国先中心《2026 年具身智能数据行业研究白皮书》核心结论:具身智能已成为全球科技竞争焦点,数据是其从技术探索走向产业落地的核心驱动力与关键瓶颈。当前行业形成遥操作数据、动作捕捉数据、合成 / 互联网视频数据三大采集路径,“无本体数据采集” 与 “仿真 + 真机验证” 成主流探索方向,商业化需遵循 “少量数据建原型 — 场景数据促迭代 — 海量数据拓功能” 的渐进路径,数据治理、感知创新与垂直场景突破是核心机会。
一、三大核心数据采集路径:各有优劣,融合成势
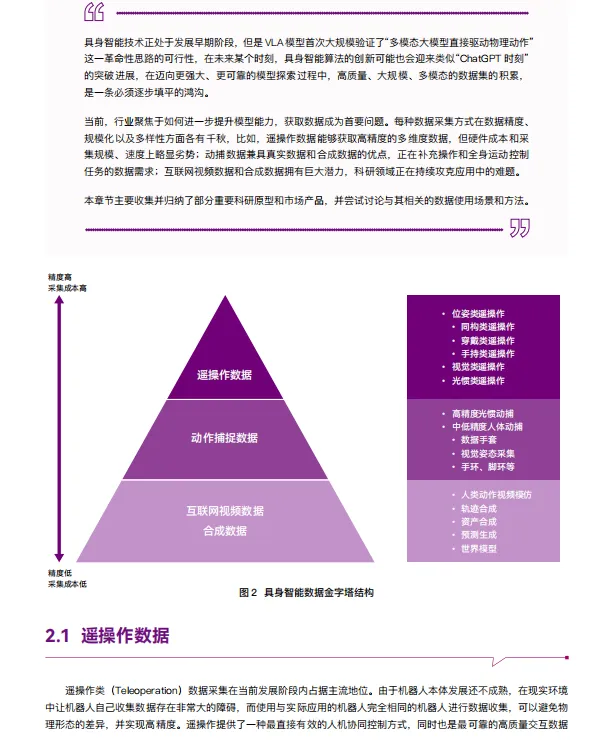
(一)遥操作数据:高保真 “黄金标准”
核心优势:同步记录多维度物理状态,数据因果明确,是模型训练的基础标杆,适配高精度操作场景。 主流类型:位姿类(同构、穿戴、手持遥操)、视觉类(单目 RGB、多相机跟踪)、光惯类(VR + 动捕设备)。 代表方案:Mobile ALOHA(低成本全身遥操)、AirExo-2(摆脱真机数据依赖)、UMI(无本体数据采集范式)。 局限:硬件成本高、采集规模有限,泛化能力受场景约束。
(二)动作捕捉数据:真实与虚拟的桥梁
核心定位:连接物理世界与数字仿真,兼具真实数据可靠性与合成数据灵活性。 采集方式:相机视频、VR 设备、专业动捕系统(成本与精度递增,规模递减)。 代表方案:DexCap(便携式手部动捕)、诺亦腾 PN Studio(高精度全身 + 手指捕捉)、帕西尼 PMEC(多维力采集)。 价值:补充操作与全身运动控制数据,适配灵巧手、人形机器人等复杂本体。
(三)合成 / 互联网视频数据:规模化降本关键
互联网视频数据:依托海量人类动作视频,通过算法提取动作信息,成本极低但精度不足,需配合真机数据微调(代表:字节 GR-2、枢途 HORA 数据集)。 合成数据:含轨迹合成(生成操作策略数据)、资产合成(3D 场景 / 物体创建)、决策生成(任务分解与代码生成),解决数据稀缺问题,但存在 Sim2Real 迁移鸿沟。 代表方案:NVIDIA MimicGen(少量演示生成海量数据)、RoboTwin(数字孪生合成数据集)。
二、自动驾驶数据经验:具身智能可复用三大启示
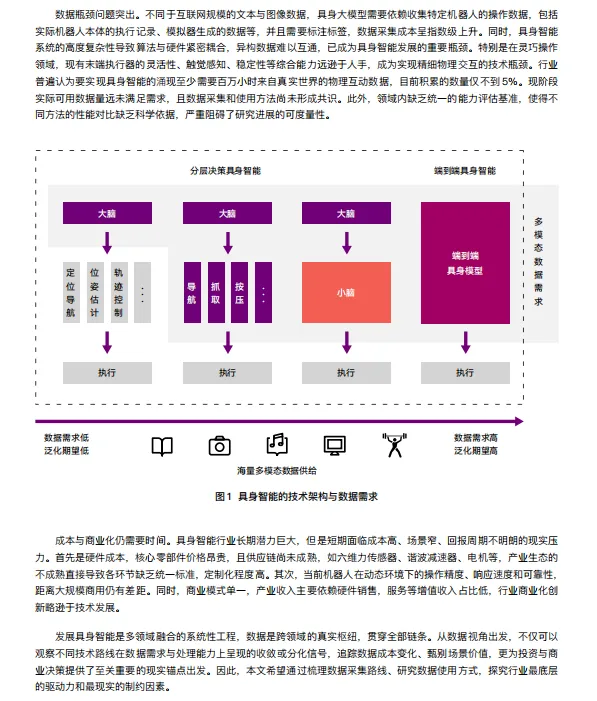
警惕静态数据依赖:高精地图的教训表明,仅靠预采固定数据难以应对动态场景,需构建 “影子模式” 动态数据闭环。 数据异构融合:分层采集多模态数据,通过 BEV 等范式实现特征级融合,提升模型对复杂环境的理解能力。 仿真优先,真机验证:以仿真系统生成海量数据预训练模型,再用少量真机数据校准,平衡成本与泛化能力。
三、渐进式商业化:数据驱动的三阶段路径
(一)阶段 1:少量数据构建原型(启动期)
核心目标:验证技术工程可行性,聚焦结构化子任务(如 3C 电子装配、简单抓取)。 数据策略:依赖数十至数百条专家遥操作数据,快速打造最小可行产品。 关键挑战:控制硬件成本,提升任务稳定性,证明 ROI(目标 1.5-2 年回本)。
(二)阶段 2:场景数据驱动迭代(成长期)
核心目标:建立垂直行业壁垒,推动算法标准化。 数据策略:深耕特定场景(工业精密装配、仓储物流等),规模化采集场景数据,解决数据孤岛问题。 行业动作:国内 20 余家具身智能训练场落地,总面积超 4 万平方米,推动公共数据共享。
(三)阶段 3:海量数据拓展高阶功能(成熟期)
核心目标:实现跨场景通用智能,探索 “智能即服务” 模式。 数据策略:构建 “云 - 边 - 端” 协同闭环,云端持续训练技能库,机器人本体按需加载技能包。 商业展望:硬件标准化,利润转向技能订阅,催生全新开发者生态。
四、核心机会与风险提示
(一)四大发展机会
感知技术创新:智能传感模块(触觉、力觉等)成为数据入口关键。 数据治理与标准化:全生命周期数据管理平台 + 权威基准数据集,降低行业创新成本。 垂直场景解决方案:聚焦封闭 / 高危 / 高人力成本场景,实现可量化价值。 真机失败数据与世界模型:负面样本加速模型进化,世界模型成通用智能潜在路径。
(二)主要风险
技术路径不确定性:模块化与端到端架构之争未决,可能出现颠覆性新范式。 数据安全与伦理:多模态数据易含隐私信息,物理世界应用存在安全风险。 商业化周期长:当前订单以试点为主,规模化落地需十年以上生态培育。
具身智能正从技术概念走向产业实践,数据能力决定企业核心竞争力。