立覆盖人机协作、远程操作、数据隐私和伦理问题等各个方面的完整规范框架。
国际标准化组织、欧盟和其他监管机构正在开发框架,以确保不同地区生产的机器人能够安全互操作,并在共同的最低安全和性能标准下工作。然而,完全的国际协调预计需要3-5年才能实现,这意味着在此期间将存在监管碎片化和各国标准不一致的情况。
市场增长预测与行业前景
基于当前的技术进展和部署轨迹,多个研究机构和市场分析师已经建立了针对人形机器人市场的预测模型。
1、市场规模与增长率预测
全球人形机器人市场预期将经历异常迅速的增长。市场规模预计将从2025年的29.2亿美元增长至2030年的152.6亿美元,复合年增长率达39.2%[15]。某些更为乐观的预测表明,到2035年市场规模可能达到380亿美元[7]。
ABI Research提供了更为保守但仍然乐观的预测,预计人形机器人市场到2030年将达到65亿美元,复合年增长率为138%,这一增长率反映了市场从几乎不存在到大规模部署的转变[18]。该研究预测市场将在2026-2027年间迎来一个拐点,此时监管、安全和投资回报率问题将大多得到解决[18]。
装机容量预测同样乐观。Goldman Sachs预计到2027年将部署115,000台人形机器人,到2030年底年度装运量将达到195,000台[18]。2025年的部署已达到约16,000台,预计到2027年底将超过100,000台累计装机量[14]。
2、应用领域的细分预测
在应用领域方面,预期的增长并非均匀分布。制造和物流预计将在2026-2028年期间成为增长最快的部分,随着更复杂的捡取放置操作、多步骤组装和更广泛的服务部门采用的部署增加[14]。医疗保健应用预计将在同期内扩展,特别是在发达国家面临护理劳动力短缺的背景下。
娱乐和教育应用预计将在早期市场中占据显著份额,低成本人形机器人如Unitree的G1将在这些领域内泛滥[18]。个人协助和护理应用在2024年占据市场的31.6%,预计将通过2030年继续主导[20]。
空间探索应用虽然在总市场中仍然相对较小,但预期将以最高的增长率增长,因为多个国家和私人公司投资于月球基地和太空基础设施建设[27]。
3、技术与成本演化轨迹
预计在技术方面,三个关键方向的进展将推动市场增长。首先,基础世界模型的成熟将使通用目的人形机器人成为"世界模型基础模型的最大赢家",如NVIDIA Cosmos和Google Gemini等[18]。这些模型将允许机器人更有效地理解新环境和新任务。
其次,硬件改进将包括改进的电机、更精确的伺服执行器、改进的手指压力传感器、触觉反馈和增强的视觉系统[6]。这些改进将逐步将机器人从原型转变为真正的工作机器。
第三,成本的持续下降预计将由制造规模的扩大和供应链的成熟驱动。虽然当前的人形机器人单位成本范围从5,000美元(基本型)到超过1,000,000美元(复杂研究模型),但大规模生产预计将商业和工业应用成本压低至30,000-100,000美元范围[7]。
综合分析与未来展望
图
人形机器人产业正处于一个独特的历史时刻。技术能力与市场需求之间的融合正在创造商业化的机会,同时物理约束与成本现实则施加了实际的限制。
1、短期前景(2026-2028年)
能够处理更复杂的多步骤任务;成本的持续
然而,这个时期也将受到持续的限制条件的约束:电池续航时间和能源效率将仍然是限制因素,大多数部署将需要规划的电源恢复或电池交换;安全和监管框架将继续发展,创造部署不确定性和需要大量的合规投资;人机协作将仍然受到严格的空间和操作限制,大多数机器人将与人类工作者物理隔离;技能泛化将仍然有限,每个新应用场景或任务变化将需要显著的重新训练或定制。
2、中期前景(2028-2035年)
在中期内,人形机器人应该逐渐成为多个行业的常见景观。这个时期可能见证:人形机器人在制造业中的广泛采用,可能占据多达5-10%的劳动力空缺;医疗保健部门的机器人护理助手和陪伴机器人的规范化;服务业中人机混合团队的出现,特别是在零售、餐饮和酒店业;空间探索的显著增加,包括月球基地建设和轨道维护任务中的机器人操作;消费者级家用机器人的逐渐但稳步的渗透,尽管仍然被限制在中高收入人口统计学中。
然而,即使在这个更成熟的阶段,基本的限制也预计将保持:能源效率和电池续航时间可能会改进但不会根本改变,双足形态的能量消耗预计仍将比轮式系统高30-50%;成本虽然下降但仍将高于轮式或定制工业自动化解决方案,限制了完全广泛采用;人形机器人仍将被限制在相对结构化和受控的环保环境中,或在不可预测环境中需要显著的人类监督;多机协作将改进但仍然复杂,单个人类监督者可靠地监督的机器人数量预计将有限制。
3、长期视景(2035年及以后)
在更远的未来,人形机器人将可能成为经济和社会结构中的内在部分,但形式和范围预计将由早期发展期间形成的基本设计选择所决定。如果当前采用双足、多自由度、通用目的的方法持续,我们应该预期一个由能量成本约束、规模化制造挑战和有限的真正自主性所定义的世界。
另一个可能是人形机器人在选定的高价值应用中仍然相对利基——医疗保健、空间探索、危险环境检查——而轮式、专门的和不同配置的机器人在大多数其他领域占主导地位。这不是失败,而是对每种技术在其专业应用中最擅长的理性认识。
结论与建议
人形机器人产业正在经历真实的技术进步和商业部署,这将在未来十年内重新定义多个关键产业部门。然而,技术能力与完全解决所有约束条件的期望之间存在显著差距。一些约束条件—如电池续航时间、安全标准和灵巧操作能力—预计在2-3年内将取得重大改进,为更广泛的部署开辟道路。
其他约束条件根深蒂固于物理学和设计权衡中。双足形态的能量效率低下不会因为更好的电池或软件而根本改变,除非研发人员发明出完全不同的稳定机制。成本将继续随着制造规模扩大而下降,但不会达到使人形机器人与轮式系统在成本竞争力上持平的水平。真正的自主性和适应性预计将继续落后于演示中所显示的能力。
对利益相关者的建议如下:对于制造商,专注于选定的高价值应用领域(特别是医疗保健、空间和危险环保环的检查)而不试图成为所有工作的通用解决方案是更理性的策略。对于企业用户,应在已证明的投资回报率基础上谨慎推进试点,同时认识到需要规划显著的集成工作和持续的操作员培训。对于政策制定者,安全和监管标准的发展应平衡创新鼓励与适当的公众保护。对于投资者,虽然人形机器人代表一个重要的增长领域,但具体的应用和市场段的潜力差异巨大,应谨慎选择投资标的。
人形机器人不会是机器人的"终局"形式,但它们肯定会在多个关键领域内占据重要且日益增长的角色。理解它们的真实能力与真实限制,以及哪些约束可以解决而哪些是基本性的,对于在这一变革性技术上做出明智决策至关重要。
References:
[1] Figure 03 Reveals 2026 Humanoid Robot Endgame (AI NEWS)https://www.youtube.com/watch?v=inG-6mJOXFg
[2] Top 5 Technical Challenges in Humanoid Robotics | Simplexityhttps://www.simplexitypd.com/blog/top-5-technical-challenges-in-humanoid-robotics/
[3] Top 5 Global Robotics Trends 2026https://ifr.org/ifr-press-releases/news/top-5-global-robotics-trends-2026
[4] The State Of Humanoid Robots, 2026 - Forresterhttps://www.forrester.com/report/the-state-of-humanoid-robots-2026/RES191956
[5] Humanoid Robots: Abilities, Challenges, and the Road Aheadhttps://www.whalesbot.ai/blog/humanoid-robots-abilities-challenges-and-the-road-ahead
[6] All New Humanoid Robots That Will Take Humanity to the Next Levelhttps://www.youtube.com/watch?v=HEWYgeXk26s
[7] Humanoid Robot Cost in 2026: Prices & Modelshttps://us.keyirobot.com/blogs/buying-guide/how-much-does-a-humanoid-robot-cost-2025-price-breakdown-models-for-sale
[8] Multimodal perception-driven decision-making for human-robot ...https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2025.1604472/full
[9] Tackling Automation's Biggest Challenges: Dexterous Manipulationhttps://www.automate.org/robotics/industry-insights/biggest-automation-challenges-dexterous-manipulation
[10] How much do robots cost? 2026 price breakdown - Standard Botshttps://standardbots.com/blog/how-much-do-robots-cost
[11] How eyes affect our perception of a humanoid robot's mindhttps://techxplore.com/news/2026-02-eyes-affect-perception-humanoid-robot.html
[12] The Developments and Challenges towards Dexterous ... - arXiv.orghttps://arxiv.org/html/2507.11840v1
[13] China releases national standard system for humanoid robotics and ...http://english.scio.gov.cn/chinavoices/2026-03/02/content_118354738.html
[14] Humanoid Robot Applications Guide 2026 | Robozaps - Bloghttps://blog.robozaps.com/b/applications-of-humanoid-robots
[15] Humanoid Robot Industry worth $15.26 billion in 2030https://www.marketsandmarkets.com/PressReleases/humanoid-robot.asp
[16] China Releases National Standards for Humanoid Robotics and ...https://theaiinsider.tech/2026/03/01/china-releases-national-standards-for-humanoid-robotics-and-embodied-ai/
[17] Humanoid robots: From concept to reality - McKinseyhttps://www.mckinsey.com/industries/industrials/our-insights/humanoid-robots-crossing-the-chasm-from-concept-to-commercial-reality
[18] Humanoid Robot Market Size, 2024 to 2030 - ABI Researchhttps://www.abiresearch.com/news-resources/chart-data/humanoid-robot-market-size-outlook
[19] China's Humanoid Robot Can Change It's Batteries - YouTubehttps://www.youtube.com/watch?v=6NPZtI6S8SI
[20] AI Humanoid Robots 2026: Technology, Builders & Futurehttps://www.articsledge.com/post/ai-humanoid-robots
[21] The value and limitations of humanoid robots in the warehouse of ...https://www.scmr.com/article/the-value-and-limitations-of-humanoid-robots-in-the-warehouse-of-the-future
[22] Today's Humanoid Robots Look Remarkable—but There's a Design ...https://singularityhub.com/2025/08/15/todays-humanoid-robots-look-remarkable-but-theres-a-design-flaw-holding-them-back/
[23] These New AI Robots Are About to Become Real in 2026 - YouTubehttps://www.youtube.com/watch?v=t-GeDuS3qWw
[24] NEO Home Robot | Order Todayhttps://www.1x.tech/discover/neo-home-robot
[25] China: World's first robot astronaut for space exploration programhttps://interestingengineering.com/ai-robotics/worlds-first-humanoid-robot-astronaut-china
[26] I Tried the First Humanoid Home Robot. It Got Weird. | WSJ - YouTubehttps://www.youtube.com/watch?v=f3c4mQty_so&vl=en
[27] Humanoid Robots Edge Closer to Space Missions Amid ...https://www.techjournal.uk/p/humanoid-robots-edge-closer-to-space
[28] How Robots Learn to Be Robots: Training, Simulation, and Real ...https://www.youtube.com/watch?v=S4tvirlG8sQ
[29] New flexible soft robots transform health care, fabrication and ...https://www.nsf.gov/science-matters/robotics-gymnastics-new-flexible-soft-robots-transform
[30] A beginner's guide to safe human-robot collaborationhttps://www.therobotreport.com/a-beginners-guide-to-safe-human-robot-collaboration/
[31] Unlocking Motion Data for Humanoid Robotics with Rokokohttps://www.rokoko.com/insights/unlocking-the-data-infrastructure-for-humanoid-robotics
[32] Soft Robotics - Harvard Biodesign Labhttps://biodesign.seas.harvard.edu/soft-robotics
[33] A literature review on safety perception and trust during human ...https://pmc.ncbi.nlm.nih.gov/articles/PMC11076167/