机器人关节电磁制动器是一种集成在机器人关节(电机/齿轮箱/执行器传动系统)中的电驱动制动模,通过电磁力与弹簧/永磁系统配合,在需要时对旋转轴施加保持扭矩(holding torque),实现断电安全锁止、防下坠、防失控,并在部分方案中支持紧急停机(E-Stop)/动态制动。

产品技术现状:核心竞争点正在从“扭矩”转向“能量指标 + 可靠性 + 易集成”
动态制动(E-Stop capable)产品相比纯保持抱闸,最显著的变化是:能量化指标被显式写进规格/选型。
“单次急停允许能量/切换能量”等指标成为标配(例如产品资料里给出 Max. switching energy per ES、急停转速上限、总工作量等),这使得产品从“通用抱闸”升级为“可工程计算的安全部件”。
摩擦材料与热管理被强化:例如有的系列强调“高 emergency stopping energy”、并针对粘连/磨耗优化摩擦片(减少长期抱闸后粘连、提升耐磨)。
低功耗与温升控制仍是硬约束:关节空间狭小、散热差,厂商会强调低能耗/可在高环境温度下工作。
集成化趋势明显:面向伺服电机/减速器/关节模组的多种安装选项与形态(适配电机端、齿轮电机、关节内置)。
工程应用现状:主流架构仍是“电制动减速 + 机械制动锁止”,但对机械制动的 E-Stop 能力要求在上升
在多数机器人里,正常减速仍主要由伺服驱动器完成;机械电磁制动器更多承担安全冗余。但随着对安全停机边界条件(转速、惯量、重力轴)的重视,越来越多项目会选“保持为主 + 有限E-Stop能力”或“操作/停止制动(operating brake)”版本来覆盖最坏工况。
需求端现状:从“只要抱得住”走向“要能安全停得住 + 抱得住”
机器人应用更强调功能安全与冗余:在紧急停机、驱动器失效、失电等场景下,需要制动器不仅能保持,还要能在轴仍旋转时吸收动能并制停(厂商常直接标注“可用于 EMERGENCY STOP braking”或“emergency stop function”)。
多关节机器人/轻量化关节(尤其协作机器人)带动“小空间高性能”:关节内置、空心轴走线等需求增加,推动薄型化与大内径方案。
当前痛点:动态能力=热与磨耗的代价,选型更“系统化”
热与磨耗是动态制动器的硬约束:能量越大、急停越频繁,对摩擦副寿命、温升、维护周期影响越显著,所以厂商会用“急停允许能量/次数/总工作量”来限定使用边界。
从“买一个制动器”变成“按轴级负载谱选型”:同一台机器人,不同关节轴(高速轴/重力轴/大惯量轴)会采用不同等级的制动器配置,这是目前工程落地的主流做法。
全球销量
2024年全球机器人关节电磁制动器销量达965.61千台
2024年中国机器人关节电磁制动器销量达279.22千台
随着机器人安全等级的提升与工况复杂性增加,关节用电磁制动器正在从传统“保持抱闸”向具有动态制停能力、状态感知与系统级安全能力的智能制动子系统演进。同时,产品朝高能量吸收、热管理优化、关节内置化、与控制系统协同与安全协议集成方向发展,并在国产化与多场景应用中加速渗透。
从“保持制动”向“动态与安全制动能力”跃升
过去多数关节电磁制动器主要用于断电抱住/定位保持(holding),不强调在轴运动中吸能;现在随着机器人安全标准(ISO 10218 / ISO 13849 / ISO/TS 15066 等)要求更高、E-Stop 场景更复杂,动态制动能力成为必答题。
从标准化向“关节级/轴级定制”迈进
过去:标准化的伺服电机制动器/抱闸尺寸与规格繁多但都是“通用配件”。
现在与未来:
“按轴工况/负载谱定制制动器”成为趋势:
重力轴、转速轴、惯量轴分别用不同规格;
不同机器人类型(工业臂、协作机器人、移动操控臂、医疗机器人臂)对性能侧重点不同:重载轴 → 高能量动态制动;高速轴 → 高频急停耐受;轻载轴 → 更轻更薄,更低温升。
从“被动存在”向“智能化/状态感知”迈进
现状挑战:目前大多数电磁制动器是被动机械部件,没有状态反馈。
未来趋势:
引入状态传感:位置/开合确认;摩擦片磨损程度;温升/热状态;累积急停能量;
通过CANopen Safety / EtherCAT FSoE / ProfiSafe等工业协议反馈制动器状态到主控制器;与机器人安全控制器建立闭环安全策略。
材料与热管理技术持续演进
核心问题:动态制动涉及大量动能转化为热量,在关节这种散热受限空间更难处理。
趋势方向:更高摩擦耐热材料与配方;多层复合摩擦片与衬片设计;优化热扩散结构(导热路径、散热片集成);结合热仿真设计与验证流程;提高单位体积的制动能量吸收能力。
向安全标准与认证靠拢
为什么会这样:随着机器人进入更高风险场景(人机协作、医疗服务、公共环境),原有“选配”安全制动变成“安全必备 + 有认证依据”。
表现形式:电磁制动器开始出现在安全规范/风险评估指导文件中;厂商产品会给出认证级别建议(PL / SIL 关联建议);与安全控制器的协同验证(Emergency Stop safety chain validation)。
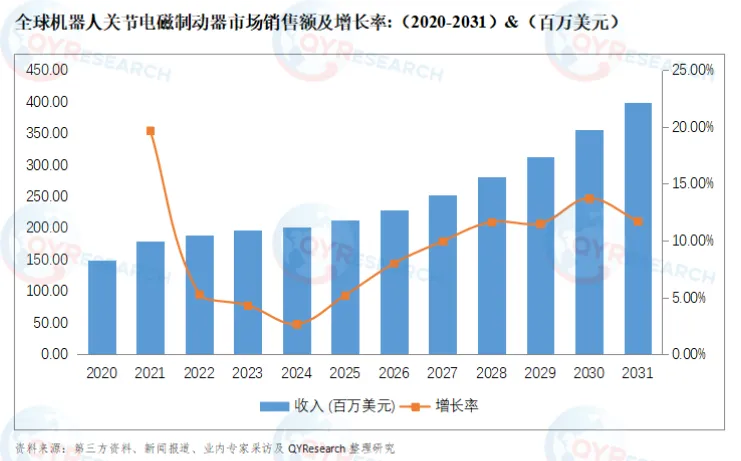
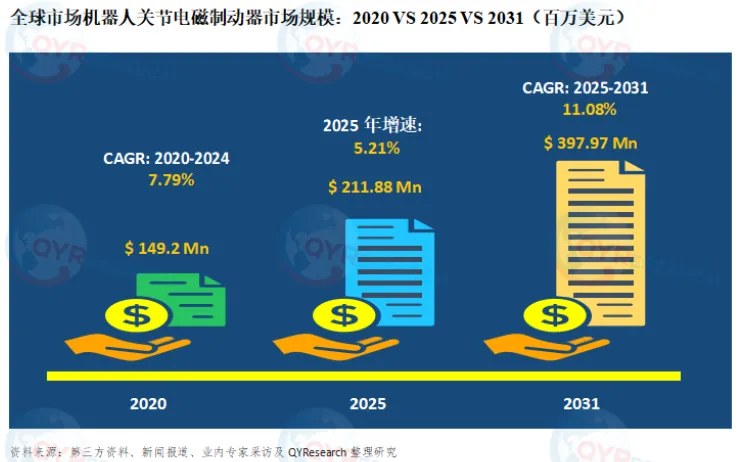
根据QYResearch(恒州博智)的统计及预测,2024年全球机器人关节电磁制动器市场销售额达到了201.39百万美元,预计2031年将达到397.97百万美元,年复合增长率(CAGR)为11.08%(2025-2031)。地区层面来看,中国市场在过去几年变化较快,2024年市场规模为50.11百万美元,约占全球的24.88%,预计2031年将达到109.17百万美元,届时全球占比将达到27.43%。
消费层面来说,目前日本地区是全球最大的消费市场,2024年占有39.4%的市场份额,之后是中国和欧洲,分别占有24.88%和18.71%。预计未来几年,中国市场增长最快,2025-2031期间CAGR大约为12.75%。
生产端来看,日本和欧洲是两个重要的生产地区,2024年分别占有29.27%和34.55%的产量份额,预计未来几年,中国产量将保持最快增速,预计2031年份额将达到18.32%。
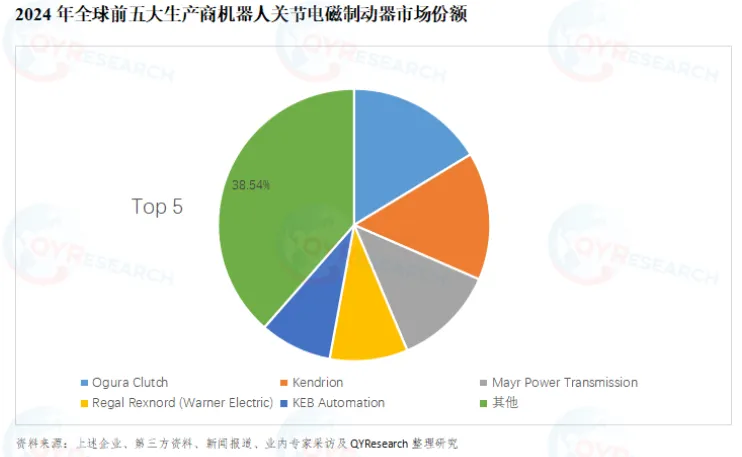
从生产商来说,全球范围内,机器人关节电磁制动器核心厂商主要包括Ogura Clutch,Kendrion,Mayr Power Transmission,Regal Rexnord (Warner Electric),KEB Automation,Miki Pulley,瑞迪智驱,堂奕电子,Precima,Nexen Group,SEPAC和芑创电子等。2024年,全球前三企业,共占有43.62%份额。
从产品类型方面来看,保持制动占有重要地位,预计2031年份额将达到80.82%。过去多数关节电磁制动器主要用于断电抱住/定位保持(holding),不强调在轴运动中吸能;现在随着机器人安全标准(ISO 10218 / ISO 13849 / ISO/TS 15066 等)要求更高、E-Stop 场景更复杂,动态制动能力成为必答题。
轻量化与小型化(薄型化、大内径、空心轴走线)倒逼结构与材料升级 关节空间受限使传统制动器“厚度大/扭矩密度不足”的问题突出,推动薄型环形结构、磁路优化、摩擦材料与热管理改进。
同时就应用来看,工业机器人在2024年份额大约是79.28%,未来几年CAGR大约为10.75%。工业机器人向“更高速、更重载、更高惯量”演进,带动“动态制动(E-Stop)”等级产品需求更大动能意味着急停时需要制动器具备“制停+保持”的能力,产品从单纯holding向可量化E-Stop能力升级(能量、次数、热管理指标)。
工业机器人向“更高速、更重载、更高惯量”演进,带动“动态制动(E-Stop)”等级产品需求
更大动能意味着急停时需要制动器具备“制停+保持”的能力,产品从单纯holding向可量化E-Stop能力升级(能量、次数、热管理指标)。
安全标准更新与合规压力提升,推动高可靠、可验证的制动方案渗透
ISO 10218(工业机器人安全)持续演进,强调风险降低与安全设计要求;协作机器人安全规范(ISO/TS 15066)也强化了安全停机等协作运行模式的落地,间接推高对安全链条中制动与保持能力的重视。
轻量化与小型化(薄型化、大内径、空心轴走线)倒逼结构与材料升级
关节空间受限使传统制动器“厚度大/扭矩密度不足”的问题突出,推动薄型环形结构、磁路优化、摩擦材料与热管理改进。
市场扩张到医疗/移动/公共环境,带来更高的安全冗余与状态感知诉求
医疗与公共环境对“可预测停机、低噪音/低振动、可靠锁止”更敏感;行业也在探索关节集成制动与更高层次安全能力。
技术与产品风险
热与磨耗的物理极限约束。动态制动需要把动能转为热量,而关节空间小、散热差,容易导致温升过高、摩擦材料退化或粘连。
轻量化与可靠性之间的矛盾。协作、人形机器人要求轻薄、小型化,但制动能量、寿命与热容量往往与体积正相关。
系统耦合复杂,集成失败风险高。制动器必须与伺服、驱动、安全控制器协同工作;接口、电气与安全逻辑耦合度高。
市场与需求风险
机器人行业周期性波动。工业机器人投资强烈依赖宏观经济与制造业周期。价格压力与国产替代冲击。中国本土厂商进入,价格竞争激烈。
客户自制/集成倾向增强。大型机器人厂商可能自行开发或与电机/关节模组深度集成制动方案。
供应链与成本风险
关键原材料价格波动。NdFeB 永磁体、铜、特种摩擦材料价格波动大。
高端材料与工艺依赖海外。部分高性能摩擦材料、磁材、弹簧钢仍依赖少数国际厂商。
法规与合规风险
安全标准演进带来合规压力。新标准可能提高制动性能、诊断或冗余要求。
商业模式风险长验证周期与客户锁定。进入BOM需长时间验证,一旦落选很难短期进入。
本文内容基于QYResearch行业报告。欲了解包括市场占有率及企业排名在内的完整分析,参考完整版报告《全球与中国机器人关节电磁制动器市场现状及未来发展趋势》
如您感兴趣了解详情,需申请报告样本。
请添加微信客服:qyresearch999
或登陆QYResearch官网咨询。
著作权归QYResearch所有。商业转载请联系作者获得授权,非商业转载请注明出处。
Ogura Clutch Kendrion Mayr Power Transmission Regal Rexnord (Warner Electric) KEB Automation Miki Pulley 瑞迪智驱 堂奕电子 Precima Nexen Group SEPAC 芑创电子 | 保持制动 动态制动 |
工业机器人 协作机器人 医疗机器人 其他 | |
北美 欧洲 中国 日本 韩国 东南亚 |
报告章节主要内容如下:
第1章:报告统计范围、产品细分及主要的下游市场,行业背景、发展历史、现状及趋势等
第2章:全球总体规模(产能、产量、销量、需求量、销售收入等数据,2020-2031年)
第3章:全球机器人关节电磁制动器主要地区分析,包括销量、销售收入等
第4章:全球范围内机器人关节电磁制动器主要厂商竞争分析,主要包括机器人关节电磁制动器销量、收入、市场份额、价格、产地及行业集中度分析
第5章:全球机器人关节电磁制动器主要厂商基本情况介绍,包括公司简介、机器人关节电磁制动器产品型号、销量、收入、价格及最新动态等
第6章:全球不同产品类型机器人关节电磁制动器销量、收入、价格及份额等
第7章:全球不同应用机器人关节电磁制动器销量、收入、价格及份额等
第8章:产业链、上下游分析、销售渠道与客户分析等
第9章:行业增长驱动因素、发展机遇、风险、SWOT分析、行业政策等
第10章:报告结论
2026年全球及中国机器人关节电磁制动器企业出海开展业务规划及策略研究报告
https://www.qyresearch.com.cn/reports/6502596/robot-joint-electromagnetic-brake
2026年全球机器人关节电磁制动器行业总体规模、主要企业国内外市场占有率及排名
https://www.qyresearch.com.cn/reports/6477888/robot-joint-electromagnetic-brake
2026-2032全球及中国机器人关节电磁制动器行业研究及十五五规划分析报告
https://www.qyresearch.com.cn/reports/6477885/robot-joint-electromagnetic-brake
2026年全球电磁制动器行业总体规模、主要企业国内外市场占有率及排名
https://www.qyresearch.com.cn/reports/6452589/electromagnetic-brakes
2026-2032全球与中国电磁制动器市场现状及未来发展趋势
https://www.qyresearch.com.cn/reports/6397202/electromagnetic-brakes
全球木制包装行业调研报告(市场规模、行业趋势、产业链上下游)
中国汽车ABS和ESC系统市场现状研究分析与发展前景预测报告
全球数据中心用干式变压器行业总体规模、主要企业国内外市场占有率及排名
海量数据 全球发行
200+国家数据库,8000万+企业数据库
定制调查 品质保证
19+年行业经验,68000+全球客户
权威引用案例分享
全球最大的媒体英国BBC广播公司(British Broadcasting Corporation)引用了QY Research出版的建筑机器人行业分析报告 美国陶氏化学(Dow Chemical)引用了QYResearch出版的食品软包装薄膜市场报告 日本经济新闻社(Nikkei Shimbun)收录了QYResearch出版食品报告中的数据 国际四大会计师事务所之一安永(Ernst & Young)引用了QYResearch出版的企业级SaaS市场规模分析报告 韩国上市企业(Caregen)引用了QYResearch出版的医美仿生肽原料行业分析报告 美国史赛克(Stryker )医疗科技公司引用了QYResearch出版的外周介入产品报告 清华大学孵化企业(NeuraMatrix)引用QYResearch发布的脑机接口报告数据 三只松鼠股份有限公司在半年报中引用了恒州博智出版的国内植物蛋白饮料报告 爱玛科技集团股份有限公司引用了QYResearch出版的高性能电动摩托车市场报告
更多权威引用信息可到官网浏览(持续更新)