


1.基本信息:
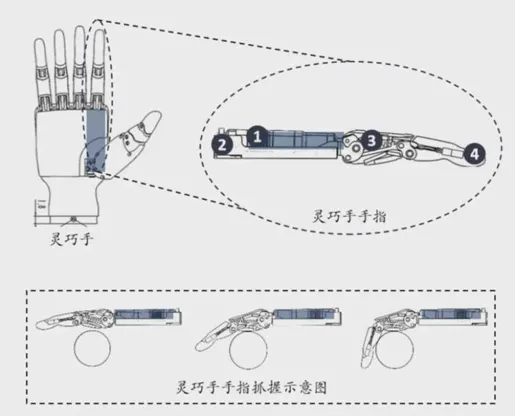
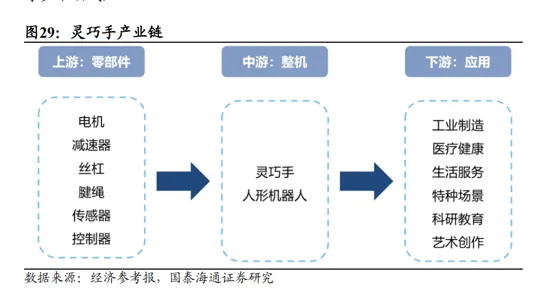
灵巧手的关键组成部分包括驱动系统、传动系统、感知系统、控制系统,具体如下:
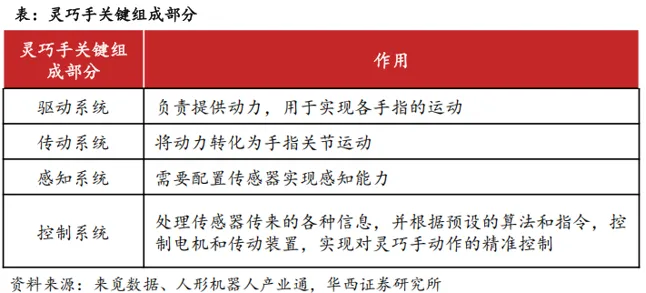
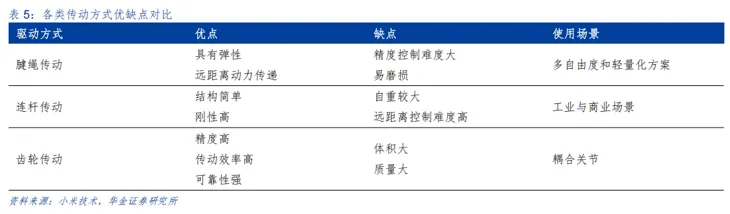
驱动系统:负责提供动力,用于实现各手指的运动;按照驱动源不同可分为电机、液压、气压以及形状记忆合金等,目前以电机驱动为主。 传动系统:将动力转化为手指关节运动。灵巧手的传动方式较多,包括连杆传动、齿轮/蜗轮蜗杆传动、腱绳传动等。
感知系统:需要配置传感器实现感知能力,包括触觉传感器、 力觉传感器等。 控制系统:处理传感器传来的各种信息,并根据预设的算法和 指令,控制电机和传动装置,实现对灵巧手动作的精准控制。
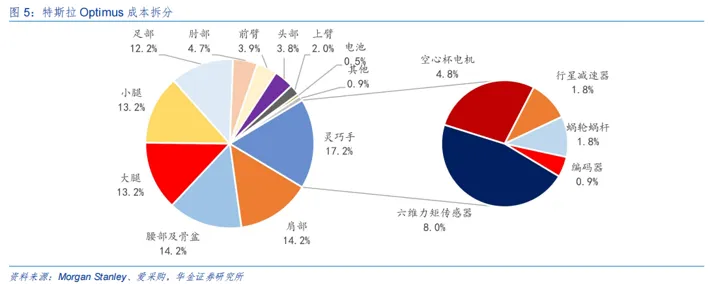
灵巧手约占整机成本 17%,成本层面灵巧手是整机最重要的部件之一。以特斯拉Optimus 为例,从整机各部位的成本拆分来看,灵巧手成本占比约为 17.2%,占最大比重,其中空心杯电机、六维力传感器分别占比 4.8%/8.0%,行星减速器、蜗轮蜗杆、编码器分别占比 1.8%/1.8%/0.9%, 空心杯电机与六维力矩传感器是灵巧手中的核心部件。
2. 灵巧手本体主要上市公司信息:
a.兆微机电: 2024 年11月,公司在深圳高交会上首次发布了全球首创的指关节内置全驱动力单元的灵巧手产品,该产品具有17个主动自由度,每个指关节均配备独立高功率密度微电机模组,可实现独立控制;单指节实现3个及以上主动单元配置,灵活性与精度接近人手,解决了传统灵巧手在复杂抓握任务中的瓶颈;集成的柔性电子皮肤,具备多模态感知能力,并逐步建立基于不同工作场景的强化学习模型,提升与具身智能大模型的模仿学习效率,提高灵巧手的智能性;凭借高精度设计、卓越的稳定性和耐久性结构等优势,大幅提升使用寿命,产品符合工业级产品的标准。 2025 年 7月,公司发布新一代仿生灵巧手系列产品DM17与LM06,通过差异化设计满足多元场景需求。DM17依旧采用全直驱方案,集成了微型减速器、电机、控制单元及电子皮肤传感器等,具备17个主动自由度,通过多关节多层级力位协同的柔顺控制,可执行更为复杂精细的动作;LM06采用连杆方案,具备6个自由度,具备20公斤级抓握负载,可满足高强度作业场景需求。
b.雷赛智能: 积极布局人形机器人领域,作为未来业务发展的重要战略方向之一,定位是为广大机器人客户提供核心零部件、组件和解决方案。子公司上海雷赛机器人科技有限公司,主要聚焦“超高密度”无框电机、关节模组解决方案;子公司深圳市灵巧驱控技术有限公司,主要聚焦空心杯电机以及灵巧手解决方案,持续为客户创造价值。同时,基于公司在运动控制技术领域的多年积累和经验,已推动通用机器人运动控制系统(俗称“小脑”)相关产品进入研发 阶段。公司通过三种业务模式,与数百家国内外机器人企业,以及模组厂家进行长期的业务合作:第一种模式是提供以无框电机、空心杯电机、微型驱动器、编码器为代表的高质价比的核心零部件和解决方案;第二种模式是为大客户提供关节模组解决方案和灵巧手联合开发;第三种模式是为广大客户提供代工与组装服务。

3. 投资参考: 兆威机电可以灵巧手模组的龙头企业,通过特斯拉多轮验证,即将量产;与华为、宇树等深度合作,2025上半年营收7.87亿(+21.93%),灵巧手业务占比25%,PE约104倍,反映高预期; 雷赛智能是运动控制专家,后起之秀,2025上半年自由现金流充,PE约59倍; 像兆威机电和雷赛智能,它们不单卖零件,而是提供集成了传动、驱动和初步感知的手指或整手模组,其价值在于精密制造、系统集成和客户认证能力。一旦绑定特斯拉等头部厂商并随其大规模量产,业绩弹性会非常显著。但这个环节竞争也更激烈,需要密切关注其量产进度和良率。