



导语
围绕战略性产业集群,广州奥凯信息咨询有限公司利用智能撮合技术,将持续开展科技成果项目推介,助力科技成果转化工作深入园区、企业,为技术供需双方提供技术转移转化服务,加快科技成果向现实生产力转化。
高端装备制造产业
一种针对柔性弦线的干扰拒绝控制方法
公开号:CN108287475B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及自动控制技术领域,尤其涉及一种针对柔性弦线的干扰拒绝控制方法。
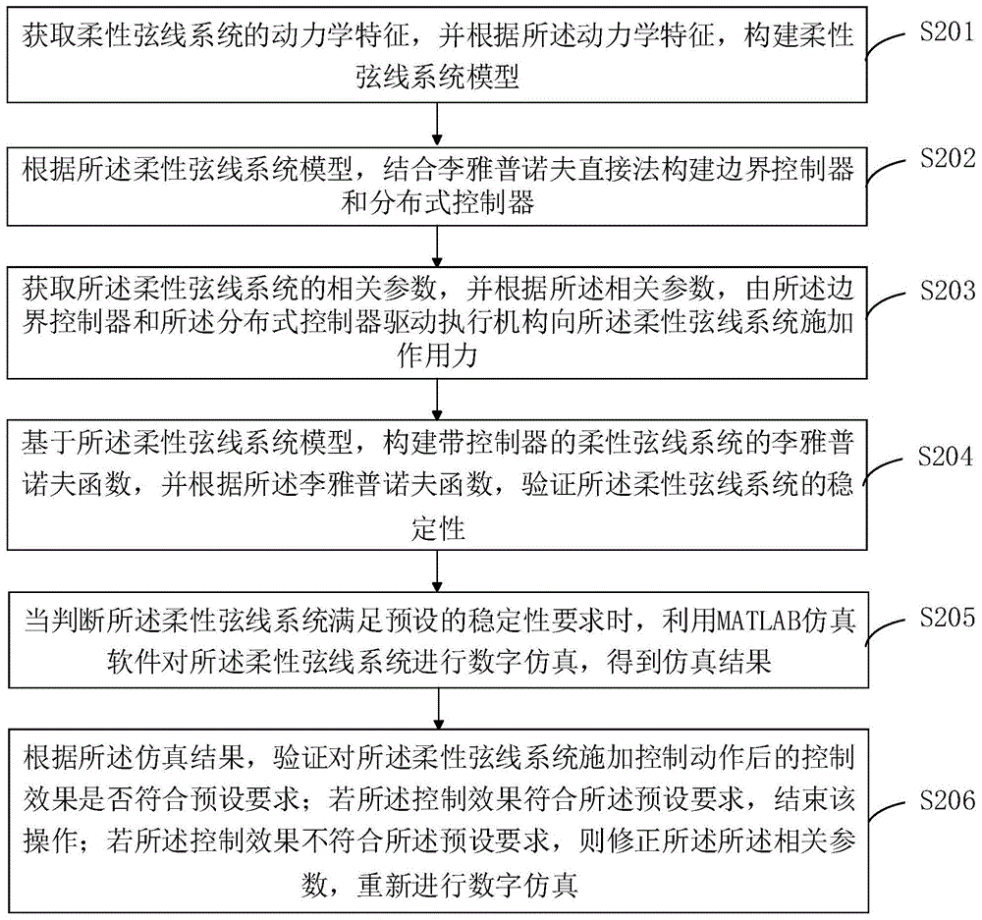
专利简介:本发明公开了一种针对柔性弦线的干扰拒绝控制方法,包括:获取柔性弦线系统的动力学特征,并根据所述动力学特征,构建柔性弦线系统模型;构建边界扰动和无限维扰动观测器用以减弱外部扰动影响;根据所述柔性弦线系统模型,结合李雅普诺夫方法构建边界控制器和分布式控制器;对带有边界控制和分布式控制的柔性弦线系统进行稳定性分析和数字仿真,根据仿真结果来调节系统的设计参数,达到良好的控制性能。本发明能够有效抑制边界扰动和无限维扰动,使得柔性弦线系统工作更加稳定。
一种针对柔性Timoshenko梁机械臂抗饱和的边界控制方法
公开号:CN108181836B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及自动控制技术领域,尤其涉及一种针对柔性Timoshenko梁机械臂抗饱和的边界控制方法。
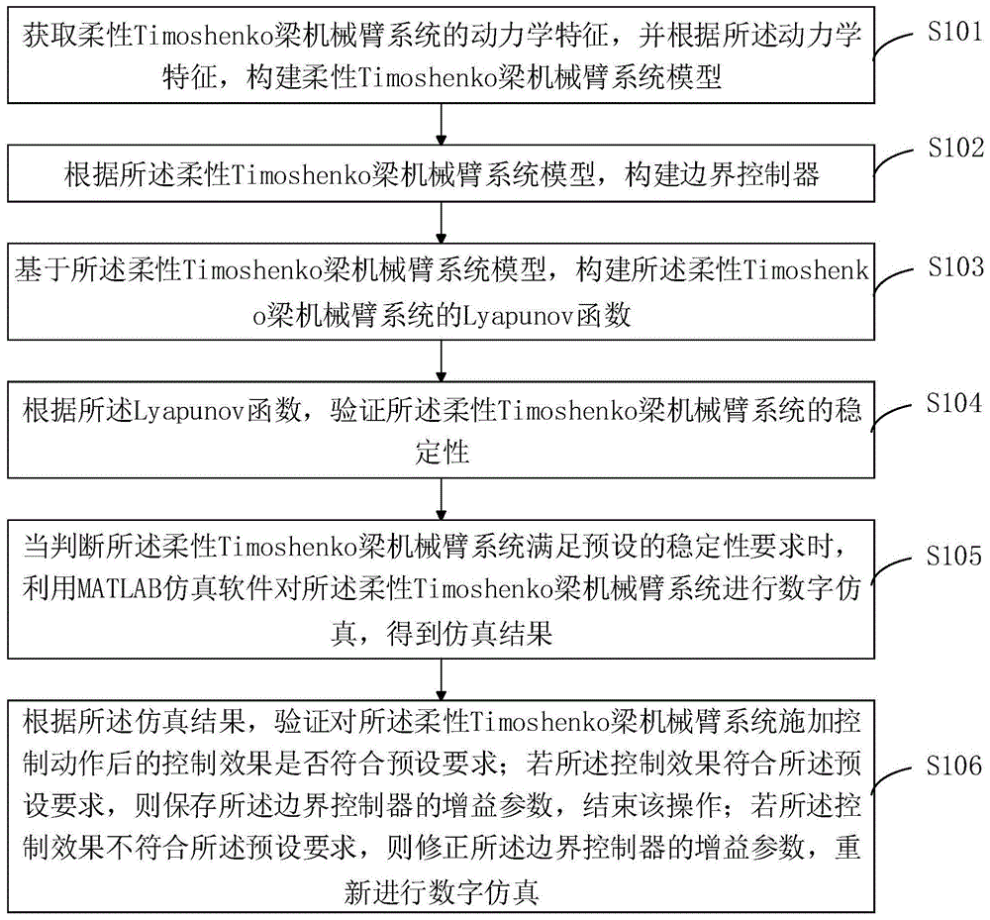
专利简介:本发明公开了一种针对柔性Timoshenko梁机械臂抗饱和的边界控制方法,包括:获取柔性Timoshenko梁机械臂系统的动力学特征,并根据所述动力学特征,构建柔性Timoshenko梁机械臂系统模型;根据所述柔性Timoshenko梁机械臂系统模型,构建边界控制器;在抗饱和控制作用下验证所述柔性Timoshenko梁机械臂系统的稳定性;利用MATLAB仿真软件对所述柔性Timoshenko梁机械臂系统进行数字仿真,得到仿真结果;根据所述仿真结果,验证对所述柔性Timoshenko梁机械臂系统施加控制动作后的控制效果是否符合预设要求;若所述控制效果不符合所述预设要求,则根据所述仿真结果调节所述边界控制器的增益参数,使之具有较好的抗饱和控制及跟踪性能。本发明能够实现对机械臂更稳定、精确的跟踪及控制。
基于单片机控制的电磁式软体运动机器人及其控制方法
公开号:CN109531540B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及机器人技术领域,特别是涉及一种基于单片机控制的电磁式软体运动机器人及其控制方法。
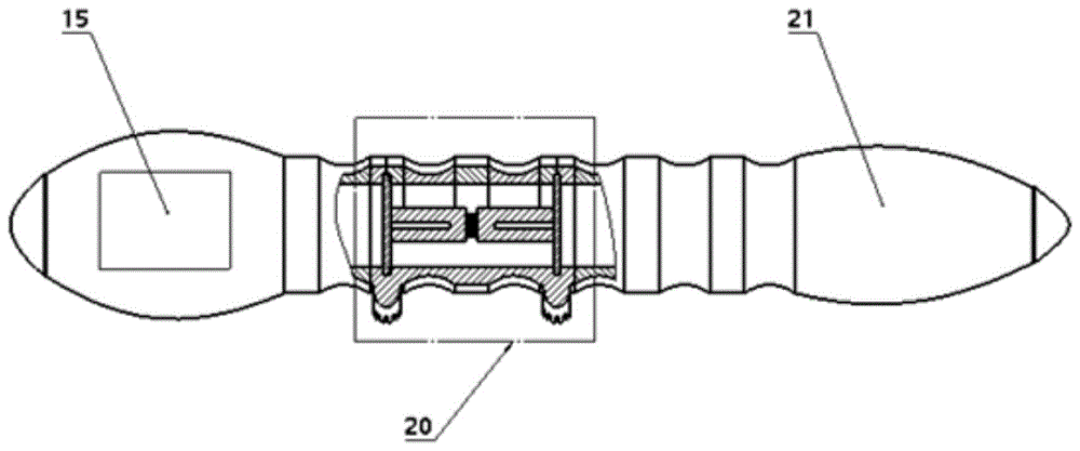
专利简介:本发明公开了一种基于单片机控制的电磁式软体运动机器人及其控制方法,所述机器人包括:主体结构,所述主体结构的底部设有行走模块,其内部设有控制驱动系统以及电磁铁致动系统,所述控制驱动系统通过无线模块获取远程操控设备的控制信号,根据该控制信号使电磁铁致动系统产生磁场,从而驱动所述行走模块进行相应的运动,本发明可在无尾化的基础上实现远程操控的目的。
一种具有非线性输入的柔性弦线系统的振动控制方法
公开号:CN108388136B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及自动控制技术领域,尤其涉及一种具有非线性输入的柔性弦线系统的振动控制方法。
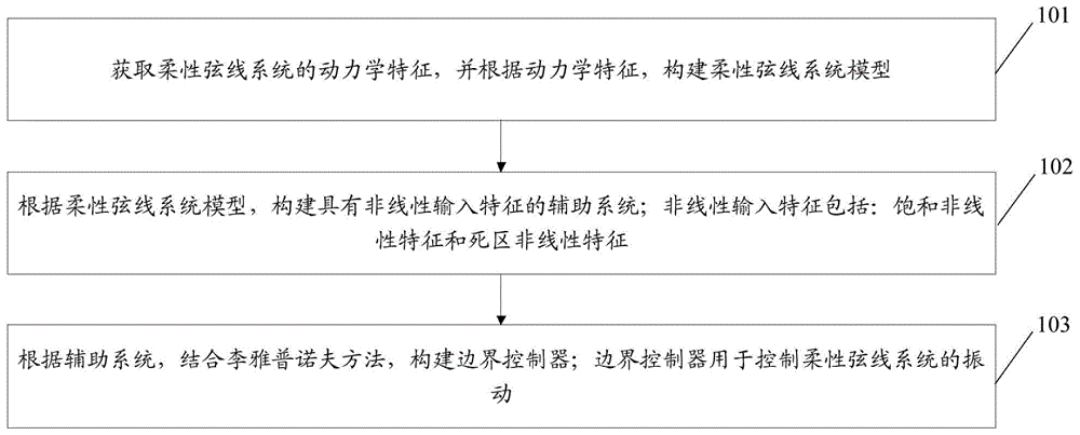
专利简介:本发明公开了一种具有非线性输入的柔性弦线系统的振动控制方法,获取柔性弦线系统的动力学特征,并根据动力学特征,构建柔性弦线系统模型;再根据柔性弦线系统模型,构建具有非线性输入特征的辅助系统;最后,根据辅助系统,结合李雅普诺夫方法,构建边界控制器;边界控制器用于控制柔性弦线系统的振动。本发明技术方案综合考虑了饱和非线性特征和死区非线性特征对柔性弦线系统的影响,能够有效抑制弦线振动并能消除非线性输入的影响,使得柔性弦线系统工作更加稳定。
一种针对柔性立管振动控制的方法及装置
公开号:CN109933102B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及自动控制技术领域,尤其涉及一种针对柔性立管振动控制的方法及装置。
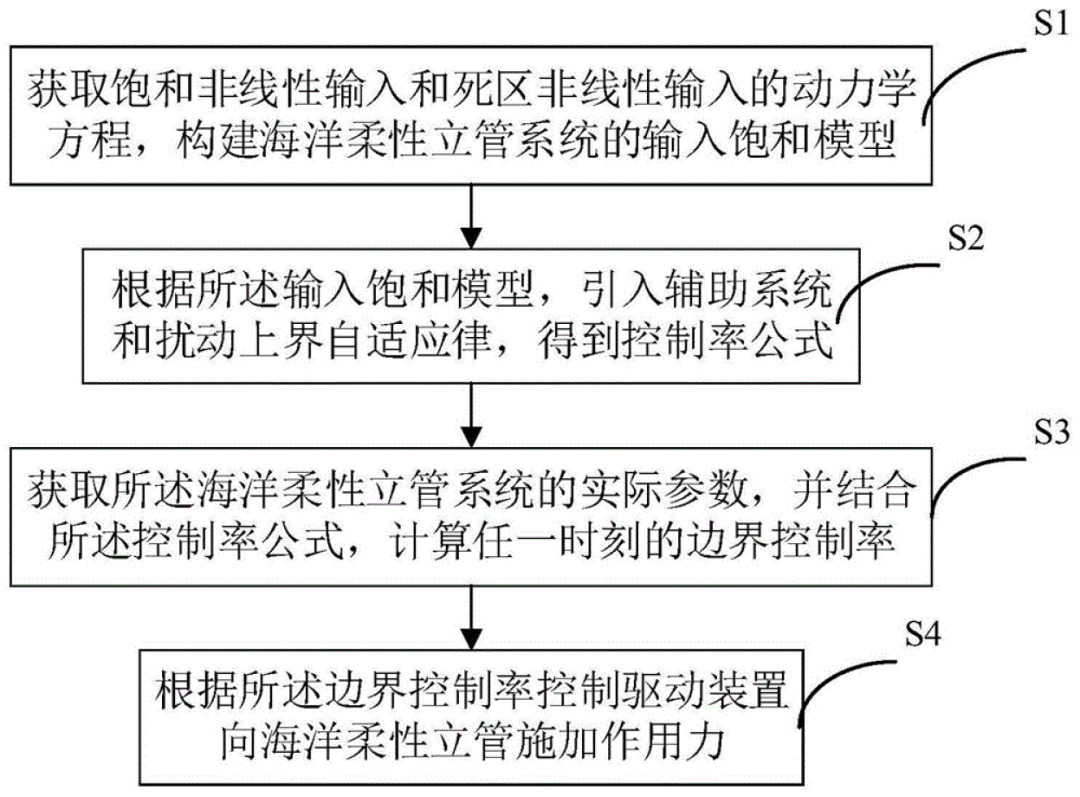
专利简介:本发明公开了一种针对柔性立管振动控制的方法及装置。其中,所述方法包括:获取饱和非线性输入和死区非线性输入的动力学方程,构建海洋柔性立管系统的输入饱和模型;根据所述输入饱和模型,引入辅助系统和扰动上界自适应律,得到控制率公式;获取所述海洋柔性立管系统的实际参数,并结合所述控制率公式,计算任一时刻的边界控制率;根据所述边界控制率控制驱动装置向海洋柔性立管施加作用力。本发明能够降低甚至消除混和非线性输入对海洋柔性立管系统控制性能的影响,通过提高抑制振动的控制精度和灵敏度,提高系统的稳定性。
一种基于kinect视觉的AGV导航方法
公开号:CN108534788B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及一种AGV导航方法,特别涉及一种基于kinect视觉的AGV导航方法。
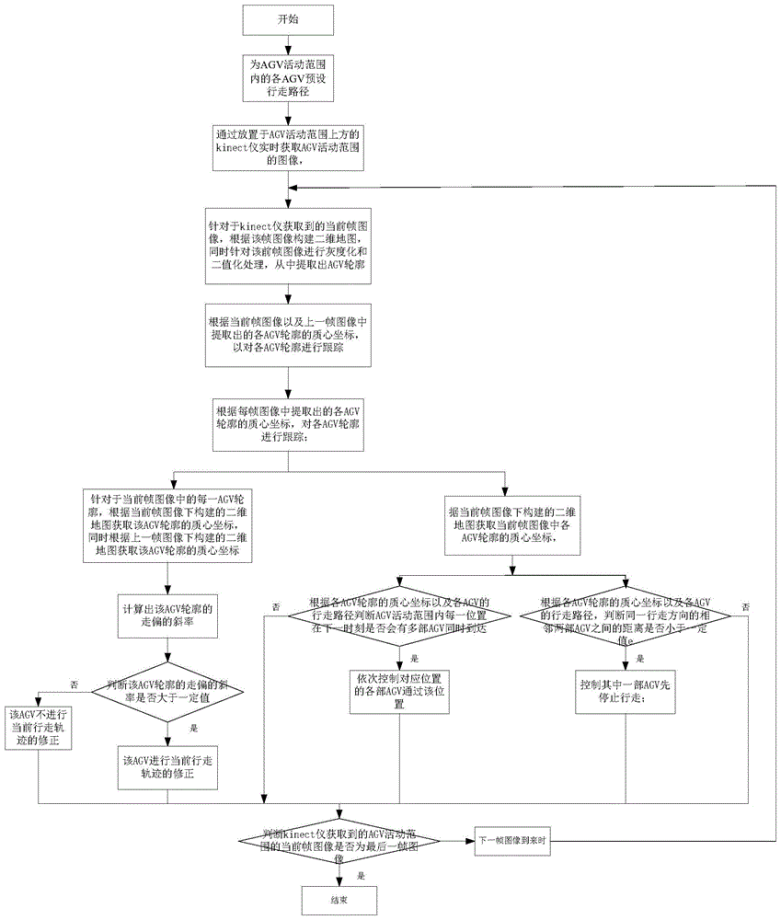
专利简介:本发明公开了一种基于kinect视觉的AGV导航方法,为各AGV预设行走路径;当AGV活动范围上方的kinect仪实时获取图像,并且构建出二维地图;通过每帧图像的AGV轮廓对各AGV进行追踪。每当获取到当前帧图像时,通过当前帧图像和上一帧图像计算出各AGV轮廓走偏的斜率,确定是否要对AGV的当前行走轨迹进行修正;每当获取到当前帧图像时,通过计算相同行走方向的相邻两部AGV之间距离确定是否要控制AGV的行走,同时通过判断AGV活动范围内每一位置在下一时刻是否会有多部AGV同时到达控制各AGV的行走;本发明方法通过Kinect视觉进行全局定位,能够进行合理有效的智能避障。
光谱共焦位移传感器定位装置及定位方法
公开号:CN108775863B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及视觉测量领域,尤其涉及一种光谱共焦位移传感器定位装置及定位方法。
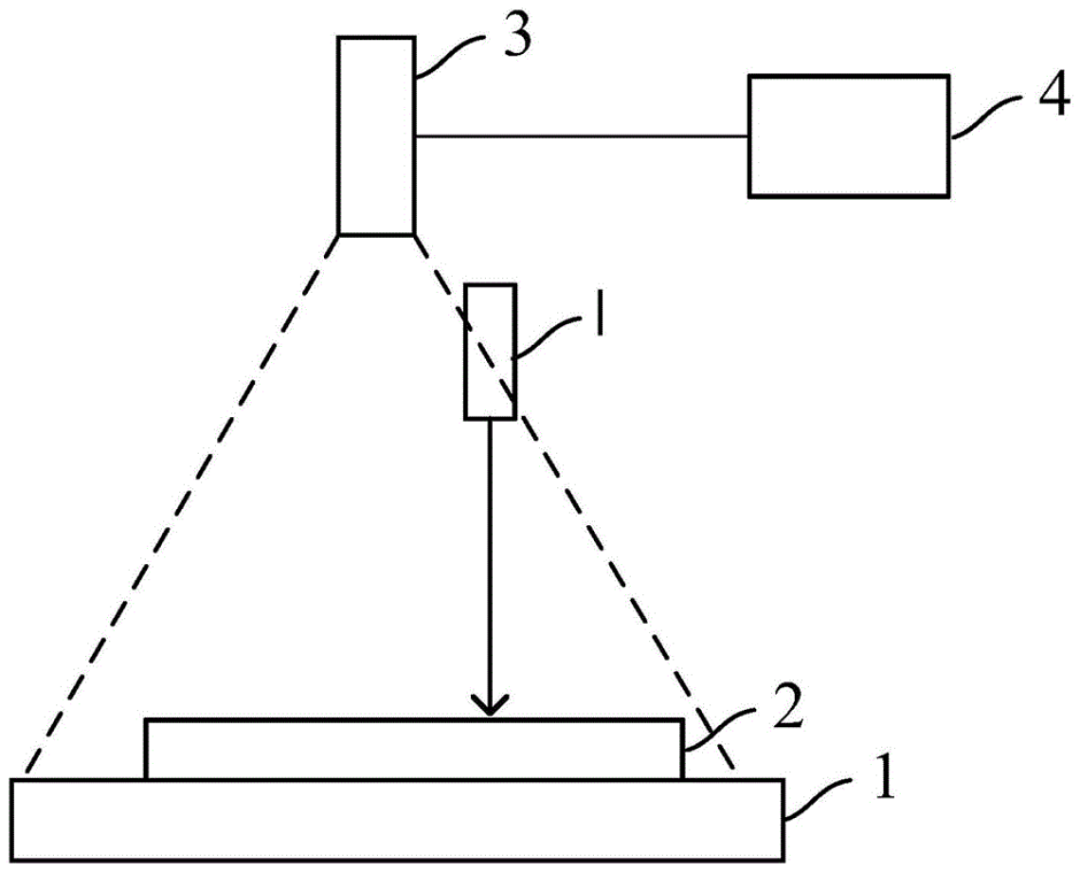
专利简介:本发明公开了一种光谱共焦位移传感器定位装置及定位方法,所述定位装置包括:载物台、标定板、相机和处理器;所述标定板设置在载物台上,所述相机设置在所述标定板的上方,所述相机与所述处理器电连接,所述相机用于对投射了光斑的标定板进行拍摄,所述处理器用于对拍摄的图像进行处理以获取所述光谱共焦位移传感器的检测点在所述图像上的位置。采用本发明可以对所述光谱共焦位移传感器的检测点进行准确定位,以便将需要检测物体移动到该检测点上进行高度或厚度检测。
一种可自动调节高度的货架及货物存储装置
公开号:CN109393763B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及货物摆放设备,具体涉及一种可自动调节高度的货架及货物存储装置。
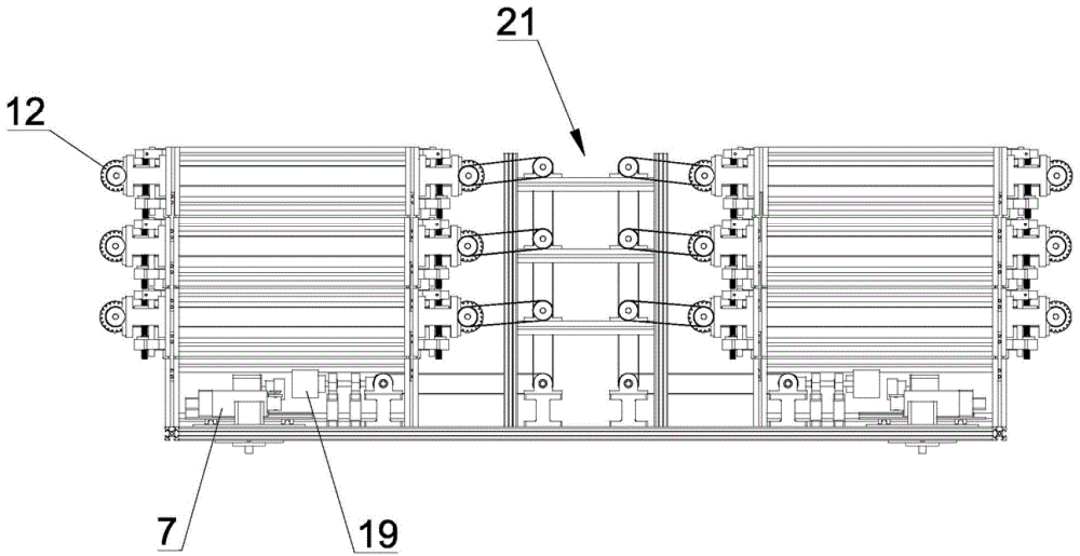
专利简介:本发明公开一种可自动调节高度的货架及货物存储装置,包括若干组竖向搭接的承载单元以及动力单元;其中,所述承载单元包括起到支撑和连接作用的固定架以及用于承载货物的移动架;所述动力单元包括一个提供动力的动力机构和若干个将动力传递至移动架上的传动机构,所述传动机构的数量等于承载单元的数量;所述动力机构包括动力源和用于驱动动力源与传动机构连接的动力匹配机构。所述货物存储装置包括两组货架和设置在两组货架之间的传动安装架。该货架和货物存储装置能够自动进行高度调节,解放人力,且能够调节到任意的高度,提高空间的存储效益。
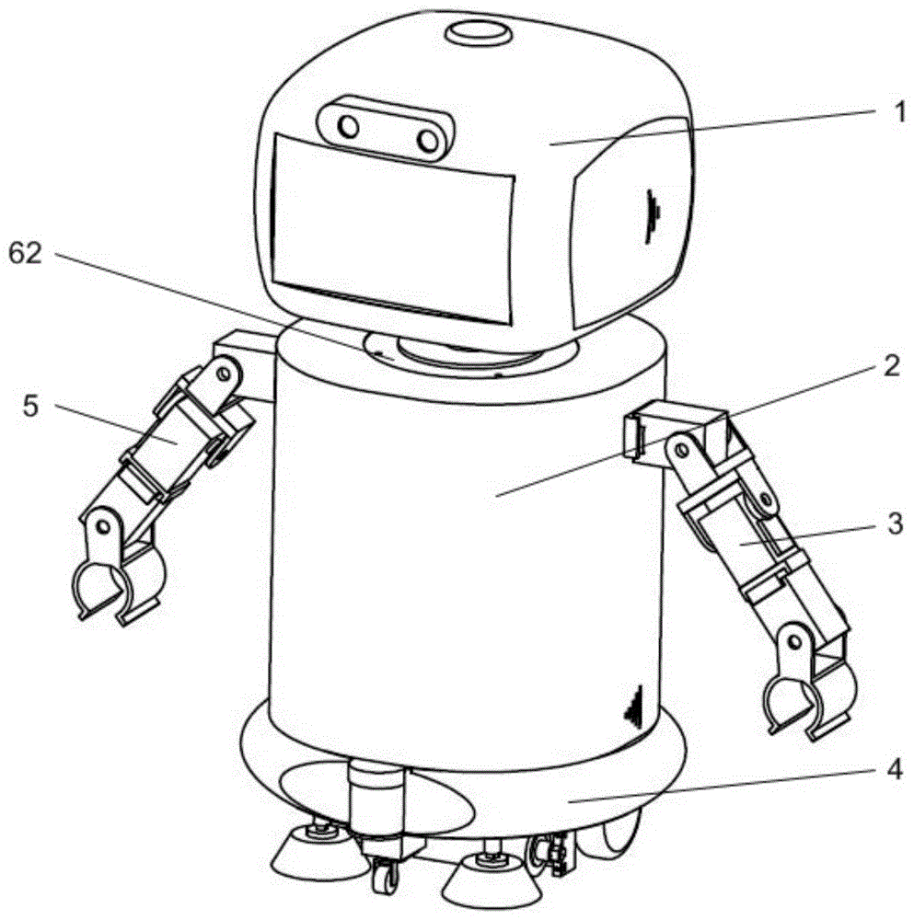
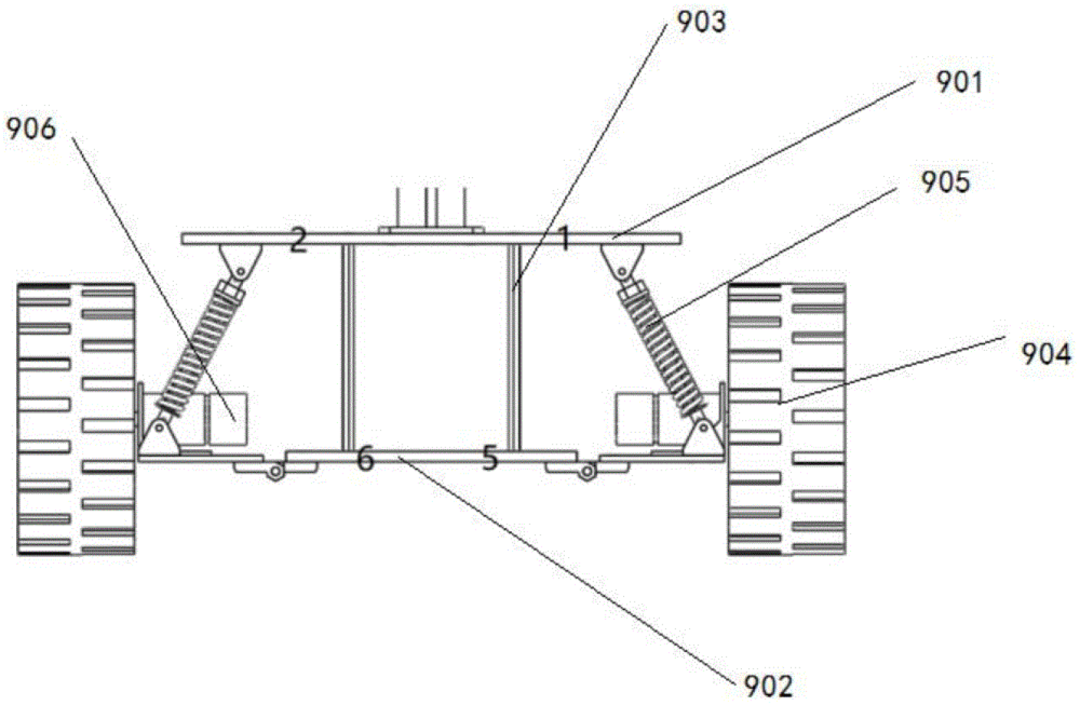
一种基于ROS的家庭服务机器人
公开号:CN109822582B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及机器人领域,具体涉及一种基于ROS的家庭服务机器人。
专利简介:本发明公开了一种基于ROS的家庭服务机器人,该机器人包括清洁移动平台,躯干,三自由度双臂和二自由度头部,清洁移动平台上装有操作系统为ROS的Linux主机、激光雷达、惯性测量单元、行走组件和清洁组件,二自由度头部包括显示屏、深度相机、麦克风模块和触觉传感器。该机器人通过激光雷达对未知环境构建三维地图,利用ROS的轨迹规划库,在环境中按照要求进行清洁轨迹规划与优化,躲避动、静态障碍;通过头部的显示屏、深度相机和麦克风模块进行人机交互,深度相机获取人的肢体动作信息,头部的触觉传感器能感知是否有人触碰,三自由度双臂能实现类似人类双臂前后上下摆动,能满足家庭娱乐需求,提高了该机器人的智能性与多功能性。
一种导盲装置
公开号:CN211132021U
专利类型:实用新型
申请人:广州大学
法律状态:有效
技术领域:本实用新型涉及机器人导盲技术领域,特别涉及一种导盲装置。
专利简介:本实用新型公开了一种导盲装置,所述导盲装置包括承载移动部分和牵引部分;所述导盲装置承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲装置前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲装置转弯行驶。本实用新型可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并引导盲人,机械结构简单高效。同时可通过设置多套舵机和超声波扫描仪,提升检测精度。
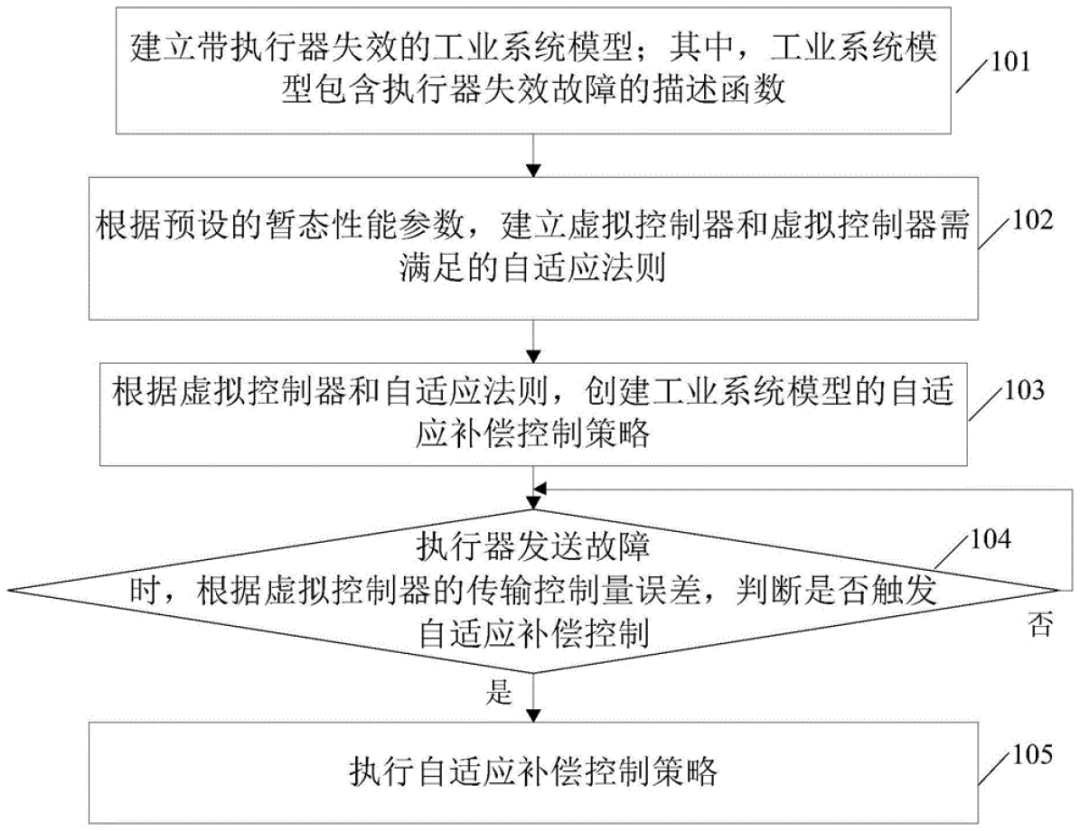
一种基于带宽节省的模糊自适应执行器失效补偿控制方法
公开号:CN107390529B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及机器人技术领域,尤其涉及一种基于带宽节省的模糊自适应执行器失效补偿控制方法。
专利简介:本发明公开了一种基于带宽节省的模糊自适应执行器失效补偿控制方法,该方法包括:建立带执行器失效的工业系统模型,根据预设的暂态性能参数,建立虚拟控制器和所述虚拟控制器需满足的自适应法则,再创建工业系统模型的自适应补偿控制策略,当执行器发送故障时,根据虚拟控制器的传输控制量误差,判断是否触发自适应补偿控制,如果是,执行自适应补偿控制策略;否则,返回判断。采用本发明实施例,在不确定随机非线性系统的事件触发执行器失效时,既节省网络通讯的带宽,又保证了系统的暂态性能。
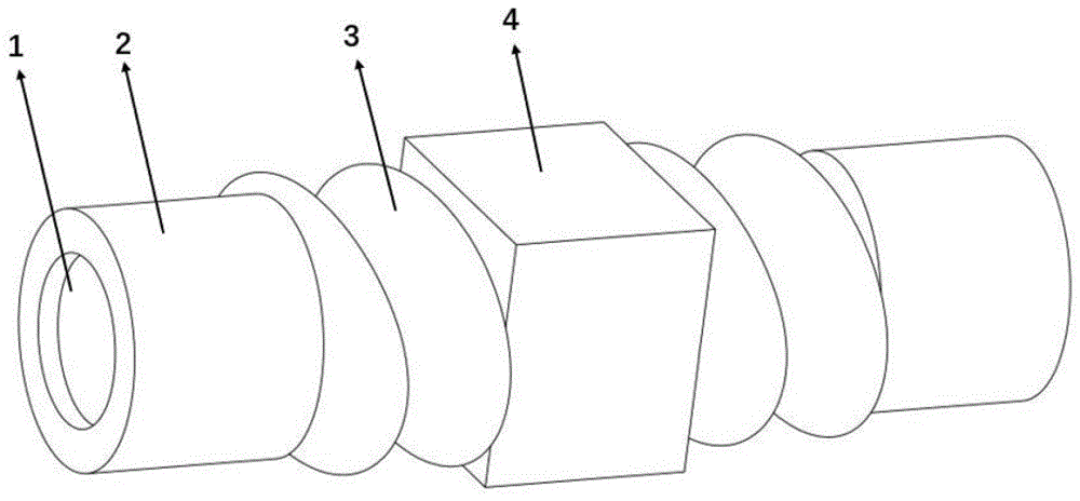
基于铁磁流体驱动的软体机器人、模具模型及其制备方法
公开号:CN108972510B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及机器人领域,具体涉及一种基于铁磁流体驱动的软体机器人及其制备方法。
专利简介:本发明公开了一种基于铁磁流体驱动的软体机器人、模具模型及其制备方法。其软体机器人包括弹性体主体,其弹性体主体包括电磁铁容纳部、环节结构以及磁流体库,其电磁铁容纳部位于位于其弹性体主体的左右两端,其环节结构包括多个环节结构单体,其环节结构单体位于所述电磁铁容纳部以及其磁流体库之间。本发明实现了将磁场内置于基于铁磁流体的软体机器人中,使得机器人不受外置磁场要求的限制。并且该软体机器人通过其特定结构,巧妙的将磁流体与软体机器人联合,体积小、驱动简单、灵活性强,能适应多种环境。
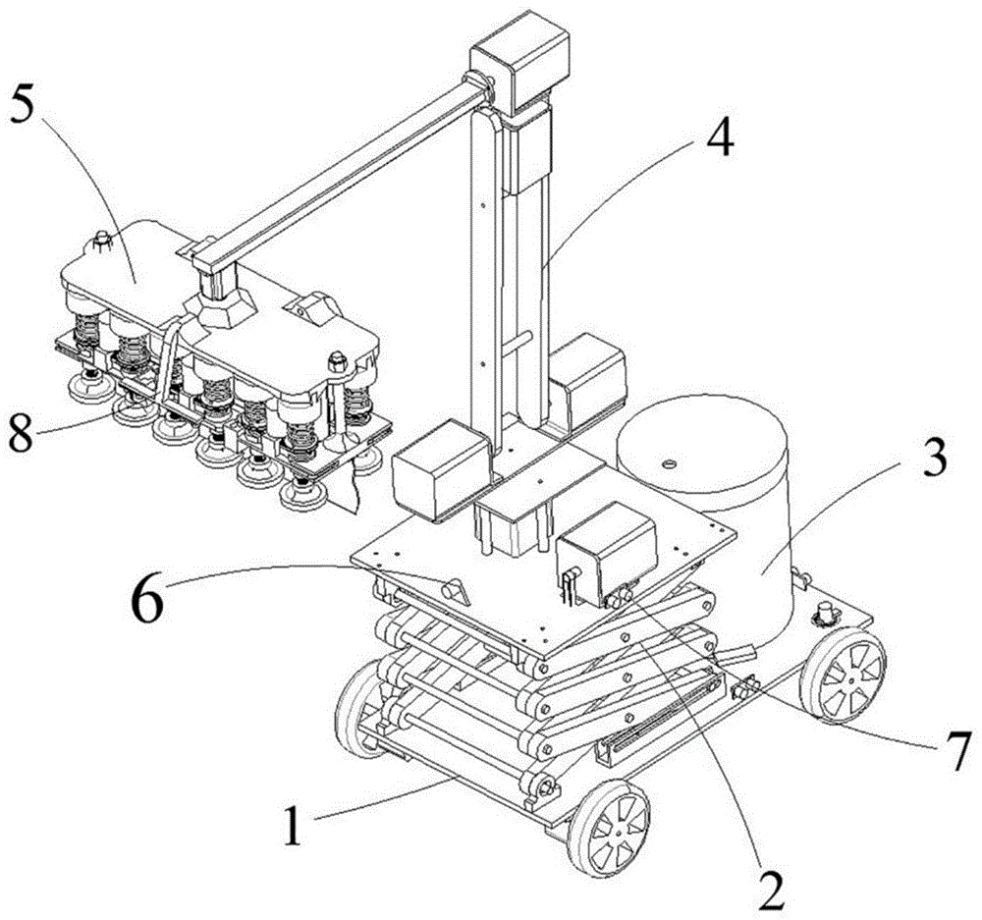
一种洗车机器人
公开号:CN110216690B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及洗车设备技术领域,尤其涉及一种洗车机器人。
专利简介:本发明涉及洗车设备技术领域,尤其涉及一种洗车机器人。洗车机器人包括行走底盘、设置在行走底盘上方的升降平台、设置在升降平台上的机械手以及设置在机械手操作端的洗刷组件,还包括图像采集装置、距离监测装置以及控制装置。通过采用本发明的洗车机器人,实现了洗车作业的自动化,降低了洗车作业的劳动强度,此外,本发明的洗车机器人在清洗作业前能够对待洗车的尺寸大小进行分析并规划出洗刷组件的运行轨迹,这样一方面提高了洗车机器人的清洗效率,另一方面缩短了清洗过程中洗刷组件的整体运行轨迹长度,从而降低了对水的消耗。
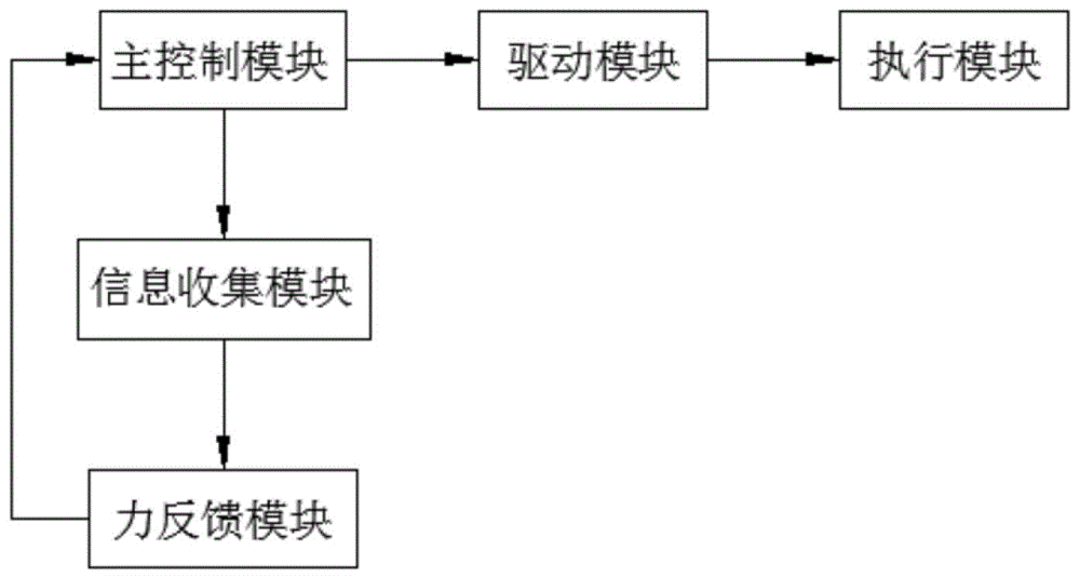
一种柔性打磨控制系统的控制方法
公开号:CN108637905B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及机器人控制技术领域,更具体地说,涉及一种柔性打磨控制系统的控制方法。
专利简介:本发明公开了一种柔性打磨控制系统及方法,所述柔性打磨控制系统包括设置在机器人上的主控制模块、驱动模块、执行模块、信息收集模块和力反馈模块,所述主控制模块分别连接所述驱动模块和信息收集模块,所述信息收集模块连接所述力反馈模块,所述驱动模块连接所述执行模块,所述力反馈模块连接所述主控制模块,所述主控制模块根据所述力反馈模块反馈的信号控制所述驱动模块调整所述执行模块打磨。本发明提供的柔性打磨控制系统提高了打磨头对工件的表面复杂形状及产品快速换线的适应性,提高了打磨质量和打磨效率。本发明结构简单,使用效果好,易于推广使用。
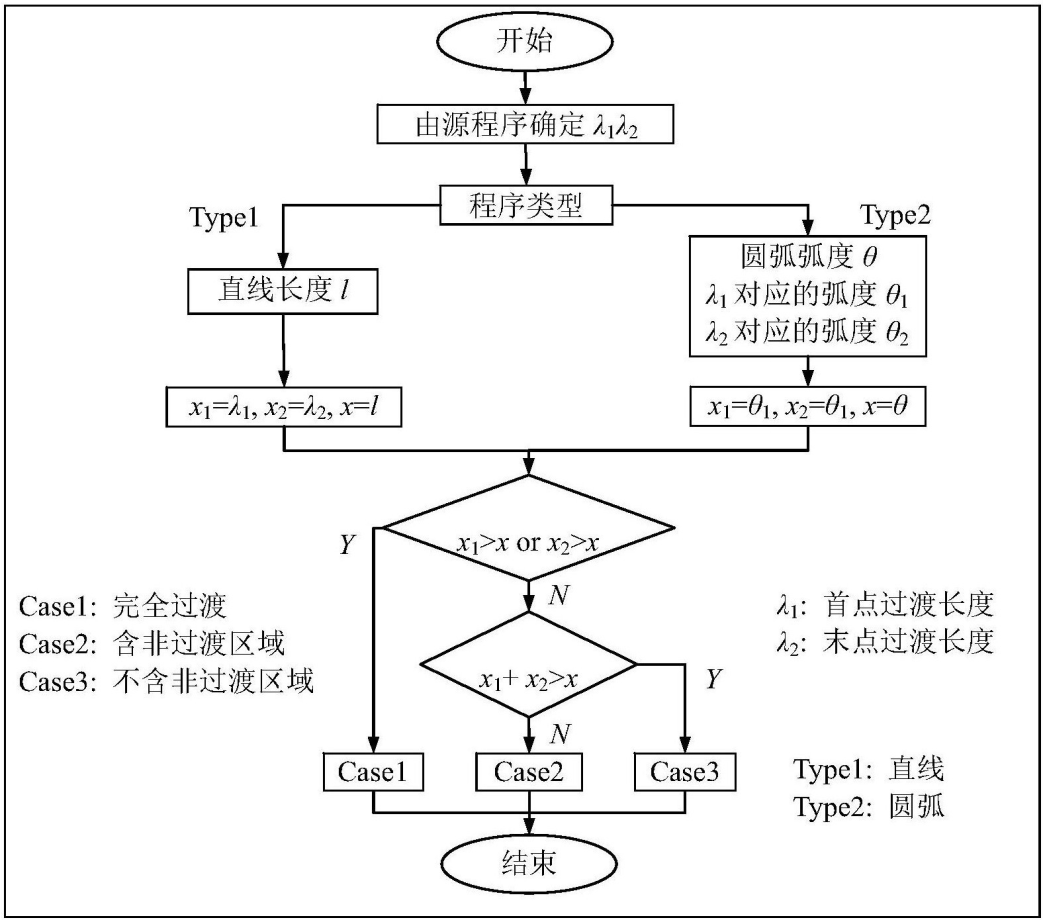
一种机器人笛卡尔空间平滑轨迹的规划方法
公开号:CN107030697B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及具有空间运动特征的机器人技术领域,尤其涉及一种机器人笛卡尔空间平滑轨迹的规划方法。
专利简介:本发明公开了一种机器人笛卡尔空间平滑轨迹的规划方法,其过程如下:对空间直线、圆弧等单段轨迹的位置和姿态进行规划;对路经进行过渡平滑规划,采用过渡等级控制路经过渡区域的大小,在过渡区域内的路经采用抛物线进行拟合,姿态采用四元数法进行拟合;采用含加速度、加加速度约束的摆线加减速规划方法对空间路径轨迹进行规划,得到平滑的机器人空间位姿轨迹。该方法能够有效解决机器人轨迹停顿、不流畅、抖动、偏离路径、超速等问题,提升机器人运动的平稳性。本发明所涉及的平滑轨迹规划方法具有一定的柔性,既能规划笛卡尔空间的位姿,又能够适用于多种机器人构型,包含常见的6自由度垂直关节机械臂、少自由度机器人及冗余度机器人。
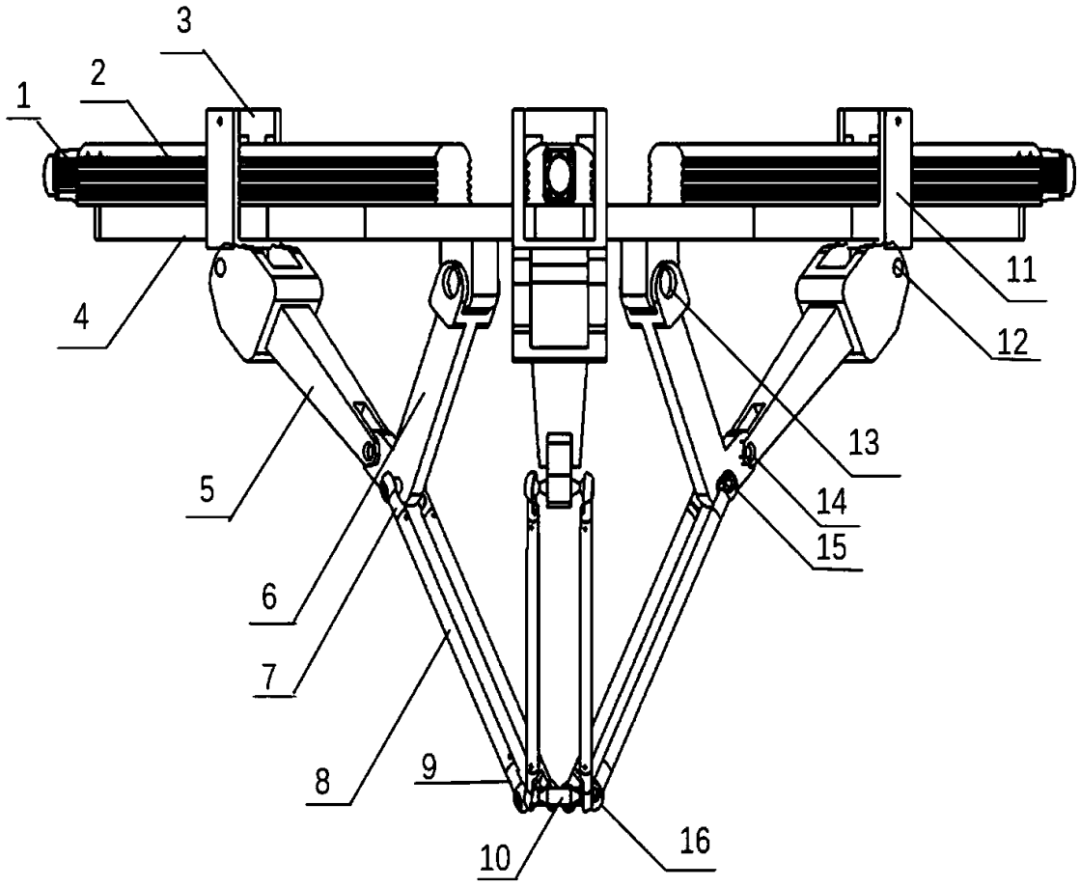
一种新型直线驱动并联机器人
公开号:CN208812084U
专利类型:实用新型
申请人:广州大学
法律状态:有效
技术领域:本实用新型涉及利用Delta并联机构实现空间三自由度移动的直线驱动并联机器人,属于并联机器人机构设计领域。
专利简介:本实用新型属于机器人结构领域,为一种直线驱动并联机器人,包括动平台、定平台、直线电机、直线导轨、直线滑块和三条传动支链,每条传动支链包括一根连接杆、一根多连接杆、两根平行连接杆;直线导轨固定安装在定平台上,直线电机放置在直线导轨外沿,并固定在定平台上,直线滑块安装在直线导轨上组成移动副;在每条传动支链中,连接杆与直线滑块铰接组成转动副,连接杆与多连接杆铰接组成转动副,多连接杆与定平台铰接组成转动副,平行连接杆的两端分别与多连接杆和动平台铰接,构成平行四边形运动链。本实用新型通过控制直线电机驱动直线滑块,将直线滑块的线性移动传递到动平台上,实现动平台的空间三自由度运动的精确控制。
一种双自由度机器人模块
公开号:CN206998928U
专利类型:实用新型
申请人:广州大学
法律状态:有效
技术领域:本实用新型涉及机器人模块的技术领域,尤其涉及一种双自由度机器人模块。
专利简介:本实用新型涉及一种双自由度机器人模块,回转模块包括回转机壳,固定在第一电机的输出轴上的回转主动齿轮,固定在回转机壳上的第一减速器,固定在第一减速器输入端上的回转被动齿轮,固定在第一减速器输出端上的回转输出组件;摆转模块包括与回转机壳相对固定的摆转机壳,固定在第二电机的输出轴上的摆转主动齿轮,固定在摆转机壳上的第二减速器,固定在第二减速器输入端上的摆转被动齿轮,固定在第二减速器输出端上的主动锥齿轮,固定在摆转机壳上的摆转基座,转动式安装在摆转基座上的输出轴,固定在输出轴上的摆转输出组件,固定在输出轴上的被动锥齿轮。该机器人模块结构紧凑,且具有两个自由度,属于机器人模块的技术领域。
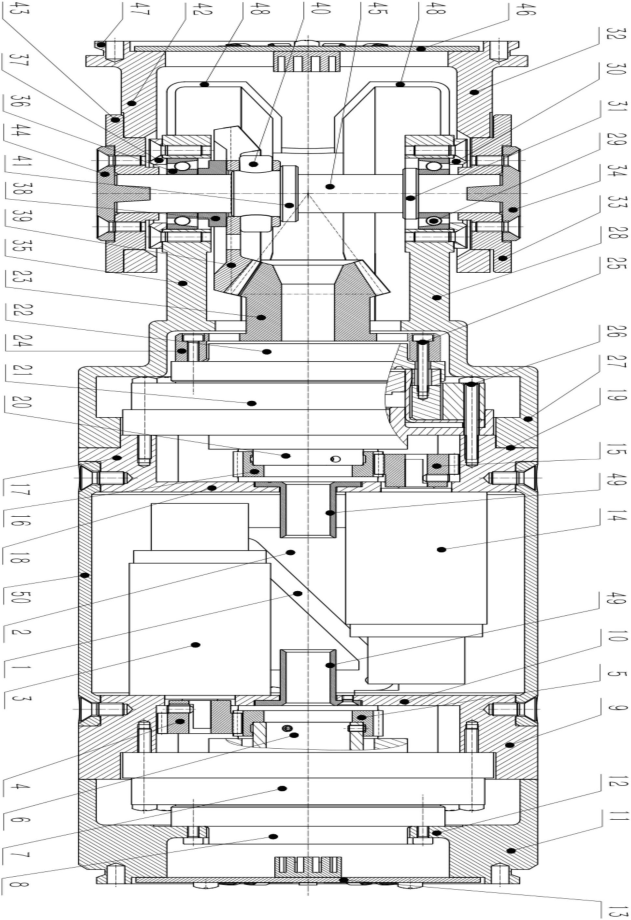
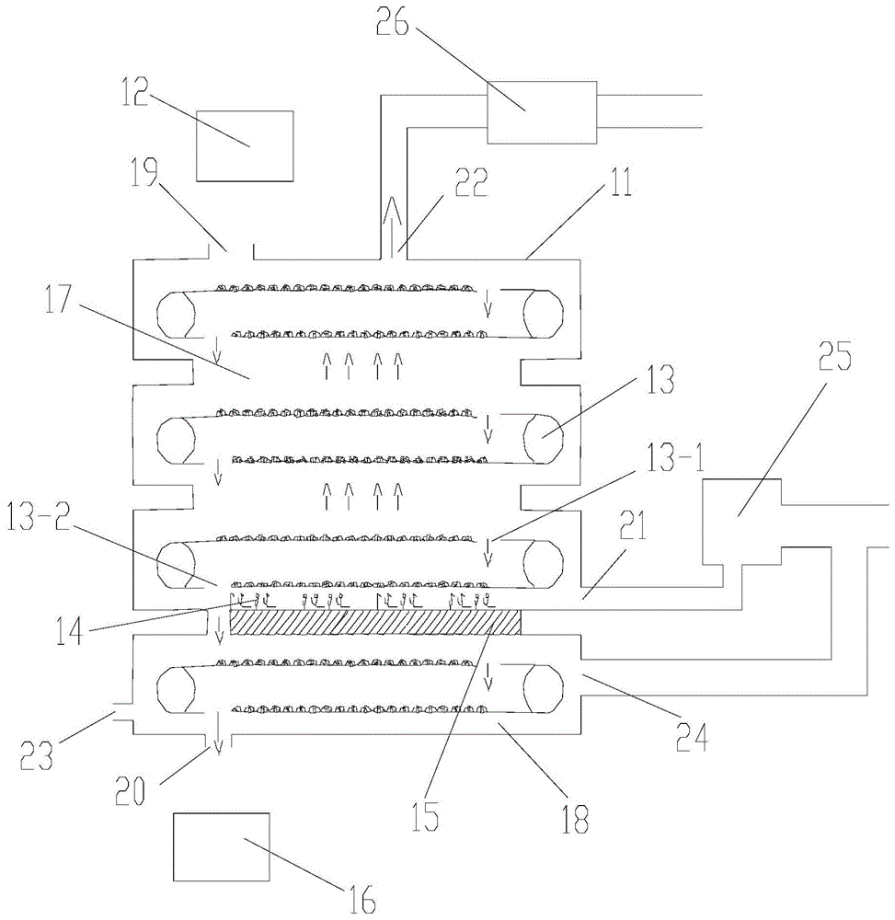
一种用于处理污泥的干化系统
公开号:CN106630534B
专利类型:发明授权
申请人:广州大学
法律状态:有效
技术领域:本发明涉及污泥处理的技术领域,尤其涉及一种用于处理污泥的干化系统。
专利简介:本发明涉及一种用于处理污泥的干化系统,包括外壳、污泥进料装置、多个链板输送装置、导流装置、隔热装置、污泥输出装置;污泥进料装置位于外壳的污泥入口的上方,污泥输出装置位于外壳的污泥出口的下方;设置在外壳内部的多个链板输送装置从上往下依次布置,随着链板输送装置的运转,污泥从上方的链板输送装置掉落在下方的链板输送装置上;设置在外壳内的导流装置和隔热装置将外壳的内部分为干燥室和冷却室,多个链板输送装置位于干燥室内,至少一个链板输送装置位于冷却室内;用于将热气向上导流的导流装置置于干燥室的底部,导流装置位于隔热装置的上方。该干化系统能高效地对污泥进行干化,属于污泥处理的技术领域。
联系方式
如果对以上专利感兴趣请联系奥凯!
联系电话:020-38303455。
真诚欢迎各高校院所推荐项目,欢迎各省市县区、高新区、经开区、园区和企业参与合作对接,同时也欢迎投资机构、行业协会、服务机构联系我们开展合作。
