


用于汽车应用的数字码调制(DCM)雷达白皮书精读
DIGITAL CODE MODULATION(DCM) RADAR FOR AUTOMOTIVE APPLICATION,Wayne Stark https://www.uhnder.com/images/data/DCM_Radar_for_Automotive_Application_Final.pdf
1. 文章主旨与问题背景:车载雷达走向“高分辨 + 高对比 + 抗干扰”
这篇白皮书从车载自动化等级提升带来的感知需求增长展开:雷达在夜间、雨雾等条件下仍可工作,同时可直接测径向速度(多普勒),因此是 ADAS/自动驾驶的关键传感器。但是随着车辆上雷达数量增加,互扰会变得突出,从而逼迫雷达体制在“分辨率、判别力、干扰鲁棒性”方面一起升级。
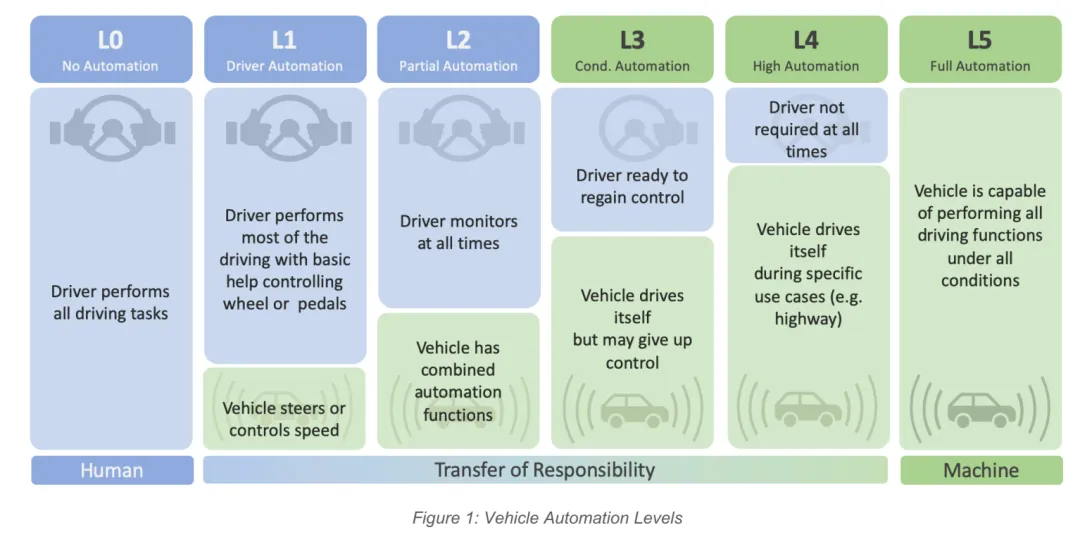
Figure 1: 越往高阶走,系统需要更可靠地识别更远、更小、更密集、更复杂的目标集合(特别是弱目标贴近强反射体时),并且要在更短的刷新周期内完成感知闭环。

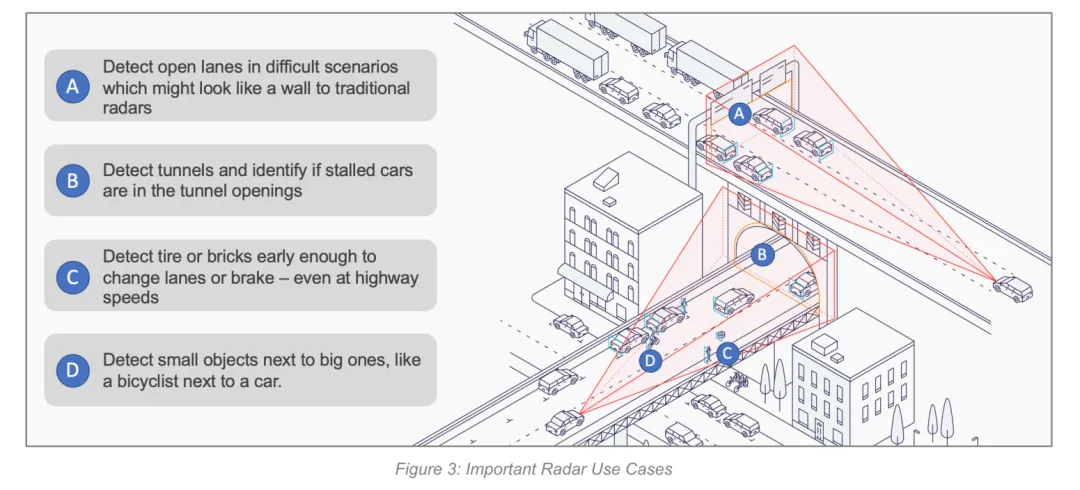
Figure 2 与 Figure 3: 这部分展示典型车辆多雷达布置(前向长距、角雷达、后向等)以及关键用例(如 ACC、AEB、盲区、交叉路口等)。图面展示了“同一时间同一频段会有更多雷达在发射”,这会把互扰从偶发问题变成系统级瓶颈。
2. 雷达要测什么:距离、速度、角度与阵列带来的“虚拟孔径”
雷达的核心测量维度归纳为距离 、径向速度 、方向(方位/俯仰)。单发单收(SISO)能较直接地完成距离与速度估计;测角通常要靠扫描或多天线阵列。多发多收(MIMO)通过把不同发射通道与不同接收通道配对,构造出更多“虚拟接收通道”,等价于把阵列孔径做大,从而提升角分辨率。

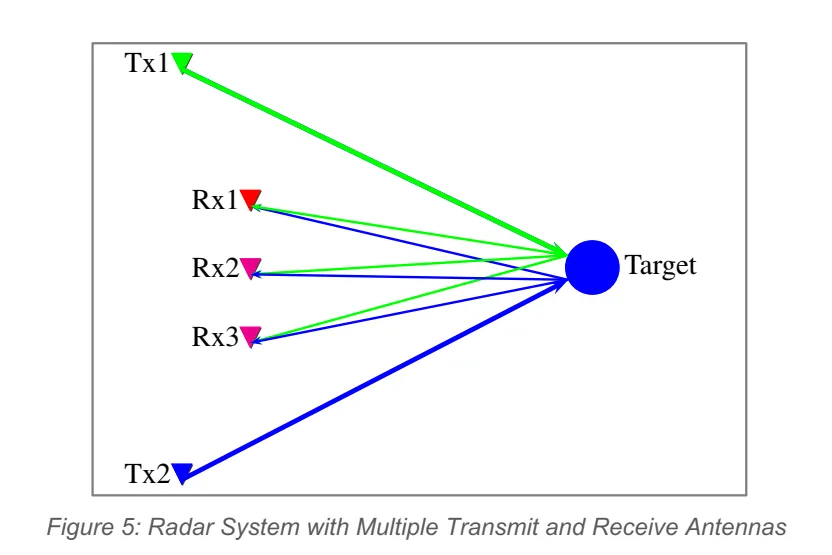
对应 Figure 4 与 Figure 5: 左侧 SISO 示意强调“单通道也能测距测速”;右侧以 的例子说明可以形成 个虚拟阵元。角分辨率与等效孔径近似成反比,虚拟阵列把孔径拉大后,同样视场中能分开的角间隔更小。
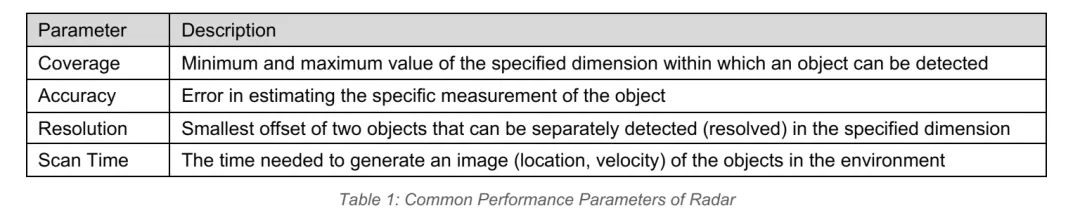
表 1 中把性能指标组织为覆盖范围、精度、分辨率与扫描时间;并特别点明传统“分辨率”定义常默认两目标 RCS 相同,但车载更关心强弱目标紧邻时能否分开,因此引出 HCR(High Contrast Resolution)。
3. FMCW/FCM 的数学骨架:从线性调频到拍频,再到 、 与
先给出 FMCW/FCM 的发射信号模型:中心频率 ,瞬时调制 ,发射功率 :
对静止目标,回波相当于延时 的版本,且距离与延时关系为
关键机制在于:线性调频的瞬时频率随时间变化,延时后的回波在任意时刻对应的是“过去某一时刻的频率”,因此同一时刻发射与接收频率不同,混频后出现拍频 ,并且 与 (进而与 )成正比。
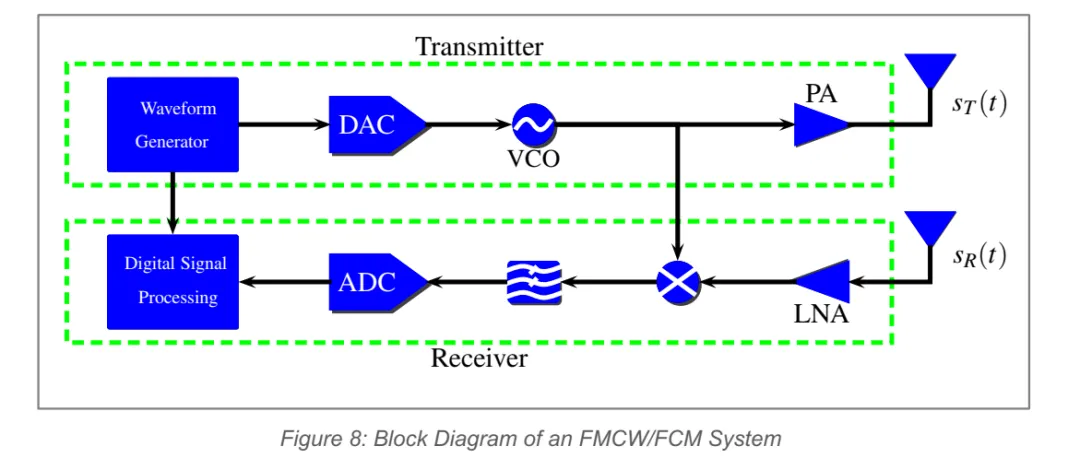
Figure 8: 这是典型 FMCW/FCM 收发链路:VCO 产生线性斜坡(或分段斜坡),一方面送至功放和天线发射,另一方面作为本振参与下变频;接收端混频、低通、ADC 后进入数字域。图面突出的是“模拟域完成频率差提取”,数字域主要做 FFT 与后端检测。
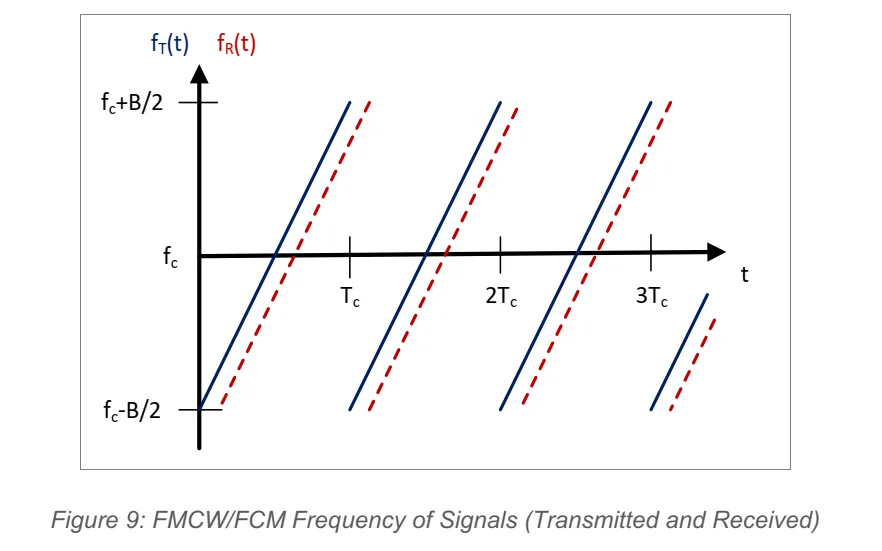
对应 Figure 9: 该图用频率—时间图展示:发射 chirp 是一条斜线,回波是延时后的平行斜线;在同一时刻,两条线的垂直差就是频率差,经混频转成拍频。图的视觉重点是:延时越大,垂直差越大,拍频越高。在此基础上,文章给出最大可探测距离与接收低通带宽 的关系:若最大拍频不超过 ,则最大距离为
并进一步指出采样率 (Nyquist)会决定最大无歧义距离:若拍频超过 会折叠,导致远距离“映射成”近距离,从而最大无歧义距离为
距离分辨率方面,原文通过“两目标拍频差”与 FFT 频率分辨率的关系推到经典结论:
这里需要强调文章隐含的要点: 虽然只由 决定,但 FFT 形成的距离响应(主瓣与旁瓣形状)会直接影响强弱目标相邻可分性,也就是后面的 HCR。
4. DMR/DCM 的数学骨架:相位码、匹配滤波与“拇指钉”距离响应
文章把 DCM 视作数字调制雷达(DMR)的一类:载波仍是 ,但相位 按 chip 间隔离散跳变,发射信号写为
并规定在每个 chip 内相位保持常值:对整数 ,当 时,。
二相(BPSK)情形可写成 的符号序列乘载波,文章指出这种相位/符号变化会把频谱扩展到与 chip 速率同阶的带宽,从而仍能用大带宽获得高距离分辨率。

DCM 的“距离成像”不靠拍频,而靠匹配滤波(相关):把接收到的基带信号与本地码做相关,输出近似是码的自相关函数随延时的扫描。于是只要码的自相关“主峰尖、旁瓣低”,距离响应就呈“针尖”形状(thumbtack-like),强目标的能量更难在距离上拖尾覆盖弱目标,这直接提升 HCR。
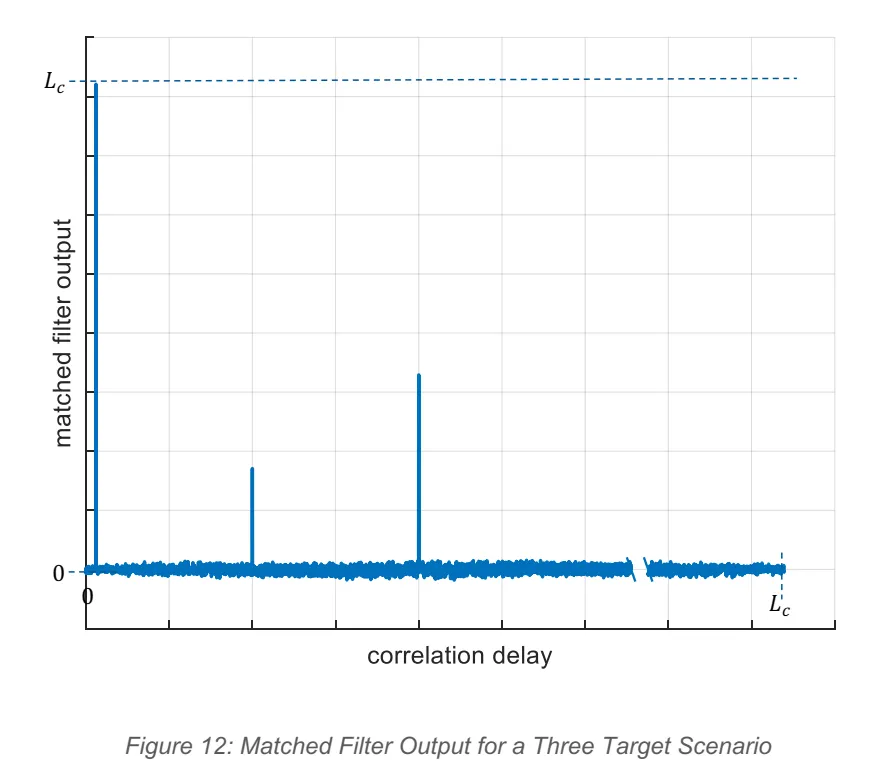
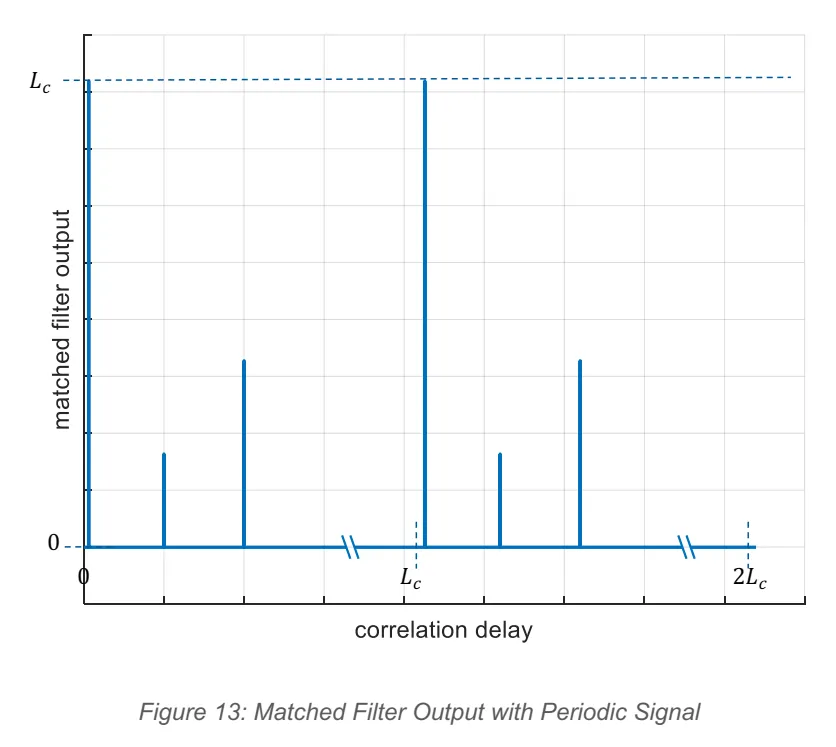
Figure 12 与 Figure 13: 图中给出三目标时匹配滤波输出随延时的曲线:三个尖峰对应三个目标距离;对比“非周期发送”与“周期发送”,可以看到周期情况下背景更均匀、非峰值更低(或者更可控)。DCM 的距离响应更像一根根“针”,而不是一团“宽主瓣 + 明显旁瓣”的能量堆。
文章直接给出 DCM 距离分辨率与 chip 宽度的关系:两个目标若其往返时延差小于一个 chip,相关主峰会重叠而不可分,因此
又因为通常 ,于是得到同样的形式
但与 FMCW 的差别在于距离响应形态:FMCW 的 FFT 距离谱旁瓣结构与窗函数、泄漏等高度相关;DCM 由码自相关主导,天然更接近“尖峰 + 低旁瓣”的理想形状,从而在高动态场景(强弱目标共存)更有优势。
5. 多普勒与速度:从 IQ 旋转到无歧义速度与速度分辨率
经典多普勒关系:往返传播导致频移与速度满足
速度估计的核心不是“单次测量”,而是“重复观测”:在 DCM 中,每次匹配滤波可以得到某个距离单元的复数输出(I/Q),重复 次后,这些复数点会以与 成正比的角速度在复平面旋转。
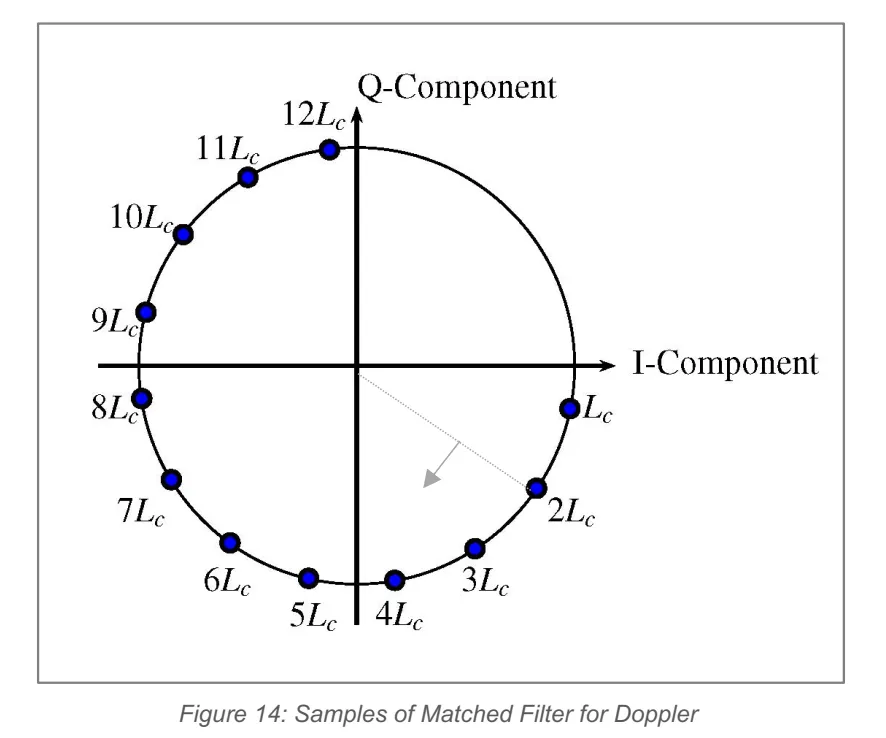
Figure 14:图中把每次相关输出画在 IQ 平面上形成近圆形轨迹:旋转方向代表接近或远离,旋转速度代表多普勒大小。对车载处理而言,这意味着在“慢时间”维度做 FFT,就能把不同速度的目标分离出来。
进一步给出无歧义速度的概念:若在一个码周期(或等效重复间隔)内相位转过 ,会发生速度混叠。用这一物理直观推导出无歧义速度边界,并给出速度分辨率为“无歧义窗口宽度除以 ”的结果:
注意这里出现的 其实是“每次相关输出之间的等效重复周期”(码周期),因此 就是总相干观测时间;观测越久速度越细,但刷新率(扫描时间)会变长,这是车载雷达无法回避的系统折中。
6. MIMO 复用方式与 DCM 的“天然 CDM”:通道隔离为什么靠码长
文章对比 TDM/CDM/FDM MIMO(表 2),强调 TDM 会让扫描时间随 Tx 数增长,同时最大无歧义速度随 Tx 数下降;CDM 允许多个 Tx 同时发射,通过不同码分离,代价是数字处理更重,但能保持速度性能并缩短扫描时间。同时也明确指出:DCM 天然采用 CDM MIMO——不同 Tx 使用不同扩频码。
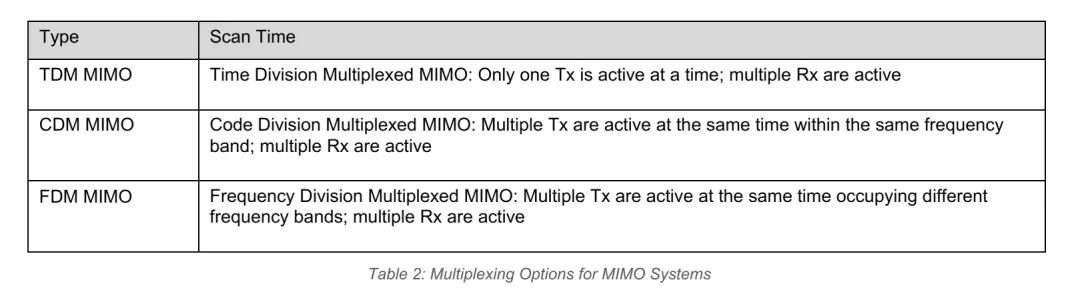
表 2: 三种复用方式的优缺点:TDM 的优势是分离简单,但时间代价高;FDM 需要更大带宽与更复杂滤波;CDM 在同频同时间并发发射,通过码的相关性实现分离,强调“并发”对车载短刷新周期的意义。
多 Tx 的关键问题是“通道隔离”:若 Tx1 与 Tx2 的码互相关不够低,那么 Tx2 的能量会泄漏进 Tx1 的匹配滤波输出,表现为底噪/旁瓣抬升,从而吞噬弱目标。文章指出隔离主要靠更长码长提升。
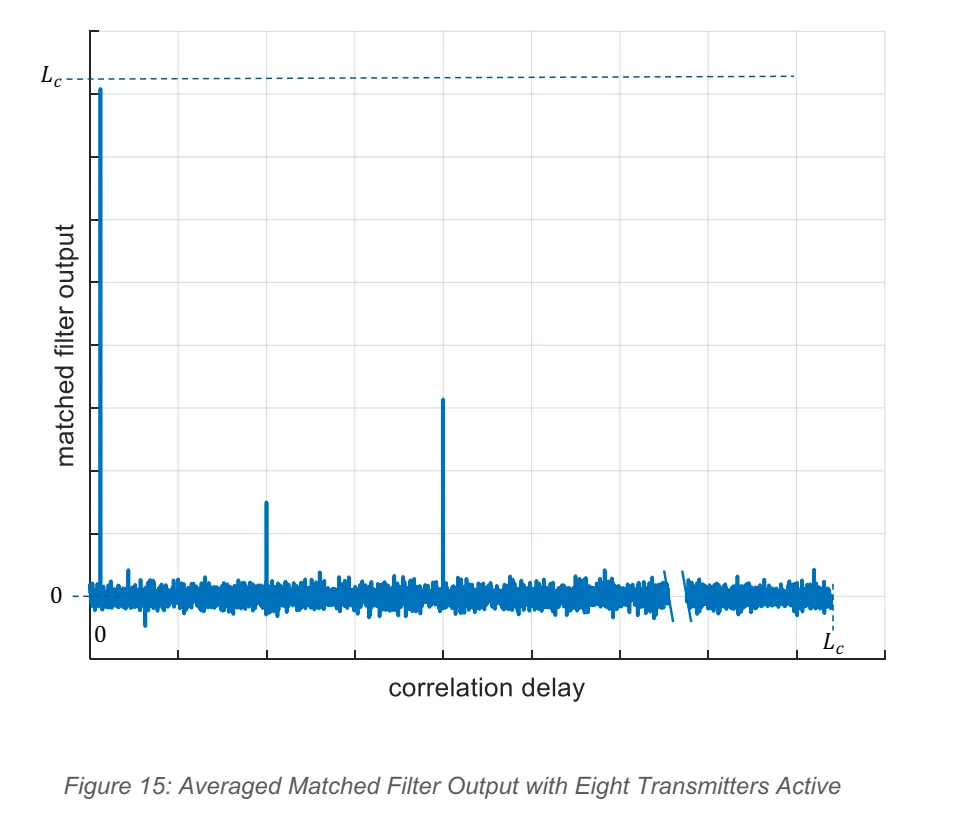
Figure 15: 示例为 8Tx 同时工作且各自使用不同码时的平均匹配滤波输出:相比单 Tx(三目标)情形,非峰值能量整体抬升,直观体现互相关泄漏;据此强调通过增大码长降低互相关可改善隔离度。
除此之外,原文还用“相位编码 FMCW(chirp 间 PRBS)”与 DCM 的对比说明:在同样扫描时长(如 5ms)下,DCM 能利用更高 chip 率获得更长序列,从而为更多 Tx 并发和更高隔离提供空间。
7. HCR(高对比度分辨率):从需求到“旁瓣结构决定弱目标生存空间”
文章提出 HCR 的动机是车载场景里强弱目标 RCS 差异巨大,且经常贴近:例如小孩在卡车前、行人贴近护栏等。HCR 衡量在给定 RCS 对比度下,目标在距离/角度/速度维度上最小可分离间隔。
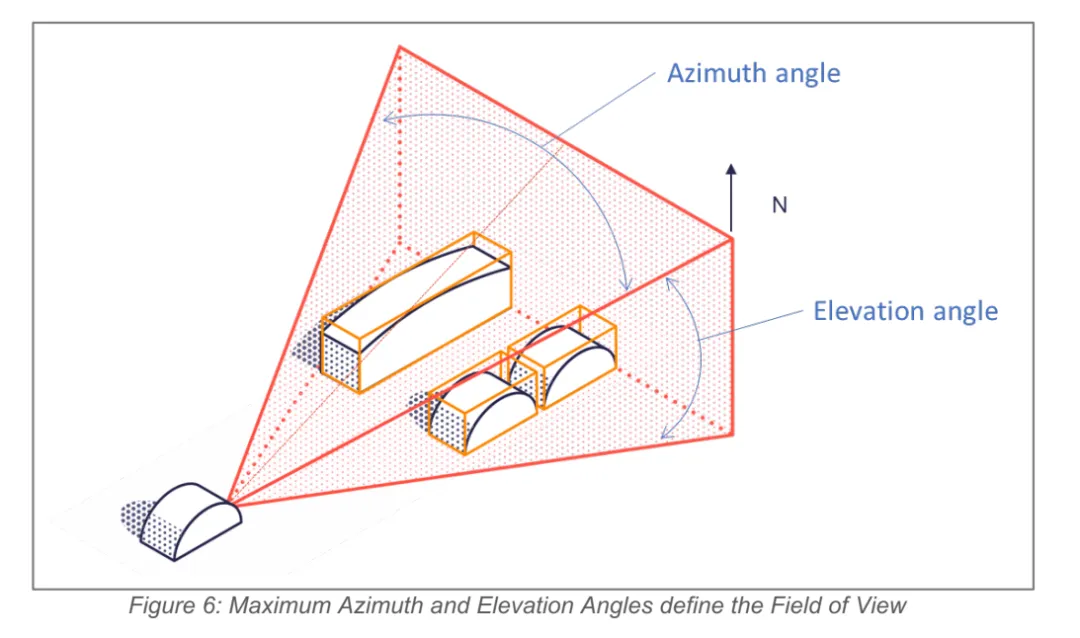
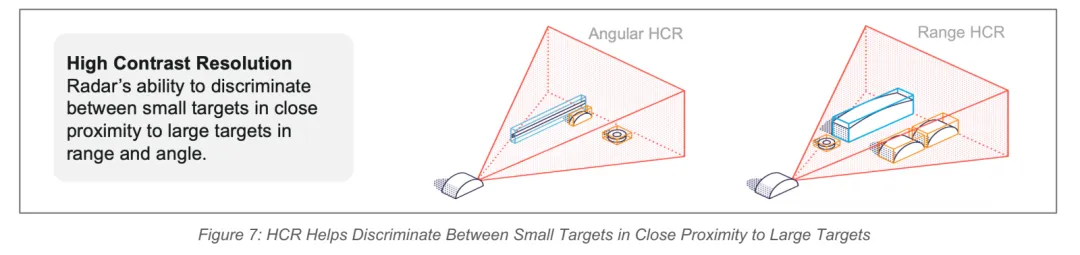
Figure 6 与 Figure 7: Figure 6 是雷达视场(FOV)示意;Figure 7 用小图强调:传统“分辨率”只看两个点能否分开,而 HCR 关心强目标旁边的弱目标是否会被强目标的泄漏(旁瓣/谱泄漏)压住。图上强目标的“扩散尾巴”覆盖弱目标时,即便名义分辨率足够,系统仍可能检测不到弱目标。
把 FMCW 与 DCM 放在同一框架下,文章实际上在暗示一种更“系统”的理解:分辨率 只是主瓣宽度的量级指标;真正影响 HCR 的是距离响应 在主瓣附近的衰减速度与旁瓣高度。DCM 由于相关输出更接近理想自相关主峰(thumbtack-like),因此更不容易出现强目标能量在距离维度大范围拖尾,从而 HCR 更好。
8. 干扰机理:INR 与 ISF()把“体制差异”变成可算指标
文章指出车载互干扰之所以麻烦,一个直接原因是 LOS 干扰只经历单程传播损耗,而目标回波经历双程损耗,因此干扰在受害雷达处往往天然更强。

Figure 16: 图中一辆车的雷达信号直接进入另一辆车的雷达接收机(LOS),同时受害雷达还要接收来自目标的反射回波。即“同一接收机里同时存在目标回波与外来雷达信号”,这会把干扰表现为噪声底抬升、虚警、漏检,甚至造成距离/速度假目标。
文章用 INR(interference-to-noise ratio)来量化“干扰相对噪声的强弱”,定义为
接着引入 ISF(interference susceptibility factor),记为 ,在 FMCW-to-FMCW 的讨论中把它定义成“下变频后干扰 PSD 与 RF 端干扰 PSD 的比例”,也可写为带宽比:
直观解释是:如果干扰经过下变频后被“压缩”到更窄的 ,它的 PSD 会升高,从而 INR 增大;相反,如果干扰仍保持宽带噪声样分布,PSD 不会被显著抬高。
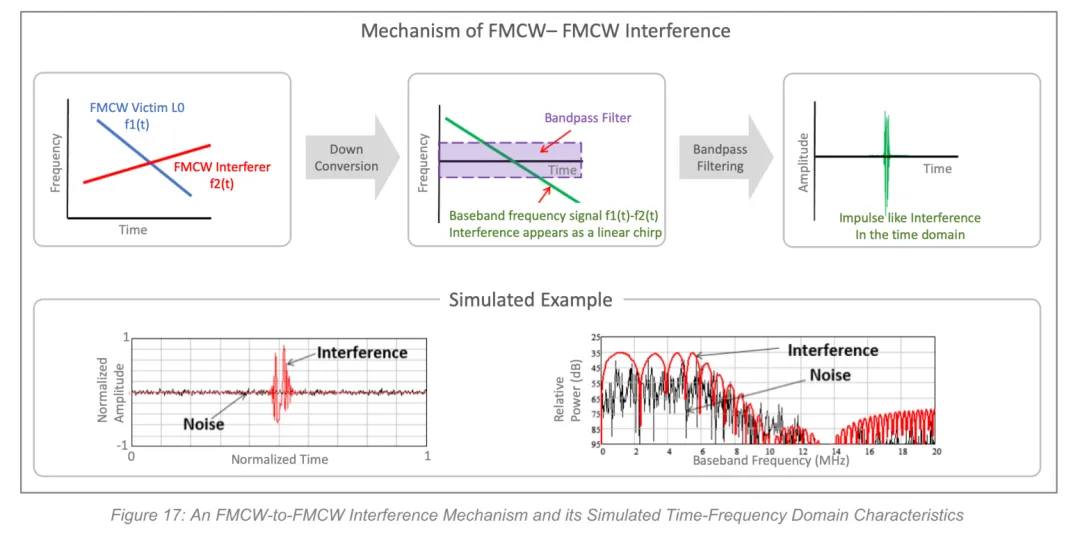
Figure 17: 图中展示两条 FMCW chirp 在时频平面相交时,受害雷达下变频后看到的干扰在其 IF/BB 通带内扫过;经过带通后,时域像一段短脉冲,频域表现为噪声底抬升。并且需要强调“干扰并不是整段时间都落在通带内,而是与两 chirp 的相对斜率有关”。
进一步指出:当两雷达斜率更相似时,交叉更慢,干扰持续时间变长,等效 变小,导致 变大、INR 更严重。
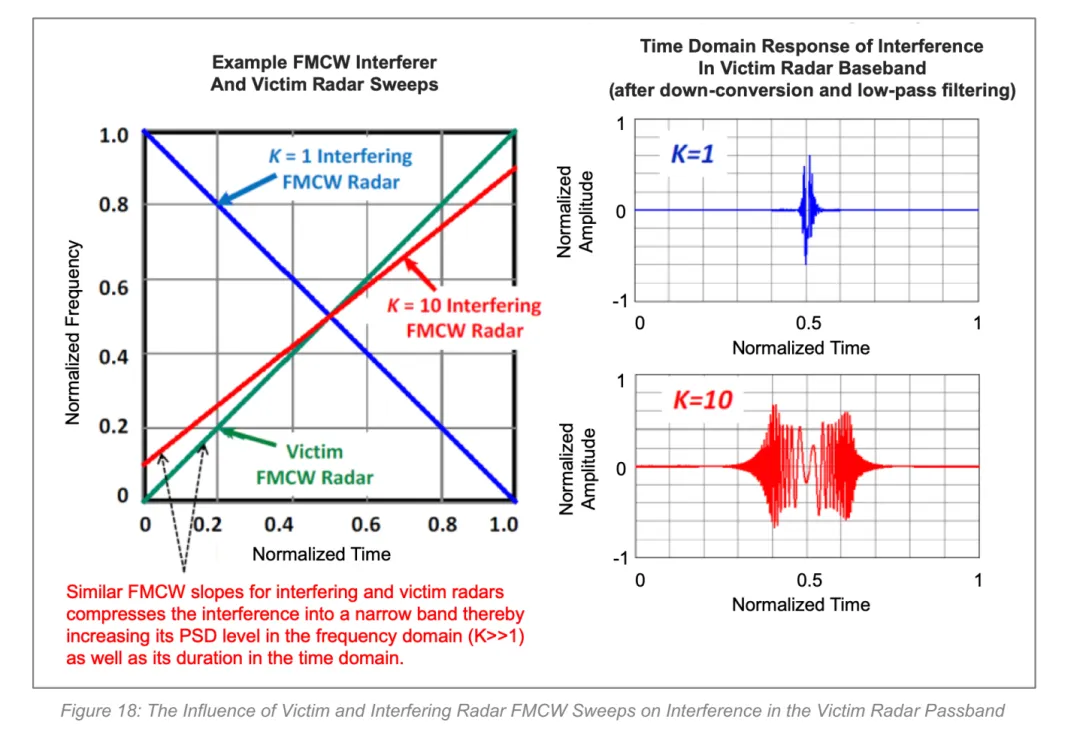
Figure 18: 给出 与 两种示意:当相对斜率使得交叉很快时,干扰在 BB 中更“分散”, 小;当交叉慢时,干扰能量集中度提升, 可达 10,意味着 PSD/INR 约放大 10 倍。而对于 DCM,原文指出只要涉及 DCM(DCM-to-DCM 或 DCM-to-FMCW/反向),干扰往往更像扩频噪声,通常 接近 1,因而干扰敏感度更低且更稳定;并指出 DCM↔FMCW 两种互扰在 INR 上对称。

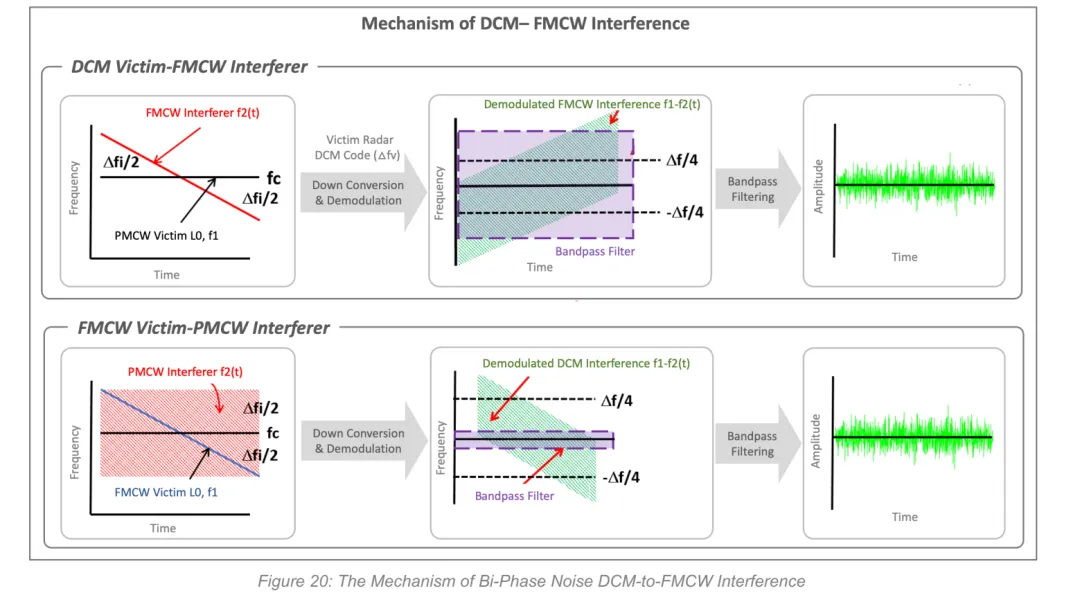
Figure 19 与 Figure 20: Figure 19 描绘 DCM-to-DCM:时频上更接近“随机噪声样能量铺展”,下变频后不会被强烈压窄;Figure 20 描绘 DCM-to-FMCW(以及反向):干扰在受害链路里仍更像宽带噪声,因而 更接近 1。结论是:FMCW↔FMCW 的 对几何与斜率高度敏感,而 DCM 相关情形更不敏感。
9. 工程落地:DCM 从“成本障碍”到“可上车”的技术条件
文章指出 DCM 的关键处理(匹配滤波/相关)主要在数字域完成,因此需要高速 ADC 与强数字算力,这曾经成本过高;而 CMOS 工艺与高速低功耗 ADC 的进步使“雷达射频 + 数字处理”单芯片集成成为可能。

Figure 21: 展示 CMOS DCM radar-on-chip 架构:前端采集高速数据后,通过专用加速器把原始数据做匹配滤波与降维,输出更接近“目标级信息”,再交给通用处理器完成跟踪与应用逻辑。图面想强调的是:DCM 的“数字重”并非不可行,而是依赖硬件加速把吞吐量问题解决。

附录:补全被省略的推导
A.1 FMCW 拍频 的推导(线性调频近似)
设发射为线性调频(上扫):
对应的瞬时相位(忽略常数项)为
发射信号(取复包络表示更清晰):
静止目标回波(仅延时):
与本振(取发射的共轭)混频:
展开平方项:
代回:
其中随时间 线性变化的相位项是 ,因此 是一个频率为 的复正弦(外加常数相位):
再用 得
这与正文中的直觉推导一致,也是文中“拍频与距离成正比”的数学根基。
A.2 距离分辨率 的 FFT 推导(从频率栅格到距离栅格)
对单个 chirp 的混频输出 ,理想情况下是若干个拍频分量之和:
对区间 做 点 FFT(采样率 ),其频率栅格间隔为
(当 时为严格等号)。当两目标拍频差小于一个栅格时,就难以分辨,因此取
而由拍频与距离关系 ,两目标距离差 产生的拍频差为
令 ,解得
这就是的距离分辨率。
A.3 DCM 匹配滤波输出为何是自相关:从离散码到“针尖主峰”
用离散 BPSK 码 表示 chip 序列,chip 波形为矩形脉冲 (宽度 ,幅度 1):
忽略载波并假设已下变频到基带,则回波为延时版本:
匹配滤波器(对 的匹配)为 ,输出为卷积:
令 ,则
也就是码的自相关函数在 处取主峰。若码设计使 在 时足够小(低旁瓣),则输出呈现“一个尖主峰 + 很低背景”,这就是文中所谓 thumbtack-like 的数学表达。
A.4 DCM 距离分辨率 的由来:相关主峰宽度与 chip 宽度同阶
对矩形 chip 波形 ,其自相关 是一个底宽为 的三角形;码序列的自相关主峰实际上是各 chip 自相关叠加的结果,因此主峰“有效宽度”与 同阶。于是若两目标时延差 ,两者主峰会显著重叠而难区分,取
这与原文给出的结果一致,并进一步用 得到 。
A.5 速度 FFT:为何 与总相干时间成反比
对某个距离单元,设第 次重复(间隔为 ,在原文语境中常取 )的匹配滤波输出为
这就是离散时间复指数,做 点 FFT 时可分辨的最小频差为
由 ,速度分辨率为
与原文一致。
A.6 ISF()为何可写成带宽比:从功率守恒到 PSD 变换
设 RF 端干扰在频域内近似均匀铺展在带宽 上,总功率为 ,则其 RF 端 PSD 近似为
经过受害雷达的下变频与滤波后,干扰能量被映射到基带的有效带宽 。在不考虑额外增益/损耗(或把其并入 )的前提下,总功率仍约为 ,因此基带 PSD 近似为
二者比值为
这就是原文给出的 ISF 表达式。
在 FMCW↔FMCW 中, 与两 chirp 的相对斜率(交叉快慢)有关:交叉越慢,干扰在通带内停留越久,等效 越小, 越大;原文用 与 的示意说明这一点。而涉及 DCM 时,干扰更接近扩频噪声样分布,通常不会被显著压窄,因此 往往接近 1,这也是原文强调 DCM 更抗互扰的核心之一。
B.1 FMCW:考虑多普勒后的“解调(dechirp)”基带信号推导
为避免三角函数干扰推导,使用复包络。设发射 chirp 的瞬时频率为
其相位为
发射复信号
对一个以径向速度 运动的点目标,回波除了往返延时 外,还会引入多普勒频移 。原文给出多普勒关系
常用近似模型是:回波为延时并叠加多普勒调制(把多普勒视为基带频移):
代入 :
dechirp(与本振 相乘):
整理括号内项:
因此
这表明基带(慢时间内)是一个频率为
的复指数(符号正负视具体混频定义而定,幅度与常相位无关距离估计)。若忽略多普勒或 ,就退化回静止目标 的常见结论。
把 代入得
这条式子的含义是:单次 chirp 的拍频同时包含距离项与速度项,因此会出现距离-速度耦合,工程上通常用多 chirp 形成二维 FFT(Range-Doppler)来分离。
B.2 FMCW:上下扫(up/down chirp)如何消除距离-速度耦合
如果再发一个下扫 chirp(斜率 ),则同样推导会得到
上扫拍频:
下扫拍频:
将两者线性组合:
距离项(由差得到):
因此距离估计为
速度项(由和得到):
因此速度估计为
这给出一种“单帧内靠上下扫解耦”的经典路径;若只用同斜率多 chirp,则改为二维 FFT 解耦(见下一节)。
B.3 FMCW:二维 FFT(Range-Doppler)与栅格分辨率公式
设一帧包含 个 chirp,每个 chirp 内采 个快时间样本。将 dechirp 后信号记为 ,其中 是 chirp 索引(慢时间), 是快时间采样点。对单目标,在理想离散模型下可写为
其中 与拍频有关, 与多普勒有关。对 做 点 FFT 得距离谱,对 做 点 FFT 得多普勒谱。
快时间频率分辨率(每个 chirp 内)为
由 得距离分辨率
与原文一致。
慢时间多普勒分辨率由总相干观测时间 ( 是 chirp 重复周期,常近似 或含空隙)决定:
速度分辨率因此为
这与 DCM 的结论结构完全同构:都是“速度分辨率 总相干时间的倒数”。原文给出了 DCM 形式 (其中 对应重复次数, 对应重复周期)。
B.4 FMCW:最大无歧义距离与采样率的更完整表达
对单 chirp,dechirp 后的拍频最大不应超过 Nyquist:
忽略多普勒项时 ,故
距离上限(无歧义)为
会发现这比原文的 少一个系数 2。差异来自“Nyquist 用 还是 以及带宽定义”习惯:有些推导把可用拍频带宽视为 或把实信号与复采样的等效带宽不同处理。原文给出
我们可理解为它取了更宽的“可用 IF 带宽”定义(或按实采样、双边谱折算)。 工程实践里你只要记住: 与 、 成正比,与 成反比,常数因子由实现细节决定。
B.5 DCM:离散匹配滤波的“处理增益(processing gain)”与输出 SNR
令长度为 的 BPSK 码为 。假设在某距离单元、某一次重复中,相关器输入采样(对齐到 chip 率)为
其中 为零均值白噪声,方差 。
匹配滤波(相关)输出取
代入 :
因为 ,
由于 只是 的符号翻转,噪声统计不变:
因此输出 SNR(幅度平方比)为
这给出典型的处理增益:
它解释了为什么 DCM 能在很低瞬时功率密度下通过长码相关把目标“拉出来”,同时也解释了为什么码长对 MIMO CDM 的隔离很关键:码越长,相关峰越尖、互相关泄漏相对越小(见后续)。原文在讨论多 Tx 码隔离时强调“主要靠更长码长提升通道隔离”。
B.6 DCM:周期码的距离歧义与“循环相关”形式
若发送的是周期重复码(周期 ),则接收的延时若超过一个周期,会“折回”到同一相关峰附近,从而出现距离歧义。原文给出最大无歧义距离
用离散形式可更清楚地看到:周期相关相当于循环相关
当回波延时对应的 chip 偏移为 ,相关输出将在 与所有 的等价类上重复出现,这正对应距离轴上每隔 周期性重复。
B.7 旁瓣、HCR 与模糊函数:为什么 DCM 更“拇指钉(thumbtack-like)”
原文用“thumbtack-like range response”来描述 DCM,并把它与更好的 HCR 关联。 这个说法在雷达理论里通常由 模糊函数(Ambiguity Function, AF) 精确刻画。对基带信号 ,AF 定义为
它表示:当匹配滤波器假设延时为 、多普勒为 时,对真实回波的响应强度。理想的“拇指钉”意味着:在 有一个尖峰,而离开原点后迅速衰减,旁瓣低且局部化。
1)相位编码(DCM/PSK)近似 AF 形态
把 视为载波乘码包络 (BPSK 时 )。在下变频后,AF 主要由 决定:
若 是伪随机码,其自相关在 时接近零(旁瓣接近噪声地板),并且由于相位随机化,多普勒维度的能量也不形成长条纹,从而 在二维上更像“点状主峰”。
2)FMCW 的 AF 为什么更容易形成耦合“条纹”
对 FMCW 的 ,代入 AF 定义会出现平方项导致的耦合,直观上会产生沿某些斜率方向拉长的能量脊线,这对应工程上常说的 range-Doppler coupling(需要二维处理去分离),也意味着强目标能量在某个维度更容易“拖尾”,从而压制近邻弱目标。
把“拖尾”与 HCR 联系起来,可以用一个抽象但很实用的检测条件来写:设距离响应(或二维响应在某切片上)为 ,强目标幅度为 ,弱目标幅度为 ,强目标旁瓣在弱目标位置的相对高度为 ,噪声标准差为 ,弱目标能被可靠检测的大致条件可写成
其中 与虚警概率门限有关。对同样的 ,若某体制让 更小、衰减更快,则在同样 下弱目标更容易满足不等式,这就是 HCR 的数学影子。
B.8 CDM MIMO:码间互相关泄漏功率与“通道隔离”近似
原文指出 DCM 天然支持 CDM MIMO:不同 Tx 用不同码,同时发射,靠相关分离;通道隔离主要靠码长提升。设 Tx 使用码 ,Tx 使用码 。在 Rx 端对 Tx 做匹配滤波(相关):
而接收信号包含多 Tx 叠加(忽略噪声与不同延时以突出码分离):
代入得
其中
是零延时互相关值(严格来说还应考虑非零延时互相关,但对同时对齐的码分离这是主要项)。
定义归一化互相关系数
则泄漏项为
如果码设计使 近似零均值、方差约为 (伪随机码常见量级),则单个干扰 Tx 的泄漏幅度的均方根(RMS)尺度约为
而主信号幅度是 ,因此“主峰与泄漏的幅度比”尺度大致为
这揭示了:在同功率同路径损耗下(),通道隔离的“典型尺度”随 提升;若看功率比则随 提升。这与原文“主要靠更长码长提升隔离”的叙述在数学上吻合。
B.9 FMCW↔FMCW 干扰: 与相对斜率差的近似关系(从几何到带宽比)
原文定义 ISF 为
并指出当两雷达斜率更相似时 会更大(例如可到 10)。
下面给出一个常用的一阶近似推导框架,说明为什么 会与“斜率差”相关。
设受害雷达(victim)发射/本振 chirp 的瞬时频率为
干扰雷达(interferer)发射 chirp 的瞬时频率为
忽略传播时延差(只关注相对斜率效应),干扰信号进入受害雷达并与 dechirp 后,得到的瞬时差频近似为
定义斜率差
则
受害雷达的基带/中频链路通常只允许 (或 的某种定义),也就是说干扰“落入通带”的时间区间满足
这是一个关于 的区间,其长度(干扰持续时间)近似为
从频域看,干扰在基带被“扫过”的频率跨度大致就是 ,但它的等效“谱集中程度”与持续时间有关:持续时间越长,频谱主瓣越窄,等效占用带宽越小。用时频不确定性做粗略估计,可取
于是带宽比形式的 变为
这给出一个与原文叙述一致的方向性结论:当两雷达斜率越接近( 越小),则 越小, 越大,干扰 PSD 越高,INR 越糟。原文用图示对比 与 来表达这种敏感性。同时,这也解释了为什么涉及 DCM 时往往 :扩频相位码使干扰在解调后更像宽带噪声,不容易被“扫过通带的几何关系”压缩成窄带集中能量。原文明确指出 DCM 情形通常 接近 1。
B.10 INR 与检测门限:把 、噪声底抬升与虚警/漏检连起来
原文用
刻画干扰相对噪声的程度。 若系统噪声(热噪声+接收机噪声)等效 PSD 为 ,干扰等效 PSD 为 ,则
在功率域,对某个处理带宽 (例如 FFT 一个 bin 的等效带宽或匹配滤波输出的噪声等效带宽),噪声功率与干扰功率为
因此总背景功率
若检测器采用恒虚警率(CFAR)思想,门限通常与背景功率成比例,即
这意味着 INR 上升会抬高门限,导致弱目标更难超过门限而漏检;反过来若门限不变则虚警会上升。把 ISF 写入 INR:若 RF 端干扰 PSD 为 ,基带 PSD 为 ,则
因此在 FMCW↔FMCW 中,当 因斜率接近而变大时,检测性能会以近似线性的方式恶化,这正是原文引入 的工程动机。
B.11 把“距离分辨率相同但 HCR 不同”写成可计算的旁瓣指标
原文强调 HCR 是车载更关心的指标:强弱目标相邻时能否分开。 用一维距离响应来刻画,设系统对点目标的归一化脉冲响应为 (距离 bin 的离散响应),强目标在 bin ,弱目标在 。则强目标在弱目标位置贡献幅度为 。弱目标可检测的粗条件可写为
把对比度定义为
则需要满足
当 很大时,主导项是 ,即旁瓣/泄漏高度。因此对固定对比度 ,HCR 的“最小可分距离”本质上是解下面的不等式得到的最小 :
如果 DCM 的 衰减更快、更低旁瓣(接近理想自相关),则满足不等式的最小 更小,于是 HCR 更好;这与原文“thumbtack-like range response → better HCR”的论断一致。