《2026具身智能数据行业研究白皮书》聚焦具身智能数据领域,梳理了行业发展背景、数据采集路线,借鉴自动驾驶发展经验,评估数据发展价值并推演商业化路径,展现了这一前沿领域的技术特征与发展逻辑。
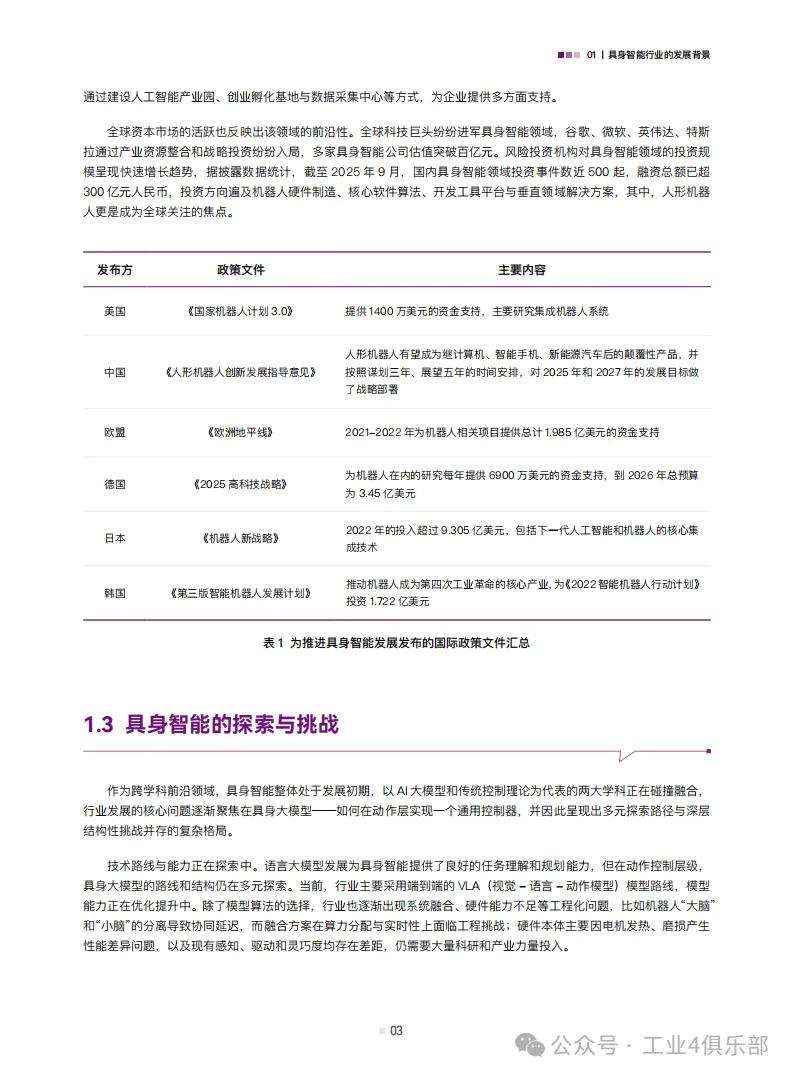
具身智能作为人工智能与机器人技术的交叉领域,核心是让机器通过物理实体与环境的感知-行动循环产生智能,是实现通用人工智能的重要路径,已成为全球科技竞争焦点,多国出台政策支持,资本市场也高度关注,但其发展仍面临技术路线探索、数据瓶颈、成本与商业化等问题,其中数据匮乏是核心制约,现有真实世界物理互动数据量远未满足需求。
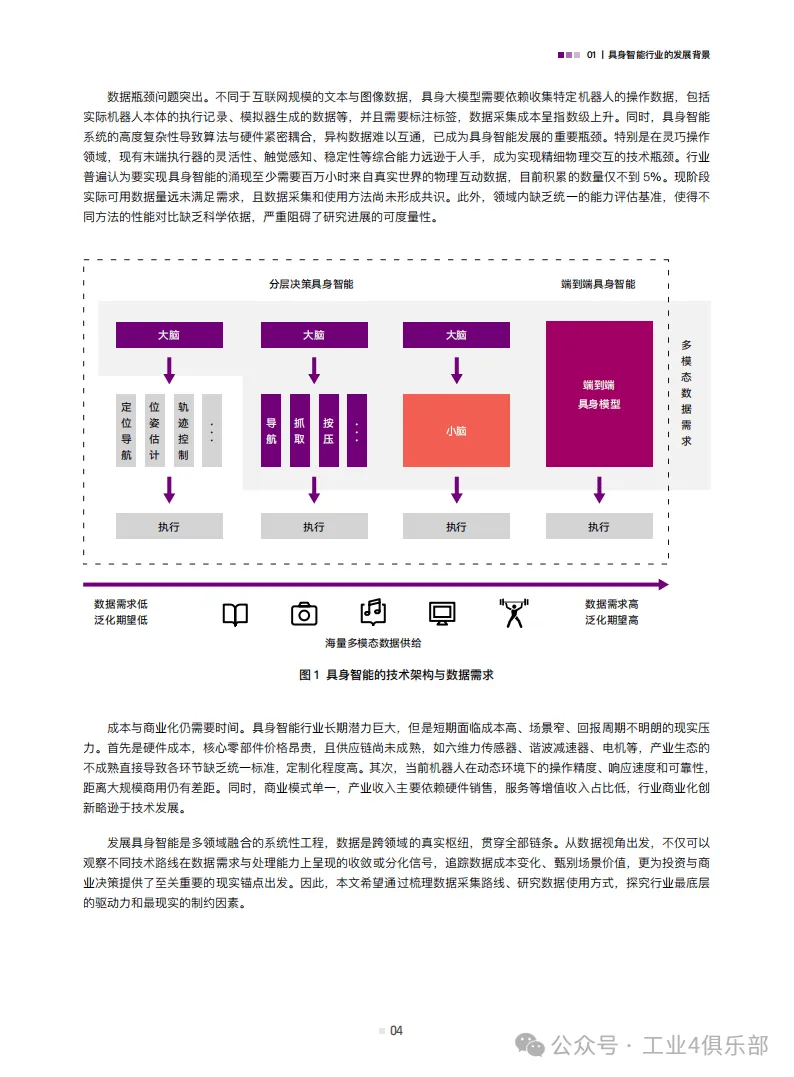
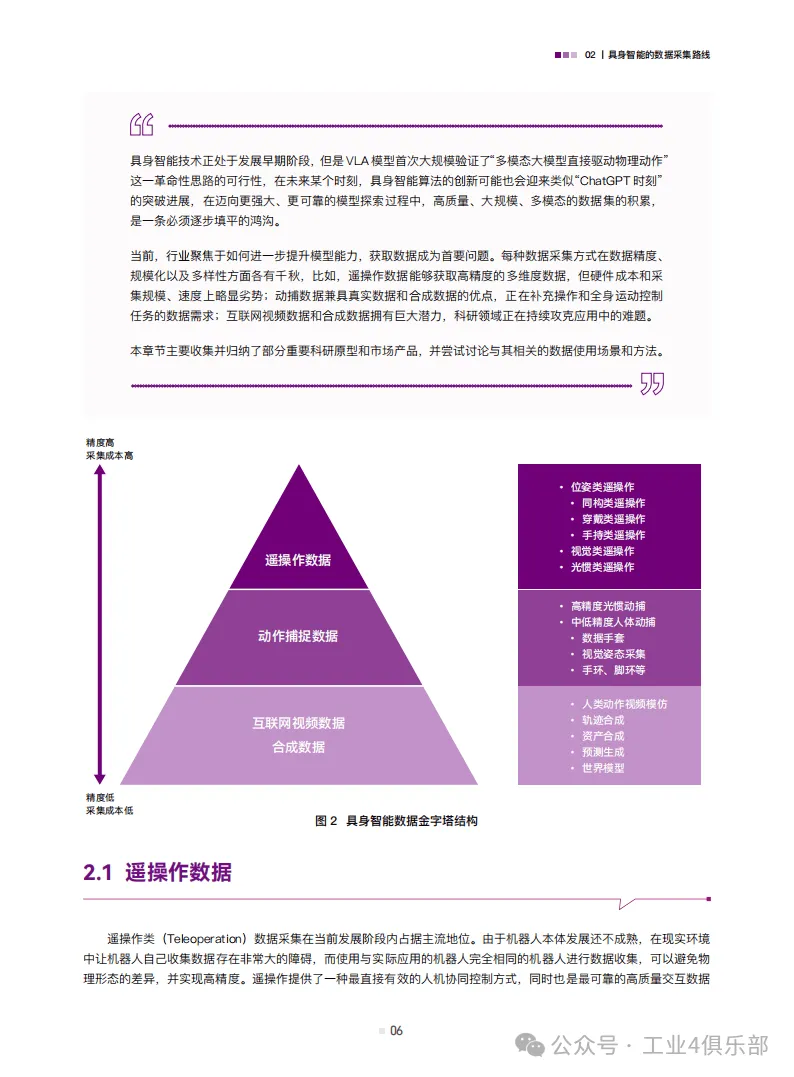
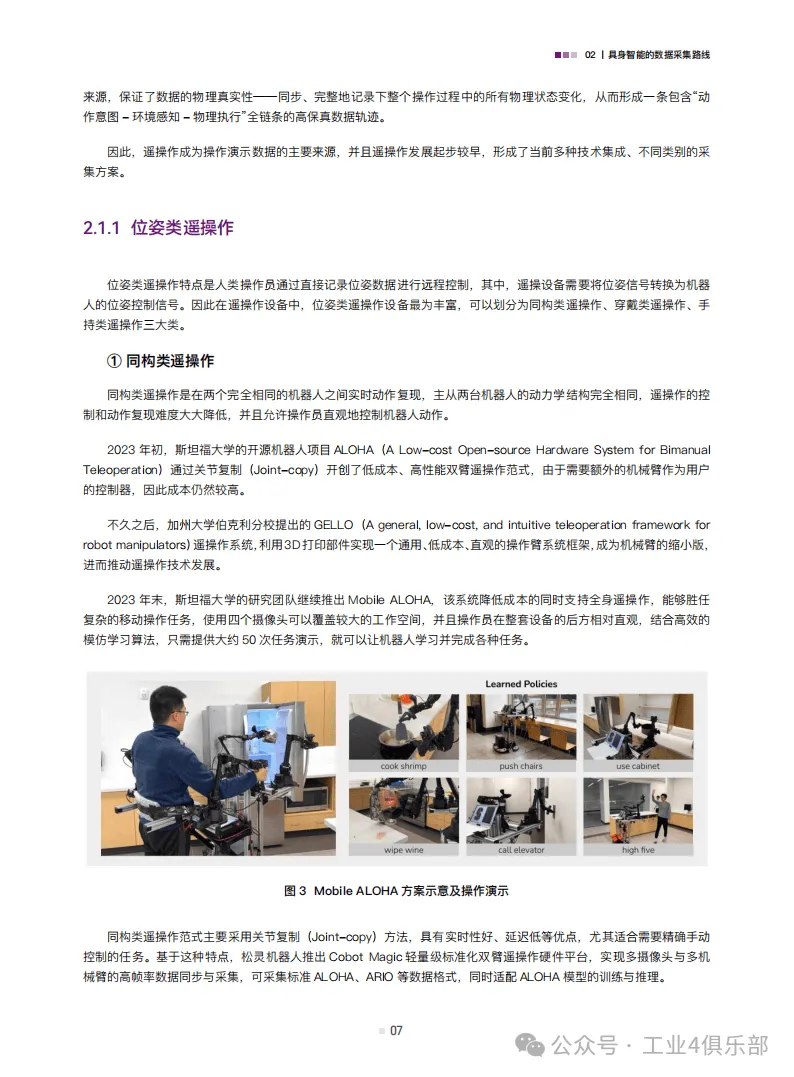
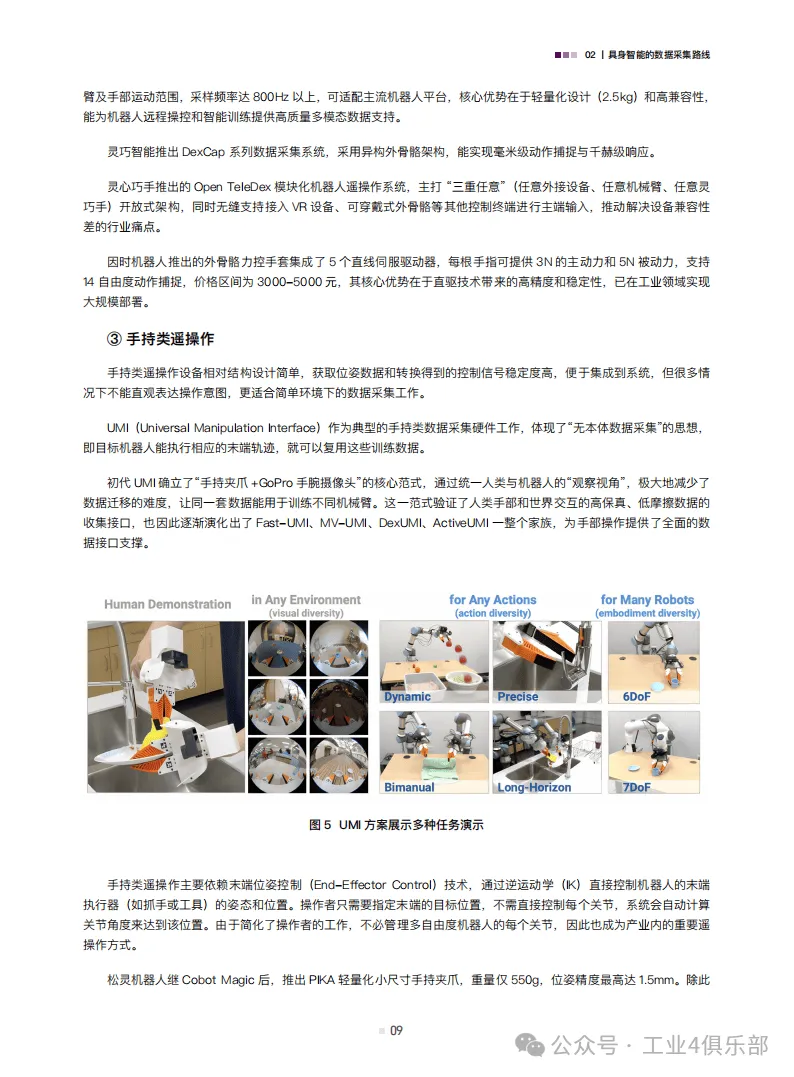
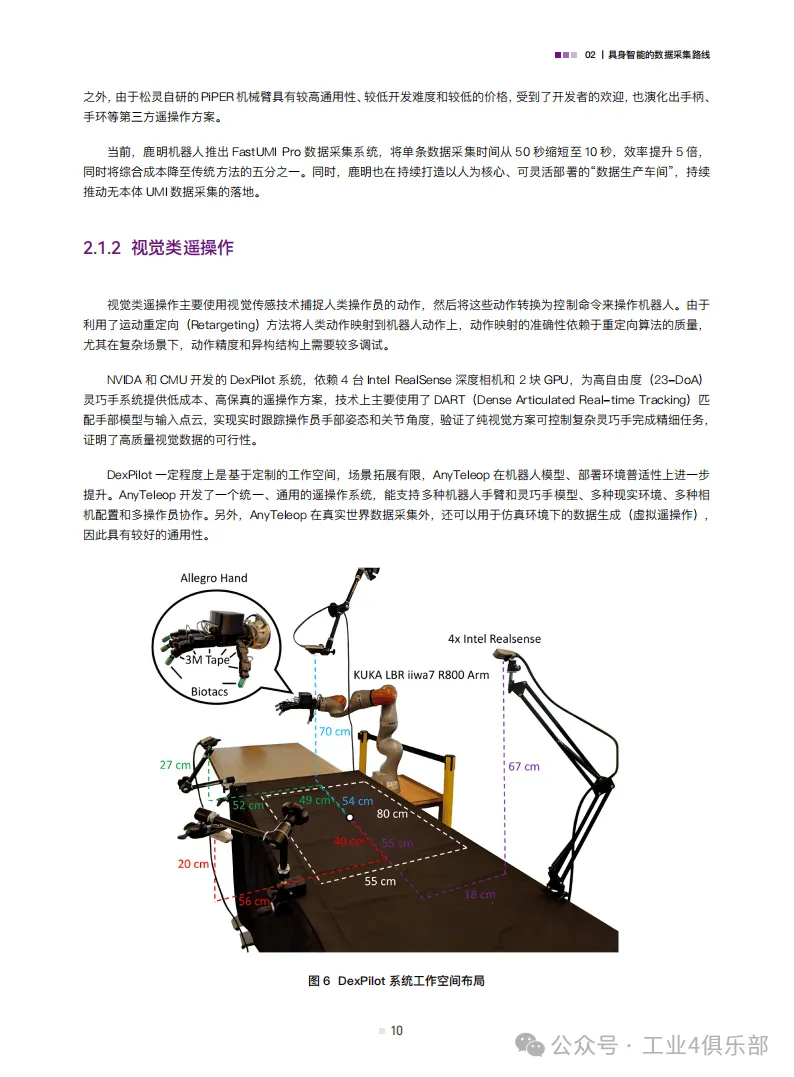
白皮书归纳了遥操作、动作捕捉、互联网视频与合成数据三类核心数据采集路线,各有优劣且呈现融合趋势。遥操作数据精度高,是当前主流,分为位姿、视觉、光惯类等;动作捕捉数据是连接真实与虚拟的桥梁,能补充操作和运动控制数据需求;互联网视频数据规模大但精度低,合成数据则通过仿真与算法生成,可弥补真实数据不足,二者均是未来重要的数据来源。
自动驾驶的发展为具身智能提供了关键经验,其从依赖静态真机数据到仿真与真机结合的转变,印证了静态数据的局限,也指明了具身智能需构建动态闭环数据采集系统、推动数据异构融合、遵循“仿真优先,真机验证”的范式。
对具身智能数据发展的评估显示,真机遥操作数据是发展初期的黄金标准,但存在泛化和成本局限;无本体数据采集能破解数据成本-规模-多样性难题,有望推动模型性能提升;仿真系统是必要工具,但面临保真度与复杂性的矛盾,仍需技术创新。
具身智能的商业化是与数据深度绑定的渐进过程,需先通过少量数据构建产品原型,再聚焦垂直场景以大量数据推动算法迭代与标准化,最终依靠海量数据实现高阶功能闭环拓展,未来或诞生“智能即服务”的商业模式,硬件标准化后将催生全新产业生态。整体而言,具身智能是人工智能从认知智能向物理世界行动智能的跨越,其发展是一场长期的渐进式演进,数据的高效获取、处理与利用是产业发展的核心支撑。


▼
▐ 行业报告
▐ 政策新规

粤数规院致力于为政企提供专业的数字经济、数字化转型解决方案,开展课题研究、战略规划、产业运营、人才培养和专业资讯服务
|