


当汽车开始以分布式计算系统的方式运行,系统最先承受压力的,往往不是算力,而是:
通信。
一、每一次汽车电子的跃迁,都始于通信能力的变化
回顾过去 40 年的车载通信演进,可以看到一条清晰的技术主线:
1986|CAN:解决“能不能通信” 2015|CAN FD:解决“数据量不够” 2021|CAN XL:尝试解决“更大的数据帧” 今天:问题已经不再是带宽本身,而是 确定性、可预测性与系统级协同能力
从欧洲车载通信白皮书中得出的判断:
汽车正在从“ECU 的集合”,演化为“分布式实时计算系统 ”。
而以 CAN / LIN 为代表的传统车载总线体系,已经难以从系统层面支撑这一转变。
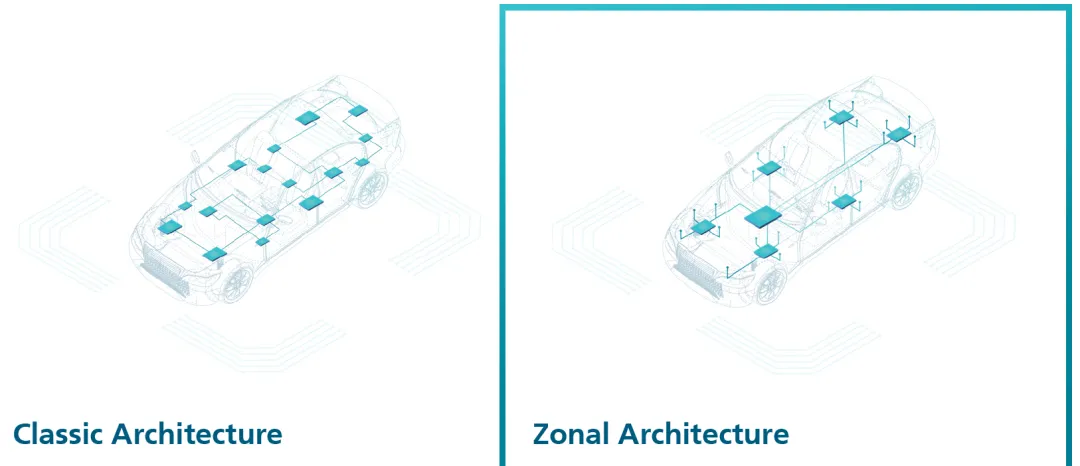
二、架构升级:从 ECU 分布式,到 Zonal 区域架构
汽车Zonal Architecture(区域架构)的出现,并不是为了“更集中”,而是为了系统性降低整车复杂度。
其核心逻辑可以概括为一句话:
按物理区域,而非功能模块,组织汽车电子系统。
在 Zonal 架构中:
区域控制器就近接管传感器与执行器 计算与决策能力上移至中央计算平台 以太网、CAN、LIN 等通信方式被重新分工、协同使用:
以太网承载高速、跨域与集中计算数据 CAN 承担实时、关键控制任务 LIN 服务于低成本、非关键节点
Zonal 架构的价值,并不体现在性能提升上,而体现在对系统复杂度的整体压缩:
线束大幅简化 区域聚合连接,线束长度与重量可下降 50% 以上。 硬件与功能解耦 软件成为系统演进的核心载体。 天然适配 OTA 与 SDV 功能升级不再依赖 ECU 更换。 支撑中央计算与 AI 闭环 感知—决策—执行首次具备系统级结构基础。
其目标并非“替换一切”,而是建立清晰的通信层级与系统边界。
三、Zonal 架构的真正门槛: 通信必须具备“确定性”
在 Zonal 架构下:
制动、转向等安全控制流 感知数据、AI 推理与诊断信息 开始在同一张网络上并行运行
这对通信提出了一个根本性要求:
不是“尽量快”,而是“在确定时间内必达 ”。
这已经不是简单的协议叠加问题,而是通信范式本身的变化。
四、确定性以太网的工程答案:TSN
在欧洲的工程实践中,这一答案已经非常明确:
时间敏感网络 TSN(Time-Sensitive Networking)
TSN 并非单一协议,而是一整套系统级能力体系,包括:
统一的时间基准 确定性的调度机制 安全与非安全流量的共网承载与隔离
其核心能力可以概括为三点:
纳秒级时间同步 确保所有节点运行在同一时间基准之下。 确定性调度机制 关键数据具备明确的时间窗口、优先级与带宽保障。 混合流量共网能力 控制流、感知流与普通数据并行运行而互不干扰。
也正因为如此:
ADAS 线控底盘 中央计算 + OTA
最终都会收敛到 TSN 以太网通信底座。
五、德国 TSN 方案:可交付的 TSN IP 核

德国车规级 TSN IP 核 的工程定位非常清晰:
集成至 FPGA / ASIC 支持 IEEE 802.1 TSN 全栈 面向车载与机器人实时控制 已在欧洲真实项目中验证
需要强调的是:
TSN IP核 不是芯片,也不是软件。
它是直接嵌入 车载 SoC 内部的确定性通信能力模块:
作为以太网交换逻辑的中枢 在芯片内部完成时间同步与调度控制 向上层系统透明提供确定性通信能力
TSN 的确定性,是在芯片底层被工程化固化的能力。
正因如此,它才能真正支撑Zonal 架构、中央计算与车规级量产落地。
写在最后
行业仍在讨论“下一代汽车架构长什么样”,真正的分水岭已经出现:
是停留在架构设想,还是进入工程兑现。
Zonal 架构重构了汽车系统形态,而确定性通信,决定这套形态能否成立。
TSN,正在成为新汽车架构背后的隐形基础设施。
而这,正是国内汽车通信亟待完成的关键转变:
先引入欧洲成熟、经过工程验证的通信技术,
再逐步构建自主的、真正具备工程落地能力的
底层通信技术体系。
(完)
