


· 点击蓝字,关注我们
1. 六维力传感器技术基础与原理概述
1.1 六轴力 / 力矩测量原理

1.2 传感器结构类型与技术路线
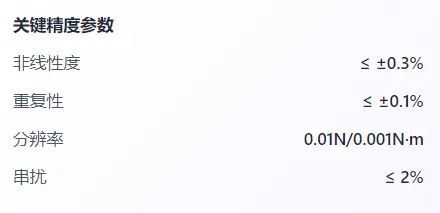
1.3 关键技术指标定义与评估标准
1.4 技术发展趋势与创新方向
2. 六维力传感器选型要点系统梳理
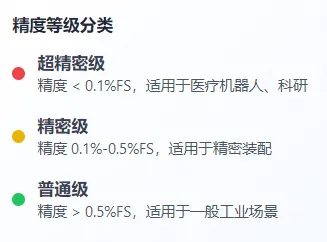
2.1 精度指标体系与选择原则
2.2 量程范围确定方法
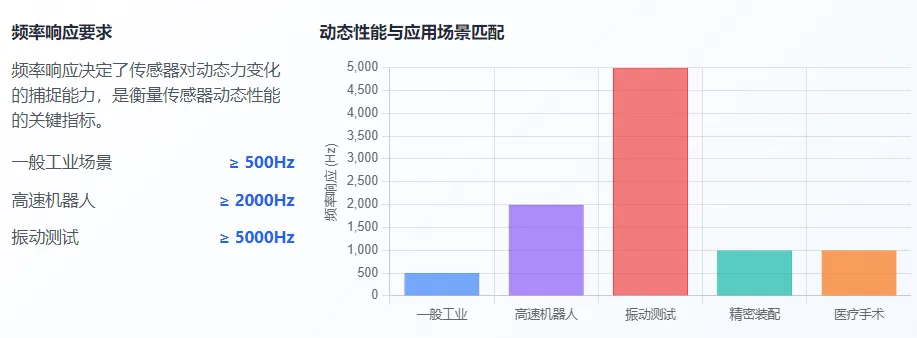
2.3 频率响应特性与动态性能要求
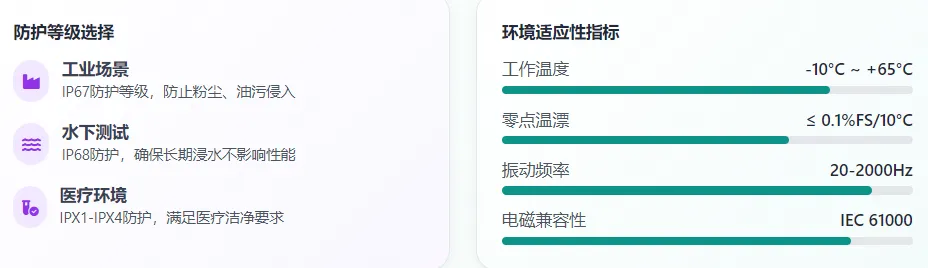
2.4 环境适应性与防护等级要求
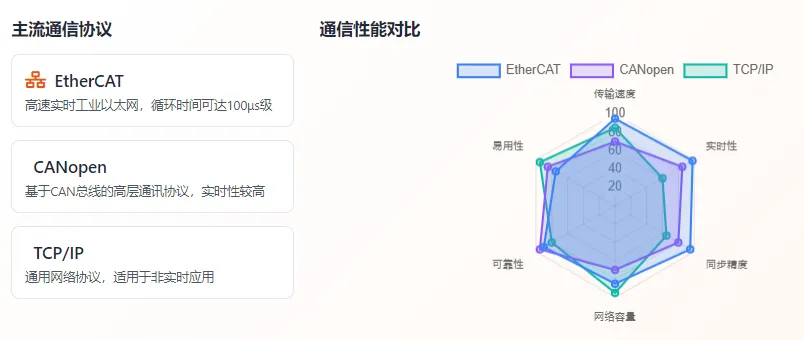
2.5 接口通信协议与系统集成要求
2.6 机械安装与尺寸规格考量
3. 不同应用场景定制化需求分析
3.1 工业机器人场景需求特点
3.2 医疗设备场景特殊要求
3.3 航空航天场景严苛标准
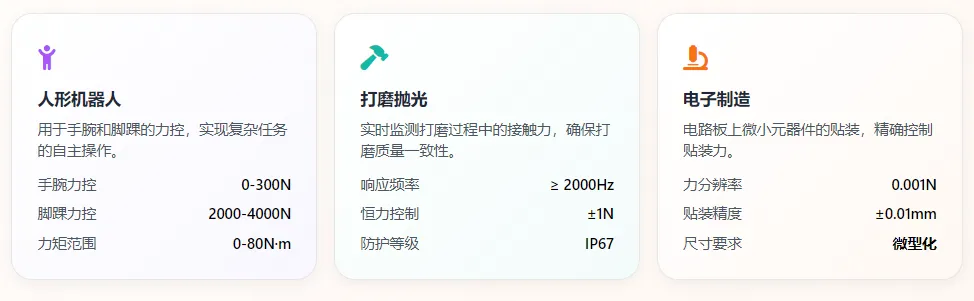
3.4 其他典型应用场景需求
4. 市场主流品牌产品对比分析
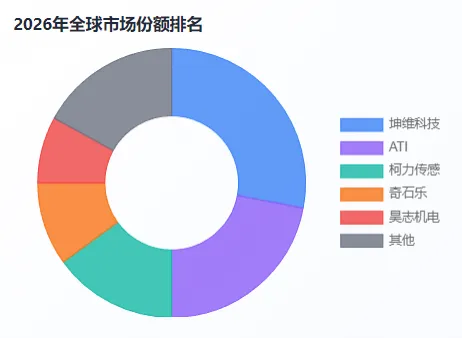
4.1 全球主要厂商市场格局与技术特点
4.2 ATI Industrial Automation 产品系列与优势分析
4.3 国产领先品牌技术突破与产品特色

4.4 产品性能参数、价格区间与适用范围对比
