导语: 当ChatGPT还在信息世界里"纸上谈兵",另一场更为深刻的智能革命已悄然降临物理世界。这不是简单的"大模型+机器人",而是一场从"能思考"到"能行动"的范式跃迁。2026年,全球物理AI市场规模突破51亿美元,中国以470台/万人的机器人密度位居全球前列——我们正站在人工智能发展最关键的分水岭。
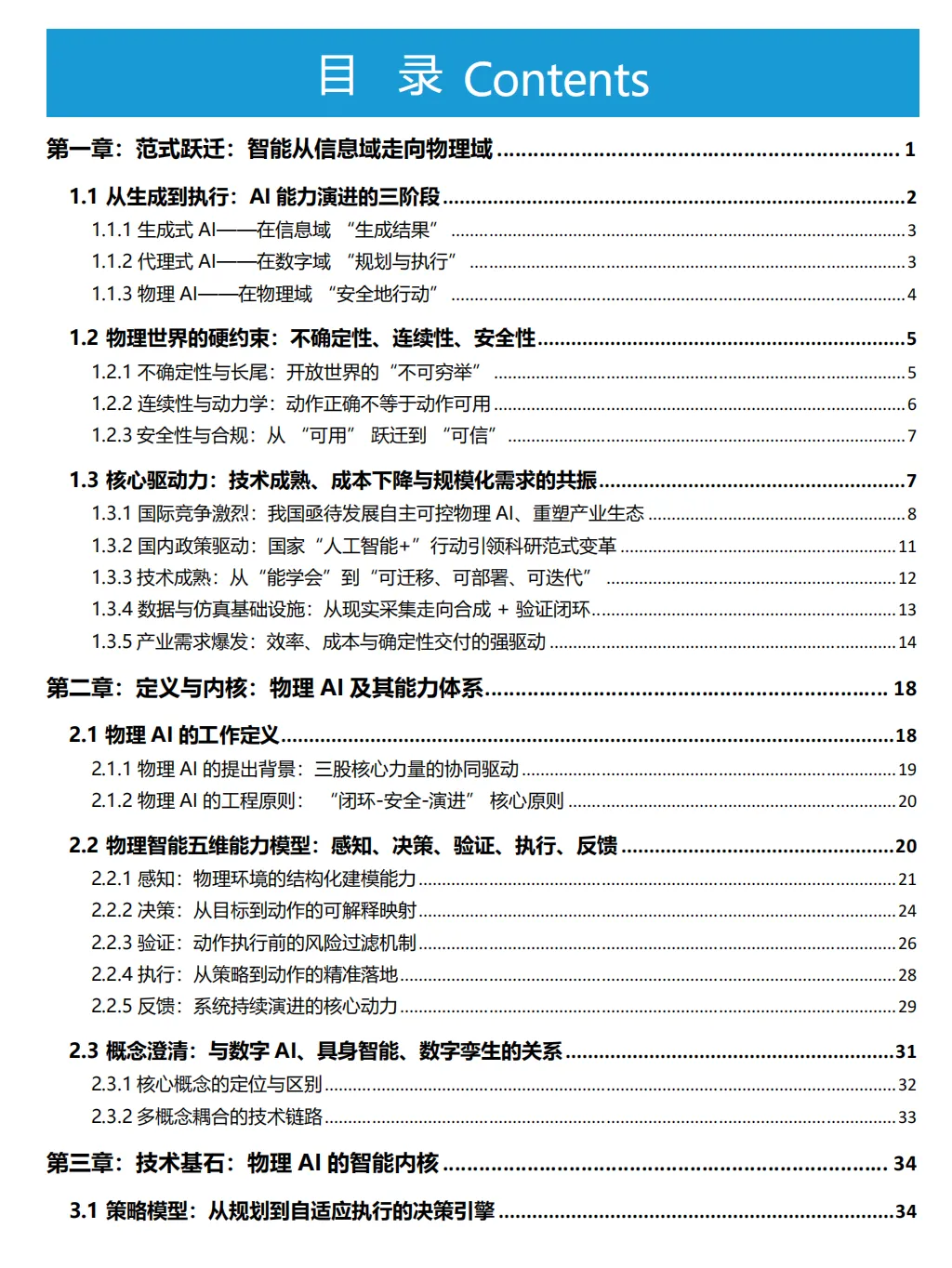
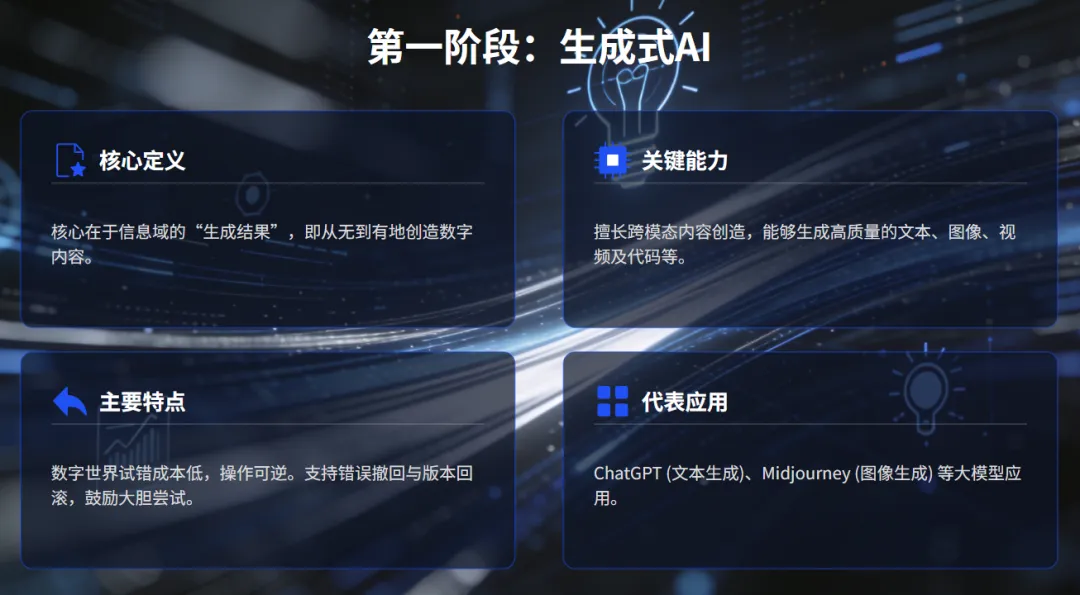
一、从"生成内容"到"改变物理世界":AI的三次进化
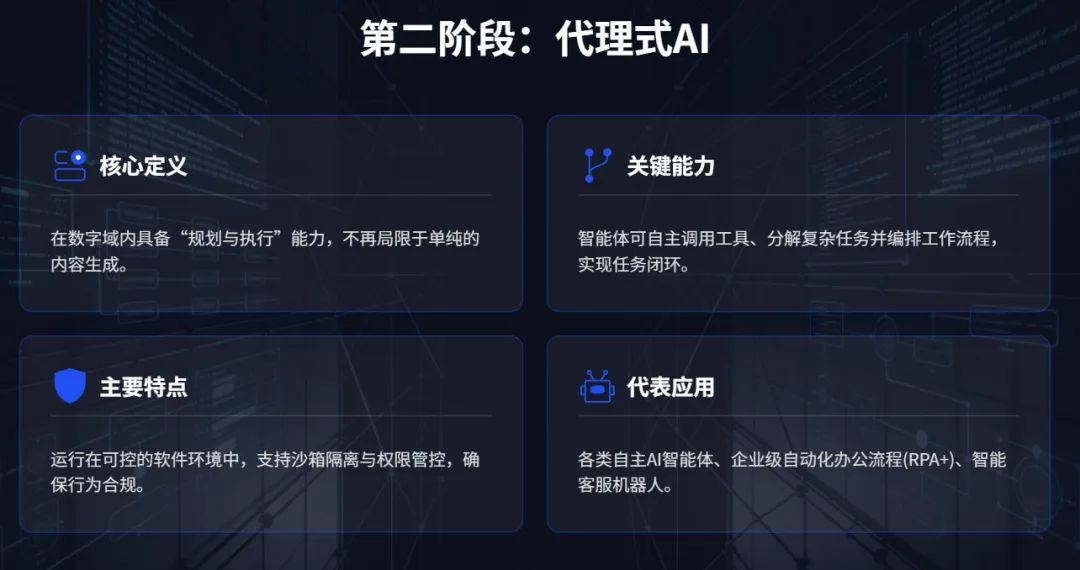
如果说生成式AI让机器学会了"说话",代理式AI让机器学会了"办事",那么物理AI(Physical AI)正在让机器学会"动手"——在真实的物理世界里,安全、可靠、精准地执行任务。

白皮书将这一演进清晰地划分为三个阶段:
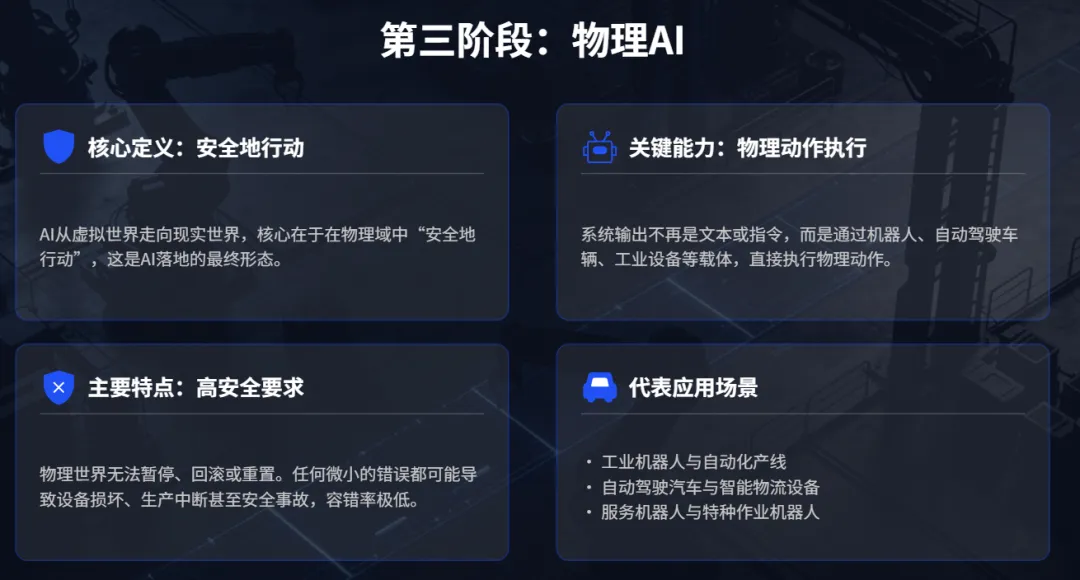
这就是为什么物理AI绝非"把大模型接入硬件"那么简单。它要求构建"感知-决策-验证-执行-反馈"的完整闭环,在不确定性、连续性、安全性的三重硬约束下实现可靠运行。
二、物理世界的"三重门":为什么物理AI如此艰难?
白皮书深刻指出,物理世界对智能系统施加了信息域根本不存在的硬性约束:
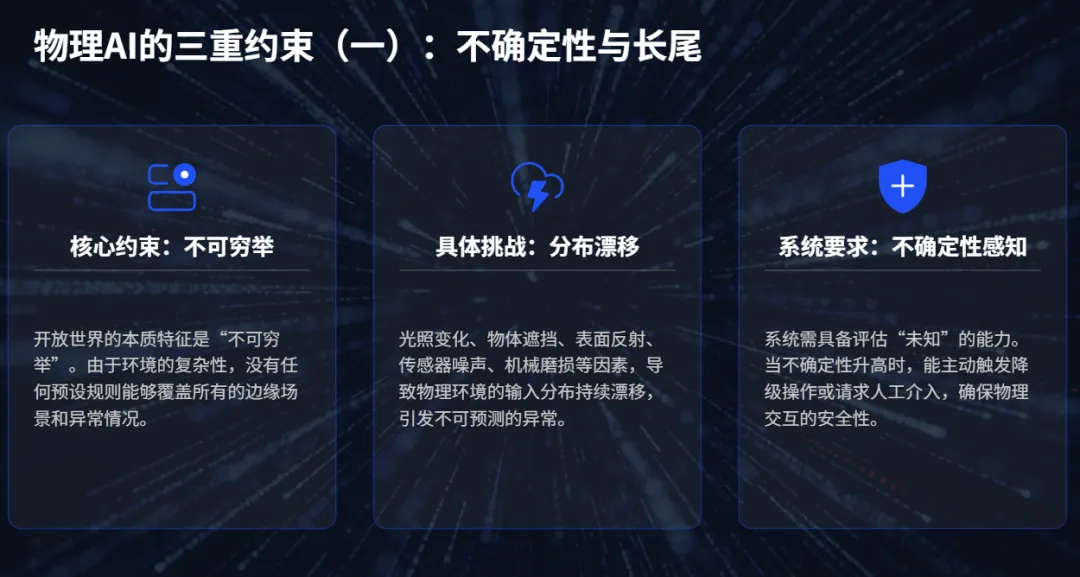
第一重:不确定性与长尾——开放世界的"不可穷举"
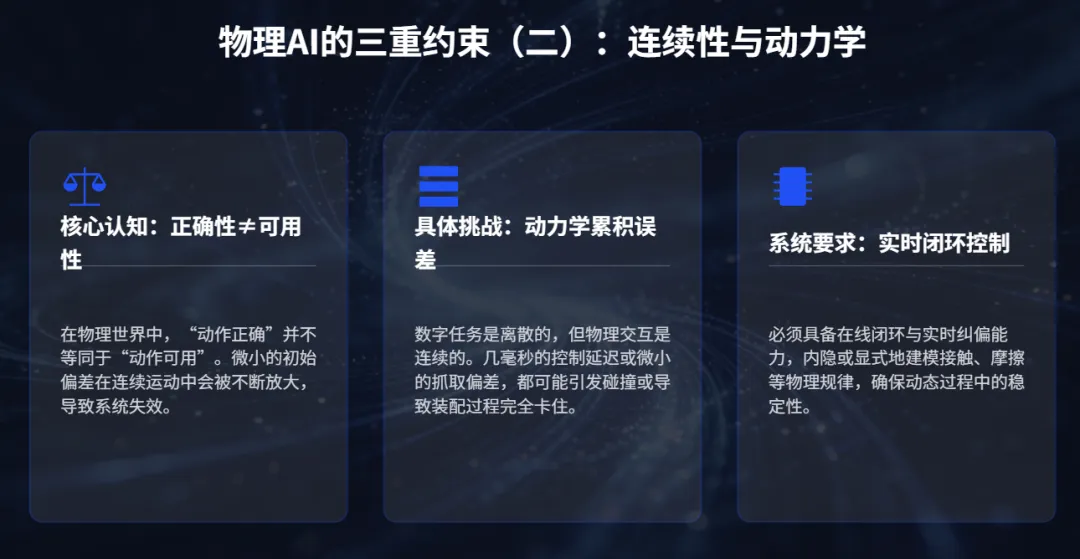
第二重:连续性与动力学——"动作正确"不等于"动作可用"
第三重:安全性与合规——从"可用"到"可信"的跃迁

三、五维能力模型:物理AI的"操作系统"
白皮书首次系统构建了物理智能五维能力模型,这五个维度并非线性串联,而是多回路耦合的协同系统:
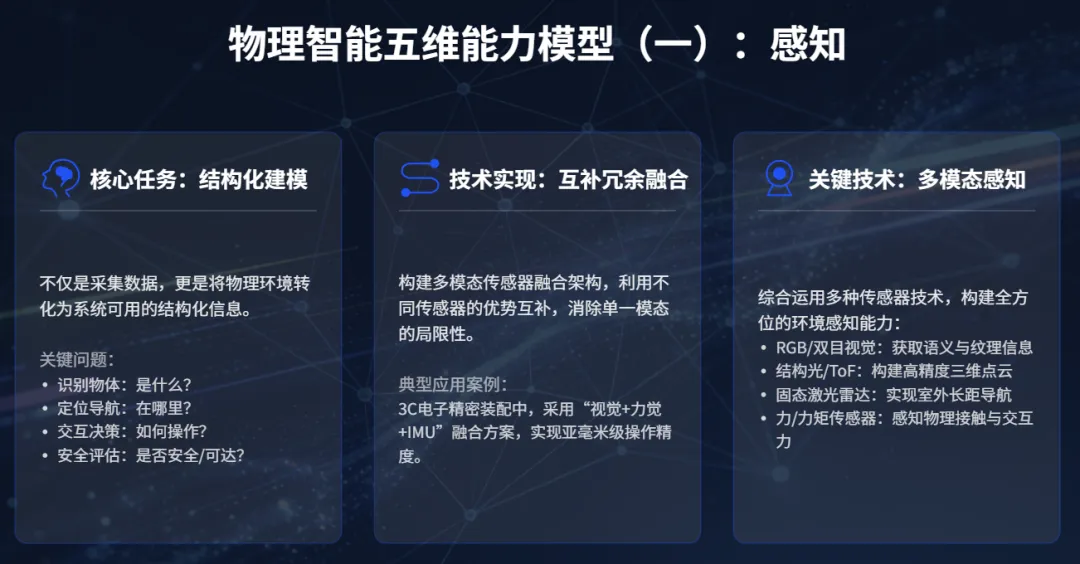
1. 感知:物理环境的结构化建模
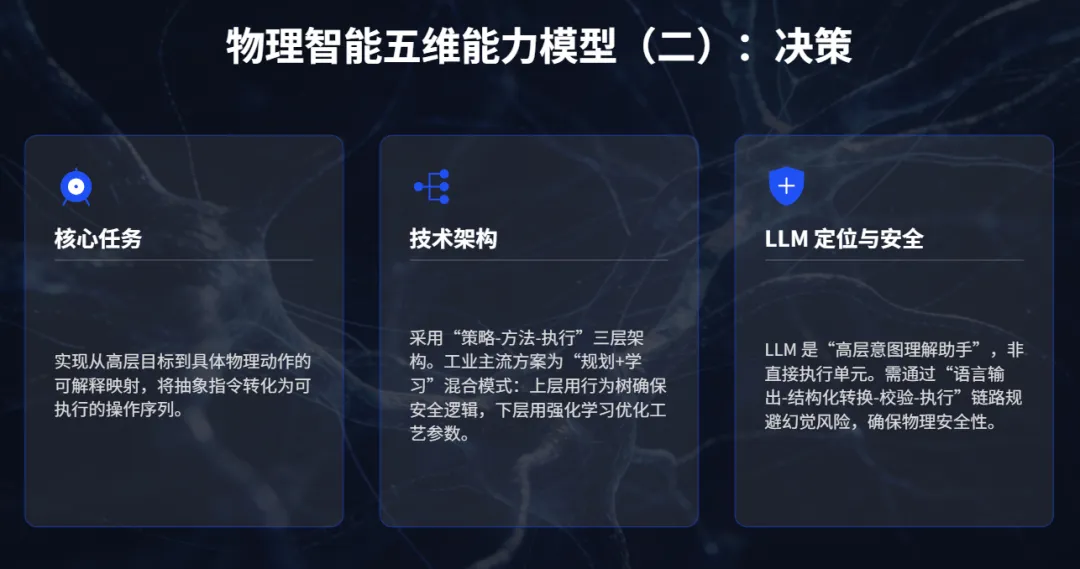
2. 决策:从目标到动作的可解释映射
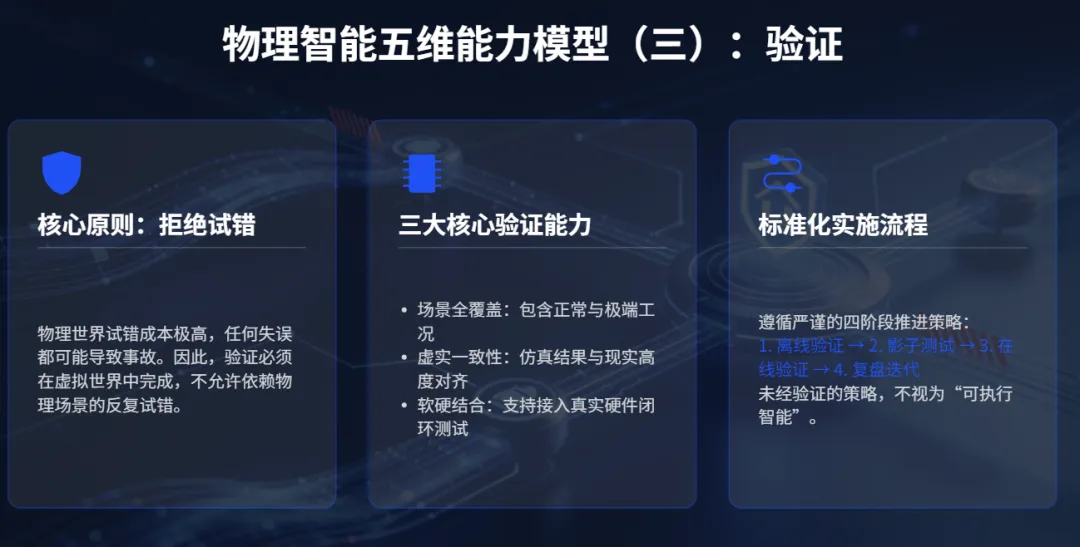
3. 验证:动作执行前的风险过滤
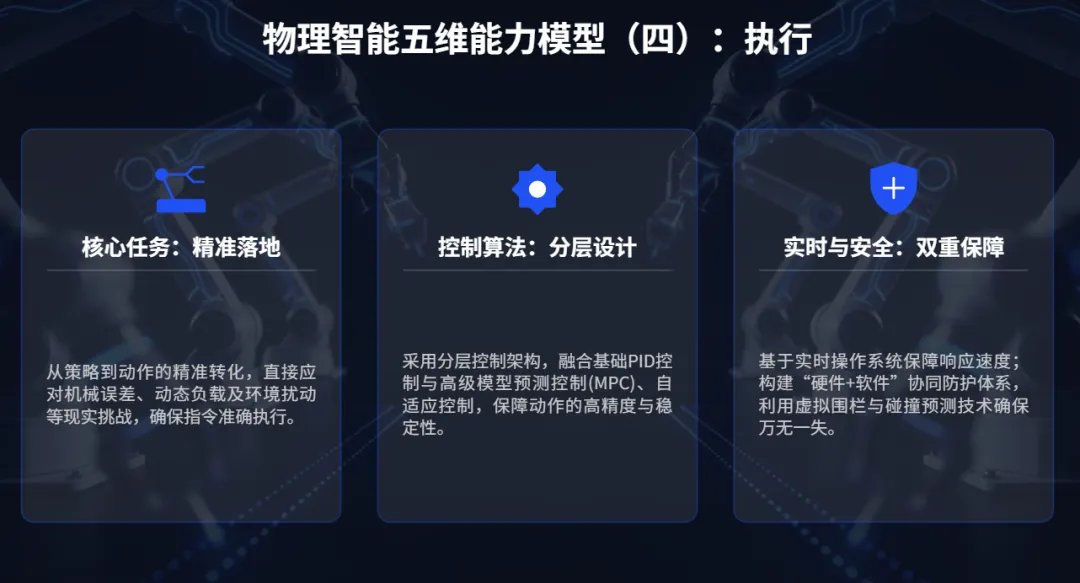
4. 执行:从策略到动作的精准落地
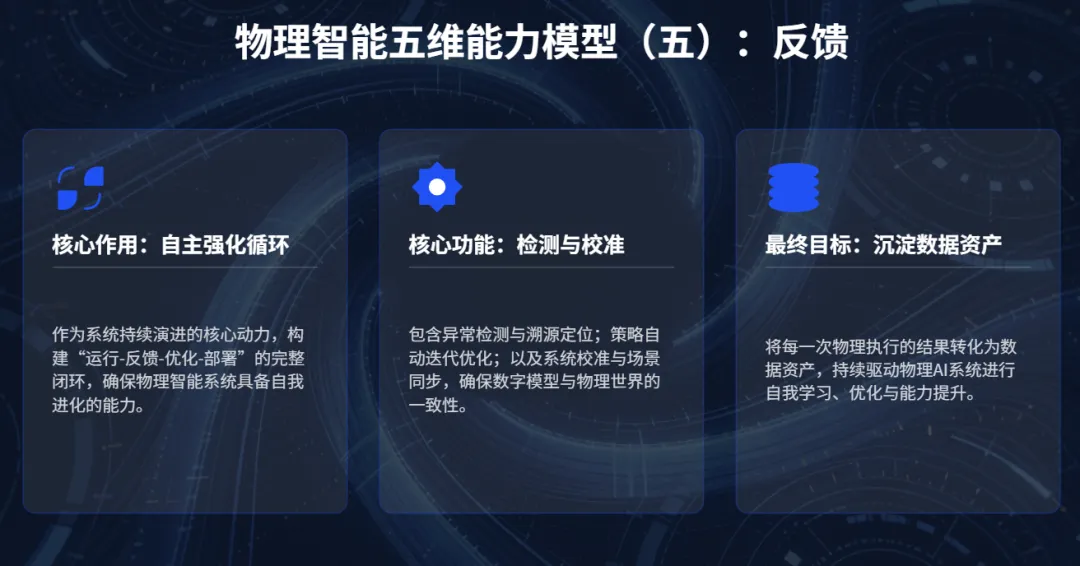
5. 反馈:系统持续演进的核心动力
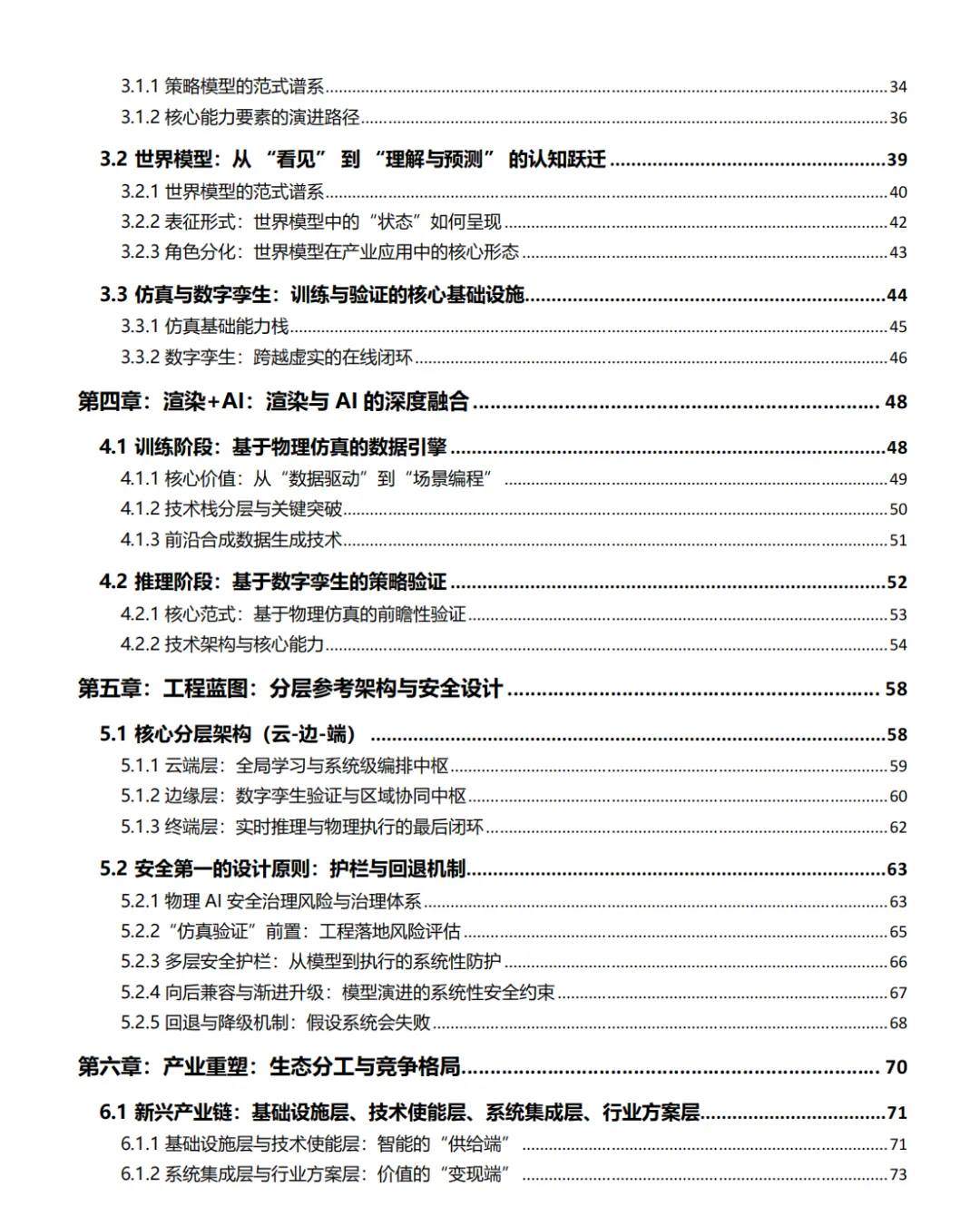
四、三大技术基石:策略模型、世界模型、仿真数字孪生
1、策略模型:从规划到自适应执行的决策引擎
作为端到端的具身多模态大模型,策略模型深度融合视觉感知、语言理解与动作生成能力。当前呈现四大范式演进:
自回归式范式(如OpenVLA):将动作离散化为token按序生成,天然兼容视觉-语言指令跟随,适合多任务与强语义泛化
生成式连续策略范式(如RDT-1B、π0):将动作建模为从噪声到可执行轨迹的生成过程,强调轨迹平滑性与多模态动作分布
层级式/快慢双系统范式(如GR00T N1、Helix):慢推理负责任务理解与约束,快控制负责高频稳定执行,安全与治理能力挂载在高层
隐式/潜动作范式(如LAPA):从无动作标签视频中学习潜动作,降低对大规模遥操作数据的依赖
2、世界模型:从"看见"到"理解与预测"的认知跃迁
世界模型是物理AI的"认知中枢"与"推演沙盘",核心功能在于构建能够模拟物理世界动态演化规律的内部表征,使智能体在执行实际动作前即可在潜空间中进行前瞻推演。
五大技术范式并存:潜变量动力学模型(Dreamer系列,在潜空间中想象轨迹)、表征预测型世界模型(JEPA/V-JEPA,预测未来场景的语义表征)、视频生成型世界基础模型(NVIDIA Cosmos,作为神经仿真器与数据引擎)、3D/几何结构驱动世界模型(OccWorld、I2-World,直接建立几何层面的物理一致性约束)、NSP范式(Next State Prediction,预测物理世界的下一个状态)。
世界模型在产业应用中分化为四种核心形态:规划与推演引擎(决策沙盘)、风险预测与量化模块(支持安全决策的量化指标)、安全约束优化器(在线优化的安全过滤器)、合成数据与系统评测引擎(生成长尾场景与对抗性测试用例)。
3、仿真与数字孪生:训练与验证的核心基础设施
仿真平台的核心能力栈包括:物理真实性(接触、摩擦、碰撞的高保真求解)、传感器仿真真实性(噪声、延迟、标定误差的系统建模)、场景与资产生产效率、运行效率与并行扩展能力、可重复性与可观测性。
数字孪生则实现了三大能力跃迁:实时状态同步(毫秒级同步构建可计算镜像)、场景复现与复盘(精准重构事故场景沉淀为测试用例)、并行评估与发布门控(孪生系统与实际系统同步运行,提前识别分布外失效)。
五、"渲染+AI"融合:破解数据瓶颈与验证难题
物理AI面临两大基础性挑战:高质量交互数据的"千倍级缺口",以及系统安全验证的复杂性。"渲染+AI"融合技术正成为关键突破路径。
1、训练阶段:从"数据驱动"到"场景编程"
传统范式下,模型训练完全依赖真实世界采集的数据,成本高、风险大、难以覆盖长尾场景。"场景编程"新范式下,开发者通过可编程仿真环境直接"编写"训练场景,将数据生成过程抽象为软件工程问题——通过代码控制物理参数、环境变量、任务目标,系统化生成海量、多样、自带精准真值的合成数据。
技术栈分层包括:硬件层(面向物理AI优化的异构算力平台)、接口层(Vulkan/OpenGL/OpenCL等统一标准)、基座层(高精度渲染引擎、高保真物理引擎、全链路传感器仿真)、应用层(数据生成、强化学习、人工示教、环境建模)。
2、推理阶段:基于数字孪生的策略验证
世界模型虽能高效预测环境动态,但其基于高维环境概率性压缩的本质,可能导致"物理幻觉"——潜在空间中合理的动作序列,在真实物理世界中因微小几何干涉而失败。
"渲染+AI"在此阶段构建以物理仿真为最终验证权威的策略守护系统。数字孪生扮演"几何与物理的终极护栏"角色,执行严格的碰撞检测、运动学可行性分析与动力学模拟,确保每个被执行的策略在物理层面绝对可行且安全。
前瞻性验证范式包含三阶段:实时状态同步与数字化建模(毫秒级同步,显式建模不确定性)、策略物理可行性验证(几何层、物理层、任务层三层次验证)、安全决策生成与自适应干预(监控预警、过滤拦截、动态修正三级响应)。
六、云-边-端架构:工程落地的分层设计
物理AI系统采用云-边-端三层参考架构,遵循三大根本原则:
1、云端层:全局学习与系统级编排中枢
承担基础模型、世界模型、策略模型的集中训练与迭代
以版本化方式发布可审计、可追溯、可回滚的模型与策略
负责跨区域、多系统的任务编排与资源协同
严格遵循"非实时性"原则:所有下发策略必须允许在近端被拒绝、降级或覆盖
2、边缘层:数字孪生验证与区域协同中枢
运行与真实环境强同步的高保真数字孪生,进行执行前安全验证(碰撞检测、运动边界检查、负载合规性分析)
承担多智能体系统的协调调度,优化作业序列、路径规划与任务分配
作为区域安全策略承载节点,实时汇聚设备状态数据,自主触发作业降级或人工介入
核心定位:拥有对终端动作的"授权执行与否决权",而非承担硬实时控制任务
3、终端层:实时推理与物理执行的最后闭环
实时推理能力完全下沉:所有参与控制闭环的计算模型本地部署,具备严格时延保证,不依赖外部网络
确定性控制与执行:毫秒级甚至微秒级确定性闭环控制,电机驱动、力觉交互、姿态调整完全本地管理
本质安全与失效保护机制:网络中断时自主切换至预设安全模式,保留本地急停装置、动态速度限制、空间边界防护等硬安全措施
七、产业格局:四层生态与三大制高点
物理AI产业正从"链式单向传递"向"网状动态协同"演进,形成四层生态结构:
1、基础设施层:算力与硬件基石,呈现"云边协同、仿真增强"特征。中国智能算力规模预计2026年达1460.3 EFLOPS,万卡级集群成为主流。边缘与端侧算力向专用芯片演进,仿真计算成为新型算力形态。
2、技术使能层:多模态基础模型(策略模型、世界模型)与高保真仿真工具链,降低开发门槛、加速技术迭代。
3、系统集成层:软硬件协同的融合中枢,将算法模型与机器人本体、传感器、执行器深度工程化融合,竞争重点转向开放、高效、确定性的软硬件融合平台。
4、行业方案层:深耕场景的"价值翻译者",将通用技术能力转化为可量化、可复制的行业解决方案。当前呈现清晰梯队:第一梯队(仓储物流、先进制造,高ROI、快落地)、第二梯队(医疗健康、特种作业,高价值、高门槛)。
三大竞争制高点已明确:
仿真平台:视觉真实性、物理真实性、并行计算效率三大核心能力,决定模型训练效率与性能上限。
工具链与数据闭环:打通从数据生成到部署监控的全流程,构建"运行-反馈-优化-部署"的自主强化循环,形成"数据飞轮"竞争壁垒。
核心硬件:高性能机器人关节、精密力矩传感器、专用AI芯片、高带宽低延迟通信模块等"卡脖子"环节。
八、中国路径:场景牵引、工程落地、生态协同
在全球物理AI竞争中,中国正展现出独特的发展路径:
数据支撑:中国工业机器人密度2023年达470台/万人(全球前列),2024年新装约29.5万台,保有量突破200万台,本土品牌份额升至57%。超过6000家AI企业、400+国家级专精特新"小巨人"企业构成产业链中坚力量。
应用案例:
美团自动配送体系:累计配送近500万单,自动驾驶里程1300万公里(占比99%),测试运营路线340条;无人机开通64条航线,累计完成订单超60万单。
人形机器人工厂实训:优必选等企业已将人形机器人部署于汽车制造、物流产线,实现与无人物流车、无人叉车、工业移动机器人的协同作业。

医疗康养:深圳市第二人民医院联合企业研发40余种康复机器人,外骨骼机器人通过AI动态捕捉步态,助力偏瘫患者重建行走能力。
厂商布局:
华为:依托"算力(昇腾)-模型(盘古)-平台(华为云机器人平台)"自主可控技术栈,深入制造、矿山、农业等复杂行业场景。
腾讯:基于游戏引擎能力构建高保真机器人仿真训练环境,Robotics X实验室专注多智能体强化学习与协同控制。
小鹏汽车:将高阶智能驾驶技术(XNGP)的感知架构、规划与控制模型复用于人形机器人及飞行汽车,形成"智能驾驶→人形机器人→低空飞行器"立体产品矩阵。
宇树科技、智元机器人:代表中国在机器人硬件创新与敏捷工程化方面的全球竞争力,H1人形机器人、远征A1已在工业场景试商用。
九、未来展望:从"效率工具"到"系统重构"
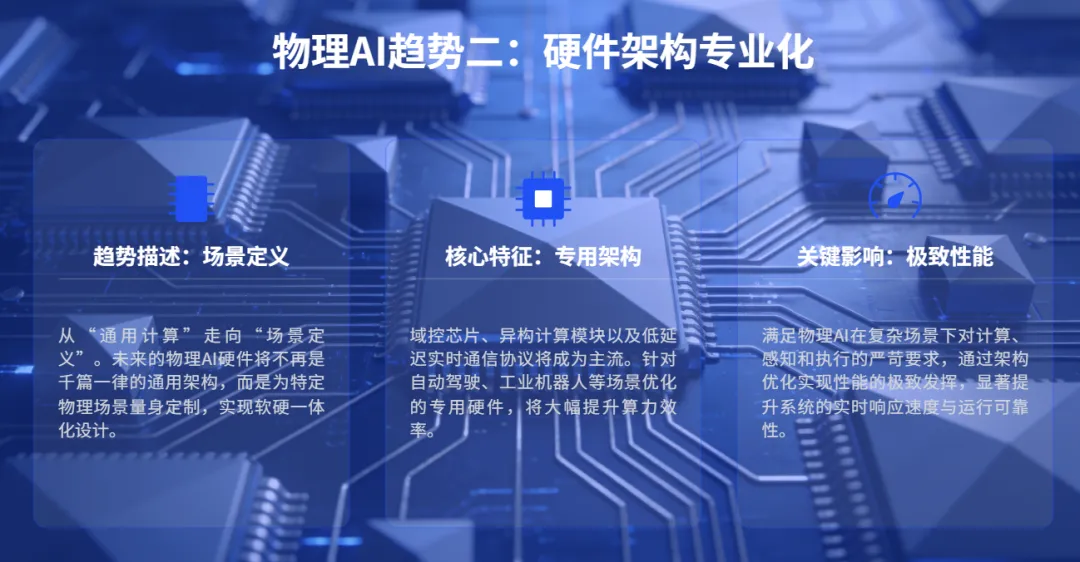
白皮书预测,2024-2030年物理AI将呈现五大趋势:



结语:开启可执行机器智能的新纪元
物理AI的发展绝非坦途。它既是技术创新的竞赛,也是工程能力的比拼,更是生态建设的艺术。中国拥有全球最完整的制造业体系、庞大的工程师红利、强大的数字化基础设施——但要将这些优势转化为胜势,需要以十年磨一剑的定力,在基础研究上持续投入,在工程实践上精益求精,在生态建设上开放共赢。
当机器智能真正学会理解并尊重物理世界的规律,当人工智能从"思考"走向"行动"、从"实验室"走向"生产线"、从"概念愿景"走向"广泛现实",我们迎来的将不仅是效率的提升,更是生产力形态的根本重塑——人机关系从"操作-执行"升级为"目标-协同"。
2026年,物理AI正从技术验证走向规模化部署的战略窗口期。这不是一场可以缺席的竞争,而是一次必须赢得的未来。
......
如果您想下载本篇精选报告《2026物理AI白皮书迈向可执行的机器智能》(124页),请扫下述星球二维码进入星球,按报告名称搜索即可。