


当前人形机器人关节模组精密减速器可分为谐波减速器,RV减速器,行星减速器和摆线针轮减速器。1)谐波:传动比高、精密度高但因柔轮不断形变对材料疲劳寿命、加工设备要求高,可应用于机器人小臂、腕部以及手部;2)行星:成本低制造难度小,但精度不高,目前主要应用于机器人手部;3)RV:高负载高刚度大体积,可应用于机器人机座、大臂、肩部等重负载;4)摆线针轮:高精度高负载,且噪音低体积小,可应用于机器人腰髋部、腿部等。我们对不同减速器方案进行范围内初步对比排序,得到传动精度:谐波/摆线针轮>RV>行星;体积:RV>谐波>行星/摆线针轮;价格:RV>摆线针轮>谐波>行星。
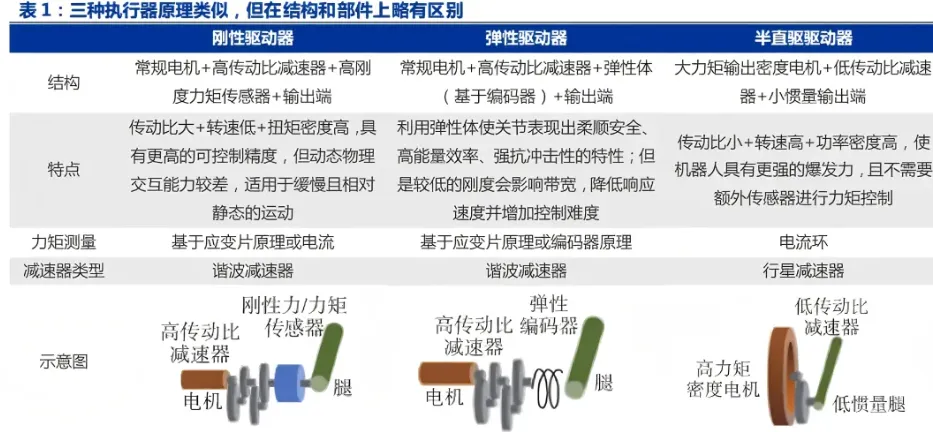
在众多技术环节中,旋转关节作为其核心部件之一,不仅关乎到机器人的运动性能,还直接影响到机器人的制造成本与商业化进程。相关调研机构预测,得益于人形机器人产业爆发式增长。未来几年内,人形机器人旋转关节将保持两位数的高速增长。旋转关节的技术路线主要包含刚性驱动器、弹性驱动器以及准直驱驱动器(QDD)这三种类型。
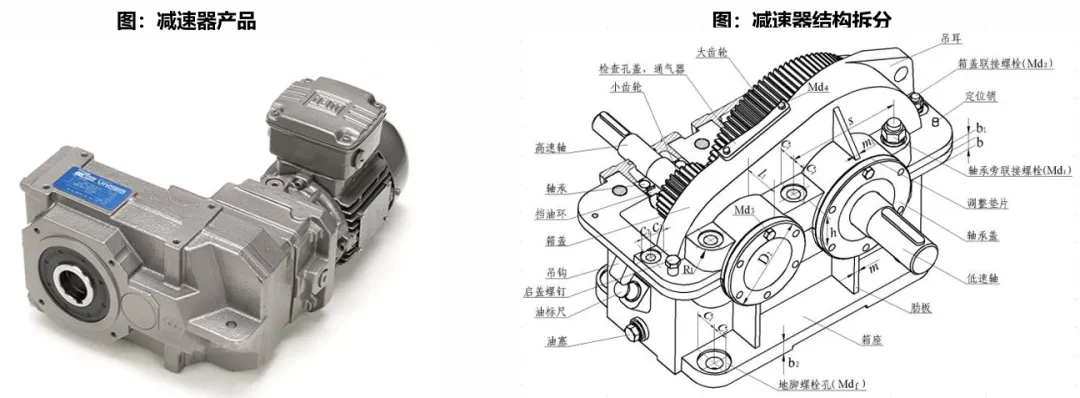
减速器又称减速机,与伺服电机、控制器并称为机器人三大核心零部件,在机器人动力系统中 是连接动力源和执行结构的中间结构。与机械设备一样,机器人一般由动力、传动与执行三大系统构成,人形机器人作为精密制造、先进传感与控制技术的高度集成化产物,其传动系统成 为机器人精密控制的关键,而减速器则是传动系统的关键部件。
减速器是由多个齿轮组成的常用传动零部件,内部结构复杂,其通过不同大小齿轮的啮合传递 动力。在一般的机械设备中,由电机带动设备运转,但电机额定转速不能得到完全使用,需要通过减速器降低转速增加扭矩;因此我们可以类比在人形机器人中,减速器主要将伺服电机的力传导至各执行结构如关节处,降低转速并增加扭矩,以精确控制机器人动作。
▪ 减速器用于实现降速增矩
减速器可平衡电机“高转速低扭矩”与关节“低转速高扭矩” 的矛盾。通过减速器可以将电机 的低扭矩放大为高扭矩以满足负载驱动需求。这是因为在人形机器人中,伺服电机为追求小型 化和快速响应,通常输出高转速低扭矩,而机器人执行末端如机械臂关节、夹持器等负载需要 低转速高扭矩来驱动手臂运动或抓取重物。
可保证运动控制的高精度与稳定性,在要求高精度的场景中不可或缺。人形机器人的运动精度 直接影响任务完成质量,例如抓取细小物体、行走时的步幅控制和平衡调整等,均依赖传动系 统的精度。而电机输出转速存在微小波动,直接传递到末端会放大运动误差,因此需要减速器 通过多级啮合与齿轮设计来平滑电机的转速波动,使末端运动更稳定,控制误差。

▪ 减速器分类
精密减速器主要分为谐波减速器、RV减速器,行星减速器和摆线针轮减速器。

▪ 谐波:基于柔轮与刚轮的齿数差减速
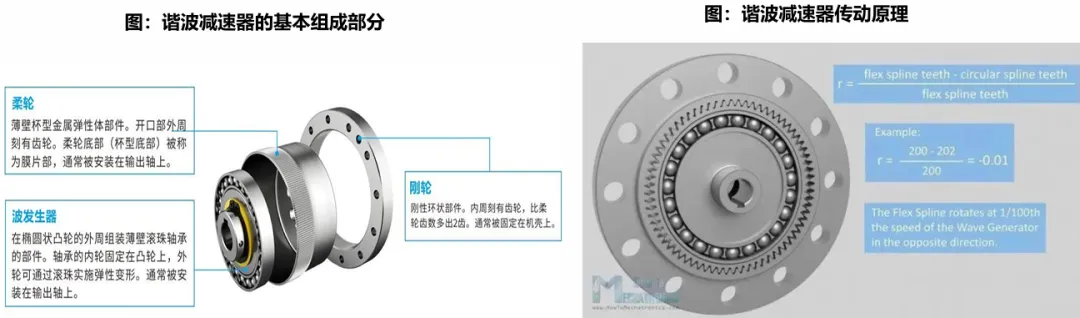
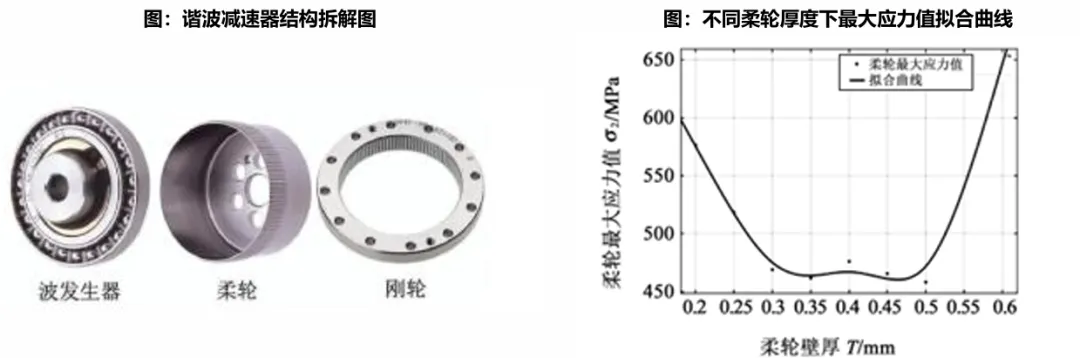
谐波减速器由波发生器、柔性齿轮、刚性齿轮三个基本构件组成。波发生器通常用作输入,通 常连接到伺服电机。柔轮是由合金钢制成的薄圆柱形杯,杯的开口端有外齿,用作输出并连接 到输出法兰。圆形刚轮是带有内齿的刚性环。当齿轮组装好时,它与波发生器椭圆长轴上的柔 性齿轮的齿相啮合。
谐波减速器传动的原理在于柔性齿轮与刚性齿轮的齿数差。减速比=柔轮齿数 /(柔轮齿数–钢 轮齿数)。当波形发生器发生旋转时,柔轮和钢轮会啮合在一起并随着旋转慢慢改变位置,如 果减速比为100,那么波形发生器需旋转100圈,柔轮才能前进一圈,如果柔轮有200个齿,那么钢轮将有202个齿。通过改变齿数,我们可以得到不同的减速比,单级谐波减速器的减速比 一般处于70~320范围内,在某些装置中甚至可以达到1000。
谐波减速器的技术难点主要在于齿形设计、材料、加工设备。1)齿形设计:由于谐波减速器 的传动原理为两个齿轮之间的啮合运动,且柔轮不断发生形变,因此齿轮的高度、宽度、形状 等设计对减速性能有较大影响。2)材料:柔轮不断形变传递力矩,对材料的一致性、载荷、 精度、疲劳寿命都有很高要求,普通的金属和合金难以达到要求,常用40CR合金钢等材料。 3)加工设备:柔轮很薄、厚度约0.2~0.6mm,加工和切割要求高,高精度数控磨床、滚齿机 均需要进口,而日本高精度机床对我国有一定限制。
谐波减速器具有高精度大扭矩、结构紧凑和无背隙运动、质量轻、体积小,适合中低负载的特 点。常用于精密仪器、航天器、机器人等高精度应用领域。谐波减速器应用领域目前以各种机 器人为主,除此之外,还有数控机床,半导体、光伏、医疗等其他设备领域。
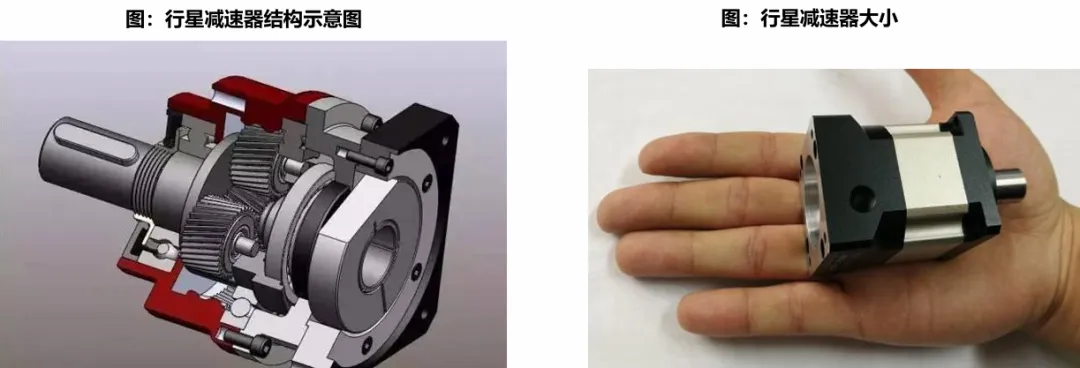
▪ 行星:由太阳轮带动行星轮进行减速
行星减速器由三到四个行星轮和一个太阳轮组成。其中心齿轮通常被称为“太阳轮”,由输入 端伺服电机通过输入轴驱动旋转。行星减速机内部结构图有多个围绕太阳轮旋转的齿轮被称为 “行星轮”,其一侧与太阳轮咬合,另一侧与减速机壳体内壁上的环形内齿圈咬合,承载着由 输入轴通过太阳轮传递过来的转矩动力,并通过输出轴将动力传输到负载端。
行星减速器如何实现减速?在行星减速机运转时,随着太阳轮的自转,行星轮将围绕太阳轮公 转。行星减速器通过传动轴上的齿数少的齿轮啮合输出轴上的大齿轮,以达到减速的目的。其 减速比由环形内齿圈与太阳轮的尺寸(周长或齿数)之比决定。具有单级减速齿轮组的速比通 常在3~10之间;速比超过10以上的行星减速机,需要使用两级(或上)的行星齿轮组减速。

精密行星减速器难点主要体现在制造、维护和工艺定制化。1)制造:精密行星减速器产品结 构复杂,制造安装难度较大;2)维护:定期维护和保养(包括定期更换润滑油和维修传动部 件等);3)工艺:人形机器人精度、效率等的额外要求会相应增加制造成本,如人形机器人若 使用行星减速器则需要对电机进行扁平化设计,同时行星减速器也需要定制成微型多级传动的形式。
行星减速器成本较低,制造难度相对低。行星减速器体积小、重量轻,承载能力高,使用寿命 长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。适用于起重运输、工程机械、 冶金、矿山、石油化工、建筑机械、轻工纺织。
▪ RV:正齿轮减速与差动齿轮减速组成
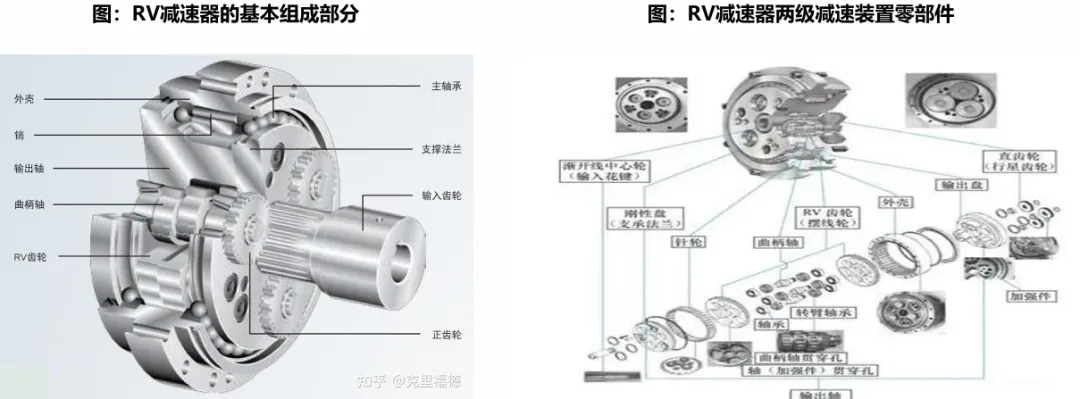
RV减速器,由正齿轮(行星轮)、RV齿轮(摆线轮)、曲柄轴、销(针齿销)、外壳(针轮 )、输出轴等组成。是在传统针摆行星传动的基础上发展而来,其中,内齿轮和外齿轮的啮合 是实现减速的关键。内齿轮是一个圆柱形的齿轮,外齿轮则是一个圆锥形的齿轮。内齿轮和外 齿轮的齿数不同,因此在啮合时会产生减速的效果。
RV减速器如何减速?RV减速器传动系统由两级减速机构组成。第一级正齿轮减速机构(行星 减速):中心轮(太阳)与输入轴相连,其旋转将带动周围的行星轮绕中心轮公转,并同时逆 时针自转,转速比=中心轮齿数/行星轮齿数;第二级差动齿轮减速机构(摆线针轮减速):曲 柄轴与行星轮相连因此同速转动,而铰接在三个曲柄轴上的两片摆线轮(RV齿轮)与固定的针 轮相啮合,当摆线轮摆动时针齿销迫使摆线轮沿针轮逐齿旋转。针轮偏移角度=1/针轮齿数。总 传动比=第一级转速比×第二级针轮偏移角度。
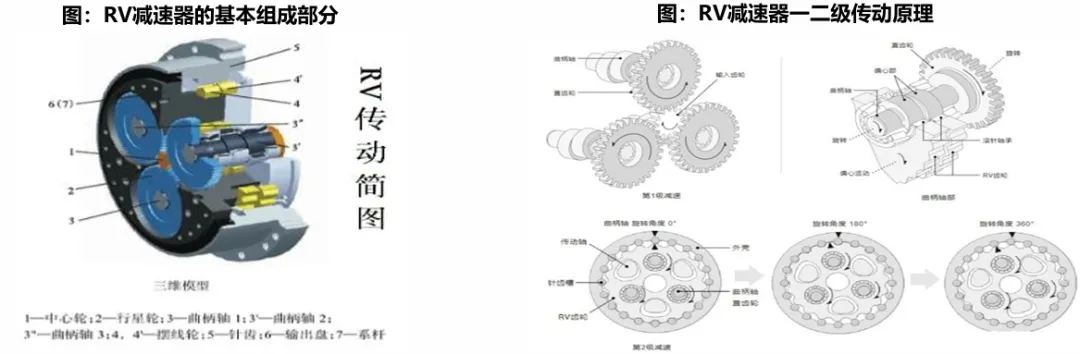
RV传动是一种有显著优势的新型传动。体积小、抗冲击力强、扭矩大、定位精度高等特点,广 泛应用于工业机器人、高端机床、医疗检测设备、卫星接收系统等领域。
RV减速器由摆线针轮和行星支架组成,工艺要求高、零部件复杂。1)工艺:各项工艺需密切 配合,包含齿形设计、齿面热处理、加工精度、成组技术等,由于结构复杂和零件众多带来误 差累积,会导致产品在使用过程中加速磨损和寿命缩减;2)零部件:RV减速器结构复杂,由 数十个甚至上百个零件组成,且传动比大,负荷大,对轴承要求高,摆线轮(RV齿轮)支撑轴承 位于曲柄轴和摆线轮之间,受限于减速器内部的空间、润滑、温升等因素,受力时易达到承载 极值,导致磨损和破裂,对零部件质量要求较高。
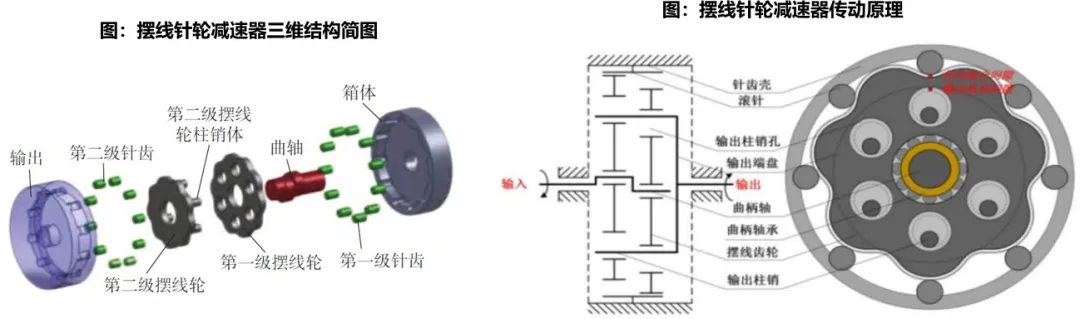
▪ 摆线针轮:摆线轮偏心旋转并与针齿啮合
摆线针轮减速器是RV减速器的一种,主要由输入机构、摆线轮、针轮及输出机构组成。1)输 入轴:连接输入端。包括输入轴、偏心轴、偏心套等,轴上通常有两个相位相差180度的偏心 结构,带动摆线轮做偏心运动。2)摆线轮:齿形为摆线曲线的齿轮,套在偏心轴的偏心套上 。3)针轮:内壁分布着若干针齿销;4)输出机构:包括输出轴、柱销孔等,摆线轮上的柱销 孔推动着输出柱销转动,柱销连着减速器的端盘作为输出机构。
摆线针轮如何减速?主要基于摆线轮的偏心旋转和摆线与针齿的啮合。电机驱动输入轴旋转, 带动偏心轴使摆线轮偏心旋转(绕轴中心公转并同时自转)。公转过程中摆线轮与针齿啮合, 因两者齿数差为1,针齿的反作用力迫使摆线轮反向自转一个齿距,即输入轴旋转一周,摆线轮自转"针轮齿数分之一周",从而达到减速效果传动至输出机构。摆线针轮减速器的传动比范 围大,单级传动比可达87。
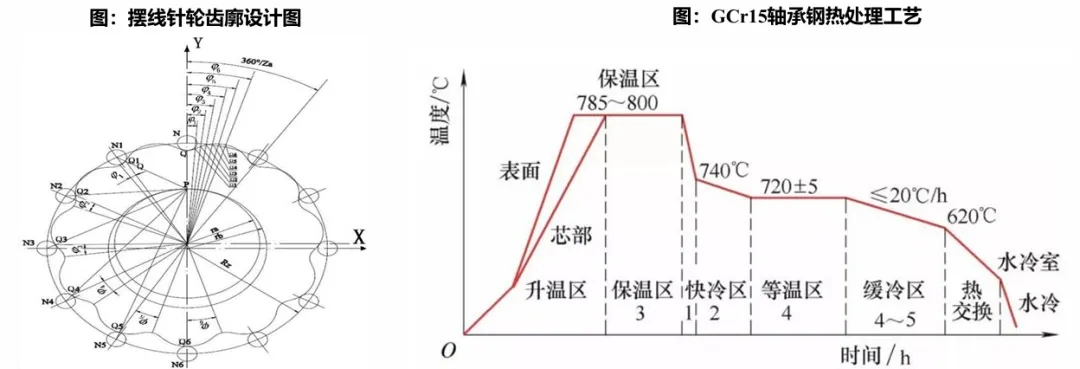
摆线针轮减速器难点主要体现在齿廓设计与制造。1)齿廓设计:摆线针轮设计与制造复杂, 其齿廓是基于针轮齿圈的共轭外摆线曲线,需通过复杂的啮合方程计算齿廓参数,对参数设计要求较高。此外还需要齿廓修形技术来形成合理齿隙保证啮合的润滑。2) 制造:摆线轮、针 齿销等主要零件采用材质较好的GCr15轴承钢制造,制造工艺复杂且精度高,同时需要热处理 ,需购买磨床和热处理设备,成本较高。
摆线针轮减速器具有刚性好、传动比大、结构紧凑、传动效率高和承载能力强等显著优点,同 时运转平稳、噪音低、寿命长,适用于高精度和重载场景。一是重工业领域(如冶金机械、起 重设备和工程机械),发挥其高负载和抗冲击能力;二是精密传动领域(如航空航天、机器人 、数控机床和医疗器械),满足高刚性、低噪音的需求。
▪ 从特斯拉Optimus出发,看减速器方案需求
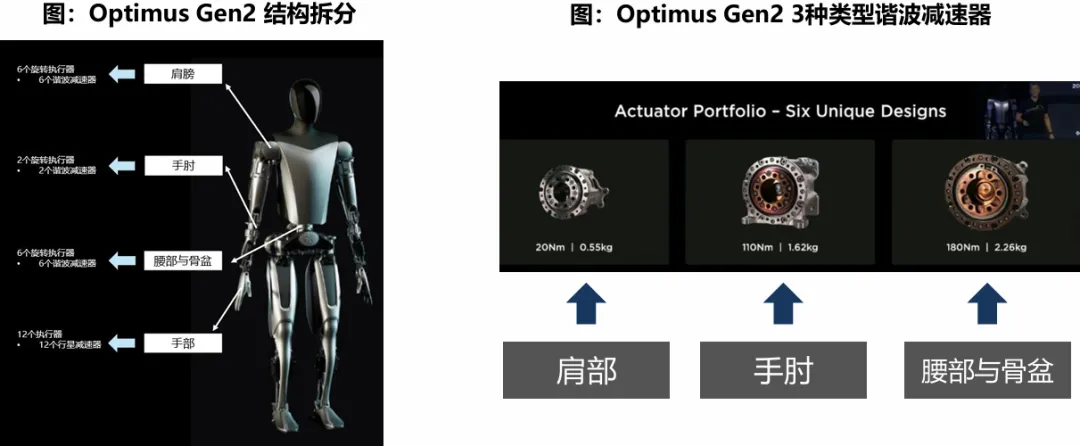
特斯拉Optimus Gen2需要12个行星减速器和14个谐波减速器。其中,谐波减速器用于肩 膀、手肘、腰部与骨盆的旋转关节处;行星减速器用于手部传动装置内,单手用量6个。
从减速器特性看,行星减速器和谐波减速器各有千秋:1)行星减速器的高承载能力及强抗 冲击能力的特性适配灵巧手应用场景,但精度有限,一定程度上无法满足高精度灵巧手需求 ;2)谐波减速器的免维护特性和高减速比适配肩膀、手肘、腰部与骨盆等大关节部位,但 成本高昂,与降本趋势不匹配。
我们认为,特斯拉手部采用行星减速器或出于降本需求,在肩膀、手肘、腰部与骨盆部位采 用谐波减速器或出于对高减速比的需求。
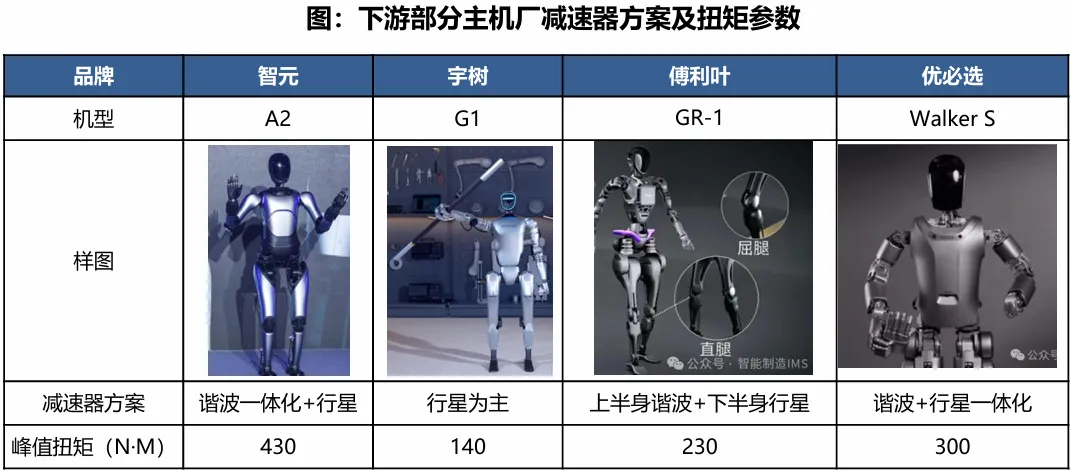
除特斯拉外,其余大部分具身主机厂亦采用谐波+行星的复合方案:1)智元远征A2搭载谐 波一体关节+自研的关节电机PowerFlow(内置高力矩透明度行星减速器);2)宇树G1搭 载带双编码器的行星减速器关节模组;3)傅利叶GR-1在上半身采用谐波减速器、下半身髋 关节则采用行星减速器;4)优必选则搭载谐波+行星减速器一体化关节。
从减速器各自特点看,以行星为主的减速器方案在成本端优势显著,如宇树G1售价仅为9.9 万元;谐波减速器能在扭矩方面提供更好的加持,故而下游采取行星+谐波复合方案的机型 的输出扭矩普遍更高。
哈默纳科将手部行星减速器替换为微型谐波减速器。哈默纳科的迷你执行器RSF-3C及RSF 5B集成谐波减速器、无刷伺服电机及编码器于一体,每根手指配备2-3个;东京大学提供的 采用RFS-3B和RFS-5A两种类型的谐波减速器灵巧手方案中,手指根部直径仅为20mm,接 近人手。此方案的成本虽更高,但高扭矩也使得灵巧手的性能得到大幅提升。RV减速器广泛应用于工业机器人如关节型、搬运、焊接、AGV机器人中,主要由于其扭矩 大于行星和谐波减速器,更适配工业场景。同时,高精度、大扭矩的特性也有望打开人形机 器人中腕部、腰部等应用场景。

当人形机器人满足整机可正常工作的前提下,性能提升是进一步发展方向。从降本/性能两 个大维度看,行星/RV分别是最优选择,但RV受限于体积,一般在工业机器人和人形大关节 部位应用较多,谐波减速器虽然成本高昂,但体积和性能较行星均有提升。综合来看,行星 和谐波拥有成为过去乃至当下的主流选择的基本盘。
摆线针轮新型减速器性能增量高于成本&体积增量,或为行星+谐波的进一步优化方案。摆 线针轮减速器齿轮啮合的构造使得其较行星精度更高、较谐波同体积扭矩输出能力更强、较 传统RV体积重量更小;但价格、体积/重量较谐波和行星略高。
综合来看,摆线针轮在大幅度提升人形机器人关节扭矩的情况下,成本和体积/重量增幅可 保持在可控范围内,且当前采用PEEK等轻量化材料打造的摆线针轮减速器可大幅降低自重 。我们认为,摆线针轮有望在人形肩部、腰部、下肢髋关节等大关节部位实现应用。

减速器是人形机器人旋转关节核心部件,通过降速增矩保证机器人运动控制的高精度与稳定性。减速器是连接动力源和执行结构的中间结构,我国减速器市场规模持续增长,减速器企业工艺水平不断提升,国产减速器供应能力日益增强。
来源:AGI具身智能



左右滑动查看更多
▲将我们设为「星标★」才能第一时间收到推送哦