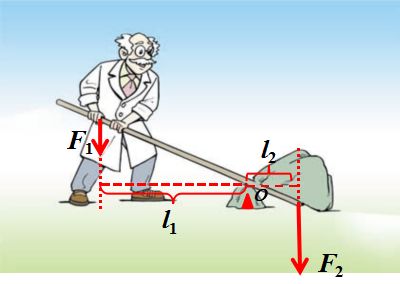
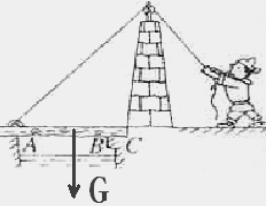
人类很早以前就使用杠杆了。壮丽辉煌的咸阳宫曾巍然矗立于八百里秦川。司马迁在《史记·荆柯列传》中有关于这座宫殿的描述。上图就是我们的祖先在建造宫殿时利用木棒搬动巨大木料的情景。你能讲出其中的道理吗?
杠杆
当你用筷子夹菜、用剪刀剪纸用天平称量时,你就在使用杠杆了。杠杆是最简单的机械之一。如图12.1-1,一根硬棒,在力的作用下能绕着固定点O转动,这根硬棒就是杠杆(lever)。

在了解杠杆的作用之前,我们先熟悉几个名词。
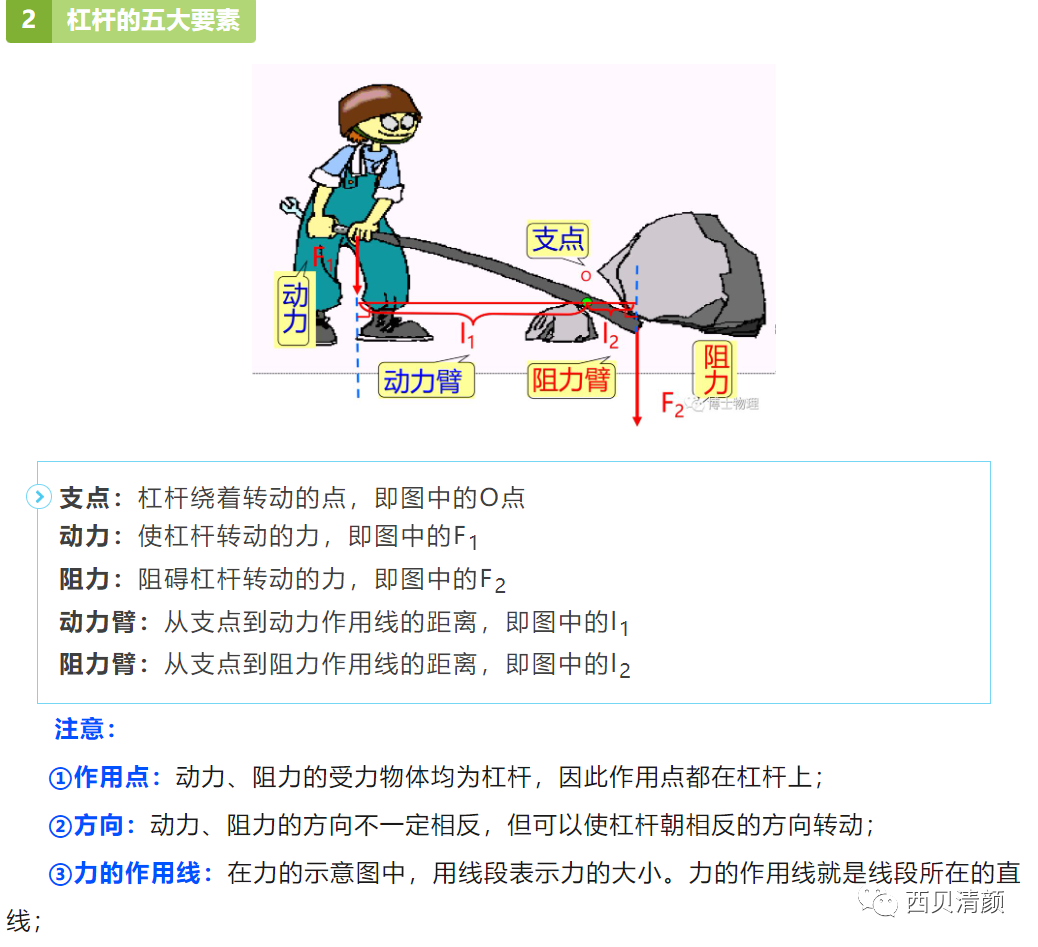
支点:杠杆可以绕其转动的点O
动力:使杠杆转动的力F1
阻力:阻碍杠杆转动的力F2
动力臂:从支点O到动力F1作用线的距离L1
阻力臂:从支点O到阻力F2作用线的距离L2
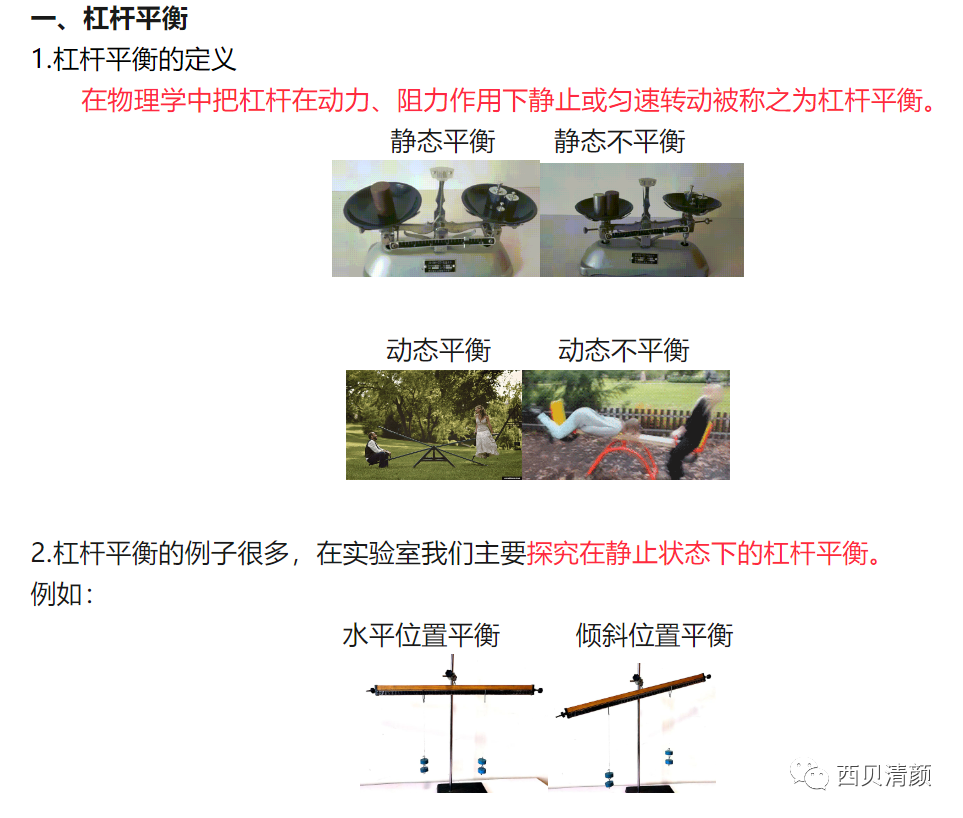
当杠杆在动力和阻力作用下静止时,我们就说杠杆平衡了
杠杆的平衡条件
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。杠杆在满足什么条件时才会平衡?

生活中的杠杆
我们身边有很多杠杆。例如,小朋友玩的跷跷板,拔钉子用的羊角锤划船用的船桨······仔细观察这些杠杆,看看它们各自的动力臂和阻力臂有什么关系。
等臂杠杆天平的动力臂与阻力臂相等,是一种等臂杠杆。
省力杠杆利用图121-1中的撬棒,只要用很小的力,就能撬动很重的石头。这类杠杆是省力杠杆,它的动力臂比阻力臂长。这类杠杆虽然省力,但是动力作用点移动的距离却比阻力作用点移动的距离大,省了力,却费了距离。
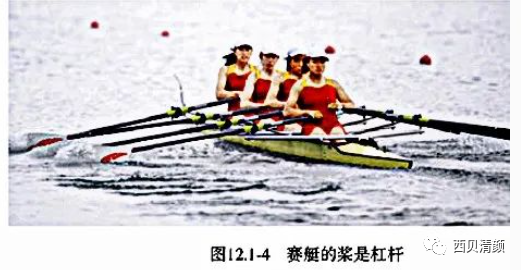
费力杠杆 注意观察图12.1-4中赛艇的船桨,它也是一种杠杆。人坐在船上观察,划船时船桨的轴是不动的,所以,轴的位置是支点。手加在桨上的动力比水对桨的阻力大,但是手只要移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是,杠杆的动力臂比阻力臂短,动力比阻力大,所以把它叫做费力杠杆。这类杠杆动力作用点移动的距离比阻力作用点移动的距离小,虽然费力,却省了距离。
杠杆是我们最常见的简单机械,它应用广泛,下面都是生活中的杠杆,你使用过它们吗?

一、定义:在力的作用下,能绕固定点转动的硬棒,叫做杠杆
二、杠杆的五要素:
支 点:杠杆可以绕其转动的点O。
动 力:使杠杆转动的力F1。
阻 力:阻碍杠杆转动的力F2。
动力臂:从支点O 到动力F1作用线的距离L1。
阻力臂:从支点O 到阻力F2作用线的距离L2。
羊角锤就是一个省力的杠杆,你能找到它的“五要素”吗?
杠杆平衡:杠杆在动力和阻力作用下静止时,我们就说杠杆平衡。
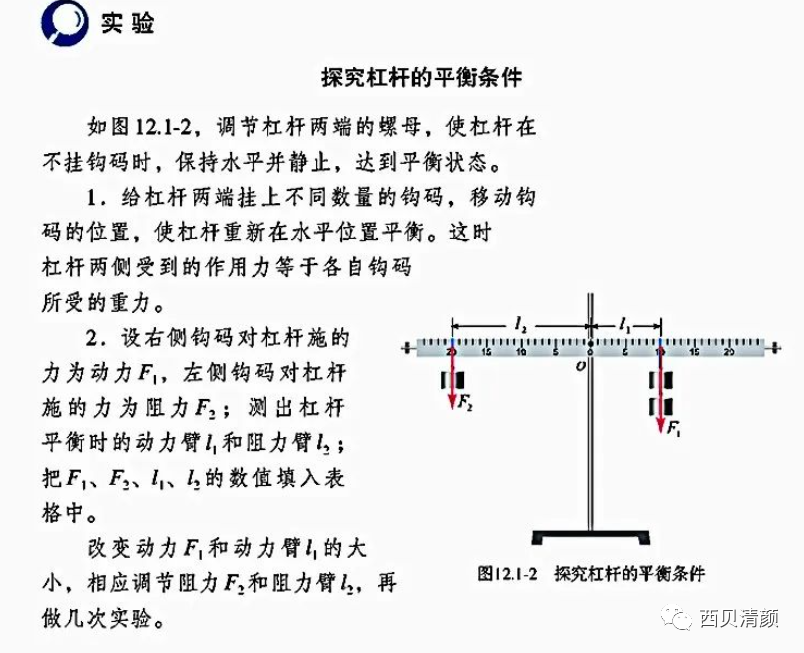
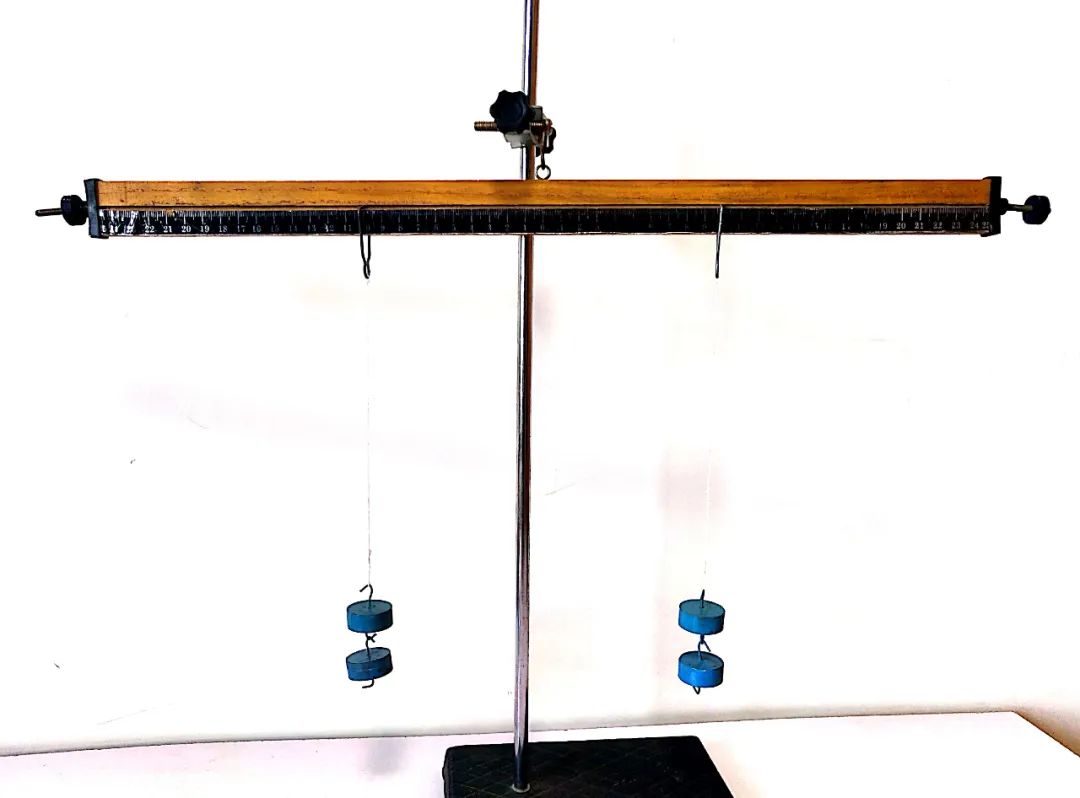
(1)调节平衡螺母,使杠杆水平平衡
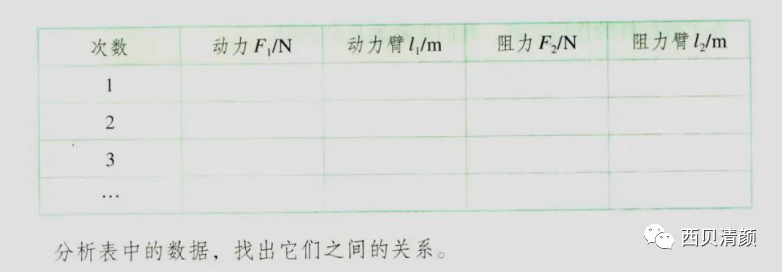
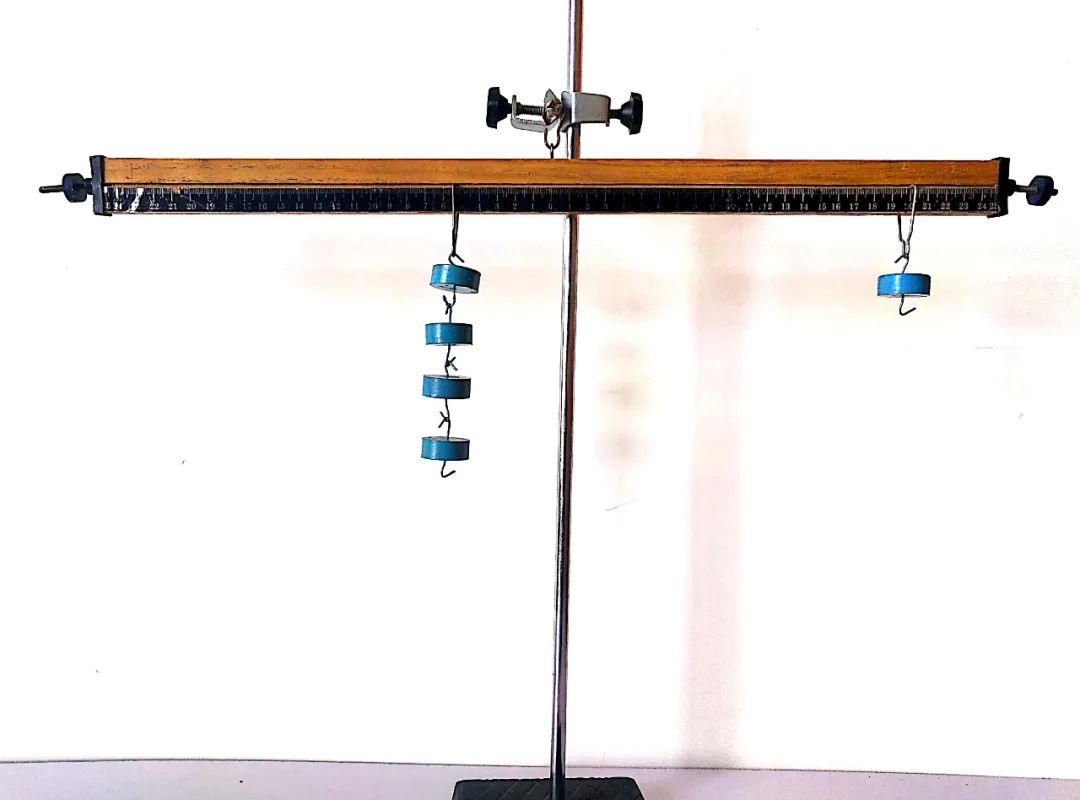
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
(4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
实验次数 | 动力F1/N | 阻力F2/N | 动力臂l1/m | 阻力臂l2/m |
1 | ||||
2 | ||||
3 | ||||
4 | ||||
5 | ||||
6 |
不断改变力与力臂的大小,使杠杆平衡,并记下每次平衡时的动力、动力臂、阻力、阻力臂的大小记录在上面的表格中。根据数据就可以总结出如下规律:

影响杠杆平衡的因素
[观察与实验]
3..推动平衡杠杆一侧钩码的悬线,改变作用力的方向,会发现杠杆不在平衡。

三、杠杆平衡的条件
[观察与实验]
探究杠杆平衡条件时,需要测出动力、阻力、动力臂和阻力臂。
动力和阻力用弹簧测力计测出,力臂可以用刻度尺测出,但实验中若杠杆不在水平位置平衡,用刻度尺很难测出动力臂和阻力臂的大小。
实验图 力臂示意图
[实验反思]
(1)便于测量动力臂和阻力臂;
(2)消除杠杆自身重力对实验的影响。
2.为了避免实验结论出现偶然性,获得普遍规律,实验至少做3-5次。
3.当杠杆支点在一端时,拉动杠杆的弹簧测力计示数出现变化,是由于拉力跟杠杆没有垂直造成。
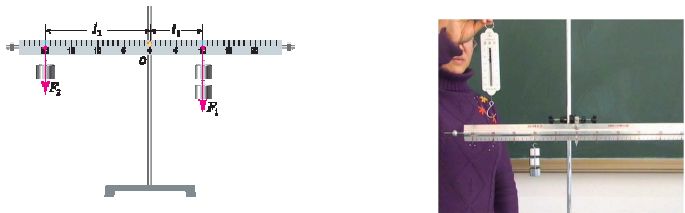
杠杆平衡实验图
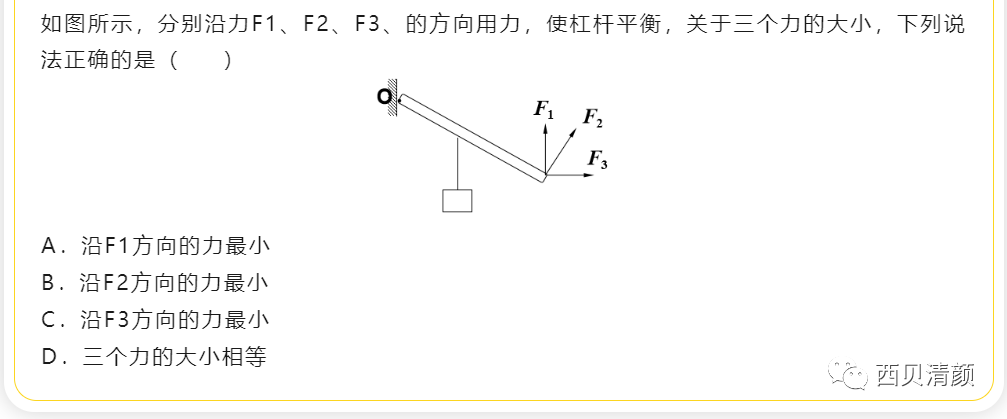
答案:B
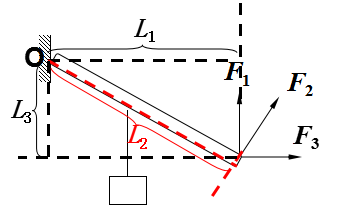
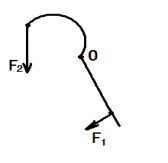
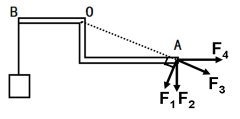
解析:如图,先画出这三个力的力臂,在我们无法减小阻力与阻力臂的情况下,想办法使动力臂最大,就可以使动力最小。所以可以从图中看出:F2的力臂L2最大,所以利用F2拉起物体时最省力。所以选B.
上图中:随着动力方向的变化,动力臂也在变化,但只有一种情况最省力。
延伸思考:
如上图:自行车向右行驶,观察动力臂的变化,说一说,蹬自行车时,在踏板处于什么位置时用力蹬最省力,为什么?
总结:动力臂最大时杠杆最省力!但什么情况才是动力臂最大呢?动力垂直于支点到动力作用点的连线时的动力臂就是最大的。比如下图中的F1。
①实验前,要调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,是为了从杠杆上方便地读出或测量出力臂,如图所示,杠杆在水平位置平衡是,其力臂与杠杆是重合的,可在带有刻度的杠杆上直接读出力臂长度,便于实验操作;
②实验时,我们一般选取杠杆的中央位置作为杠杆的支点,杠杆的支点通过杠杆的重心,重力的力臂为零。这样做的目的是:为了消除杠杆自身重量对实验结论的影响,不影响杠杆平衡条件。
实验结论
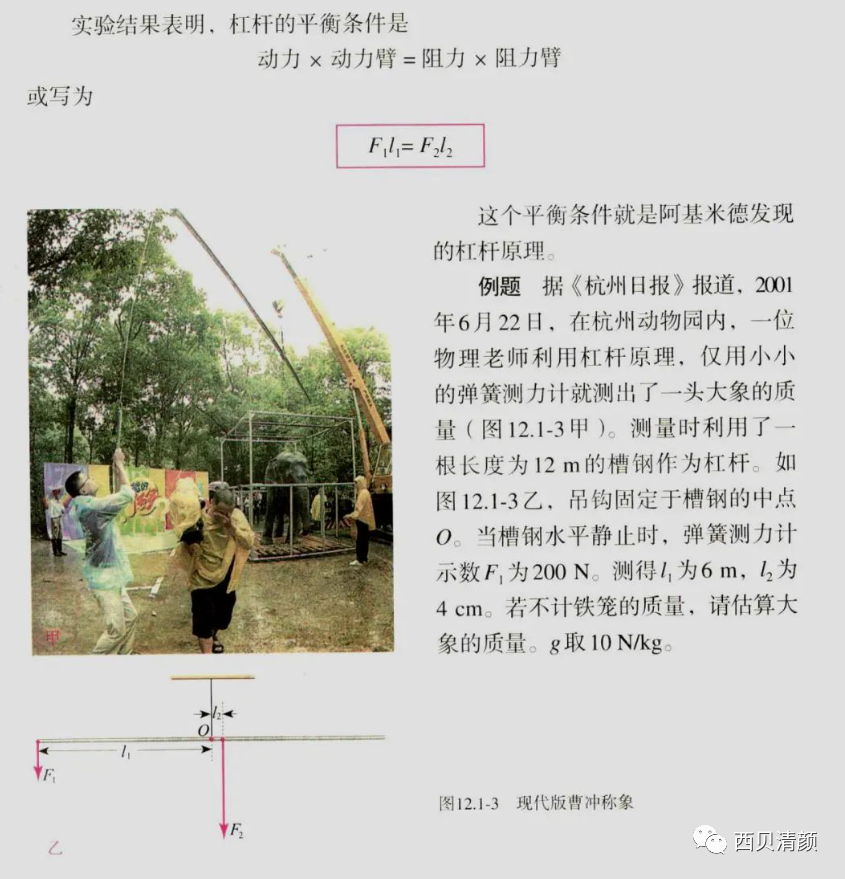
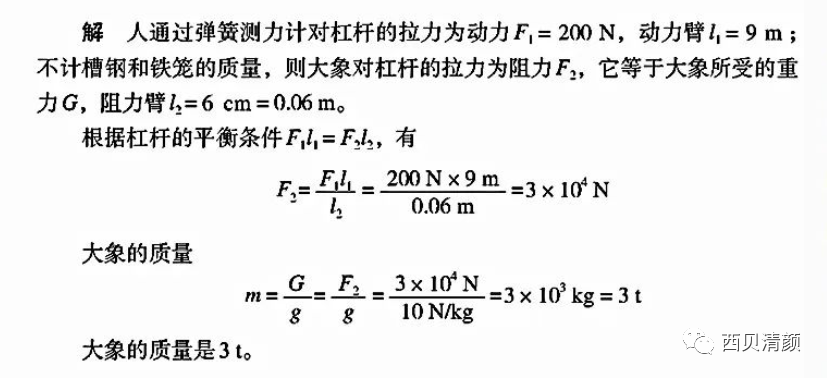
从视频中的实验,我们不难得出,杠杆的平衡条件是:
用字母表示可以写成:
上面的式子被称为杠杆的平衡条件,也称为杠杆原理,最早是由古希腊学者阿基米德总结出来的。注意:力的单位用N,力臂的单位只要统一就可以了。
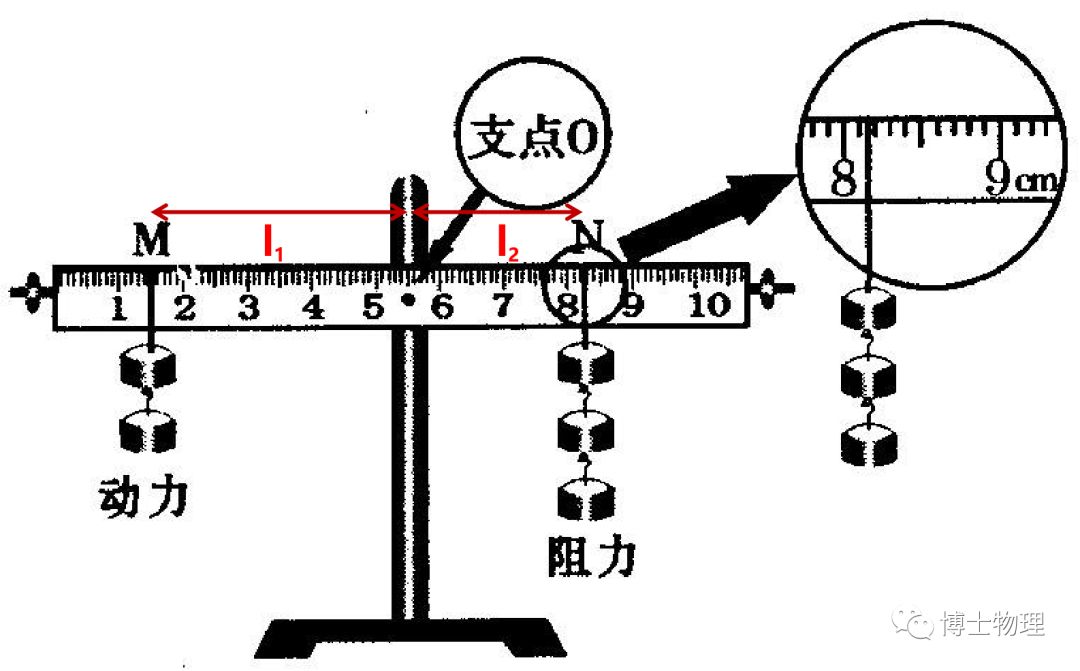
典型例题:【2017•苏州】在“探究杠杆的平衡条件”实验中:
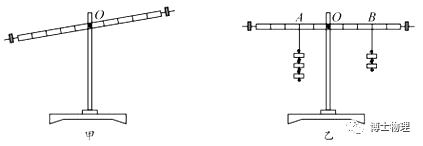
(1)图甲中,为使杠杆在水平位置平衡,应将右端的平衡螺母向________侧调节.
(2)图乙中,杠杆恰好处于水平平衡状态,若在A处下方再挂一个钩码,则B处所挂钩码须向右移动________格,可使杠杆在水平位置再次平衡.
(3)杠杆处于图甲所示位置时,小李同学就在杠杆上挂钩码进行实验,小明认为这样操作会对实验产生以下影响:
①杠杆自身重力可能会对实验产生影响
②可能不便于测量力臂或出现力臂测量错误
③无法得出杠杆平衡条件
你认为正确的是 .
A、①② B、①③ C、②③
【考点】探究杠杆的平衡条件实验
【解析】【解答】解:(1)如图,杠杆的右端上翘,所以平衡螺母向上翘的右端移动.(2)设一个钩码为G,一格的长度为L; 根据杠杆的平衡条件:4G×2L=2G×nL,解得:n=4,故应该将B处所挂钩码须向右移动4﹣3=1格;(3)杠杆处于图甲所示位置时,杠杆不在水平位置平衡,杠杆的重心在支点上,杠杆的自重对杠杆平衡产生影响且力臂不在杠杆上,不便于测量力臂,不便于得出杠杆的平衡条件,但可以得出杠杆的平衡条件.①③正确,故选B.
【答案】(1)右;(2)1;(3)B.
【分析】(1)调节平衡螺母向上翘的一端移动,使杠杆在水平位置平衡.(2)杠杆的平衡条件:动力×动力臂=阻力×阻力臂;(3)调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态,这时杠杆的重心在支点上,使杠杆的自重对杠杆平衡不产生影响,且便于测量力臂。
一、机械通俗地讲就是我们平常使用的各种工具,机械的使用能给我们带来很多方便。
二,杠杆的分类:
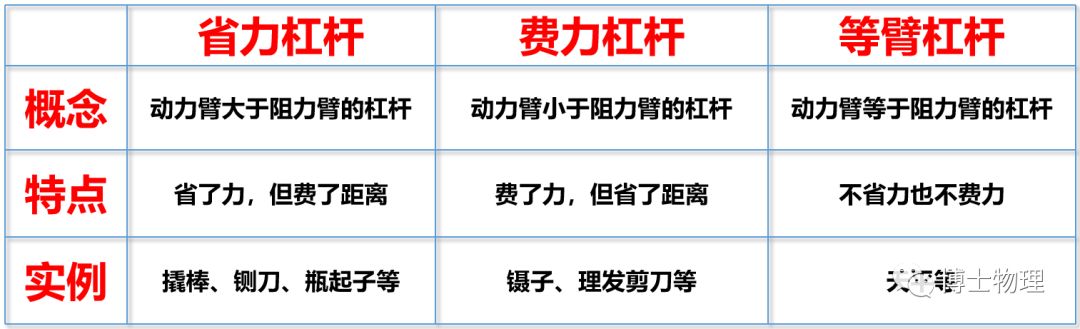
1、省力杠杆:
动力臂大于阻力臂,动力小于阻力。省力但要费距离。

2、费力杠杆:
动力臂小于阻力臂,动力大于阻力。费力但会省距离。

3.等臂杠杆:
动力臂等于阻力臂,动力等于阻力。

阿基米德说给我一个支点和一根足够长的硬棒,我就能撬动地球,他为什么能翘起地球呢?
杠杆的分类
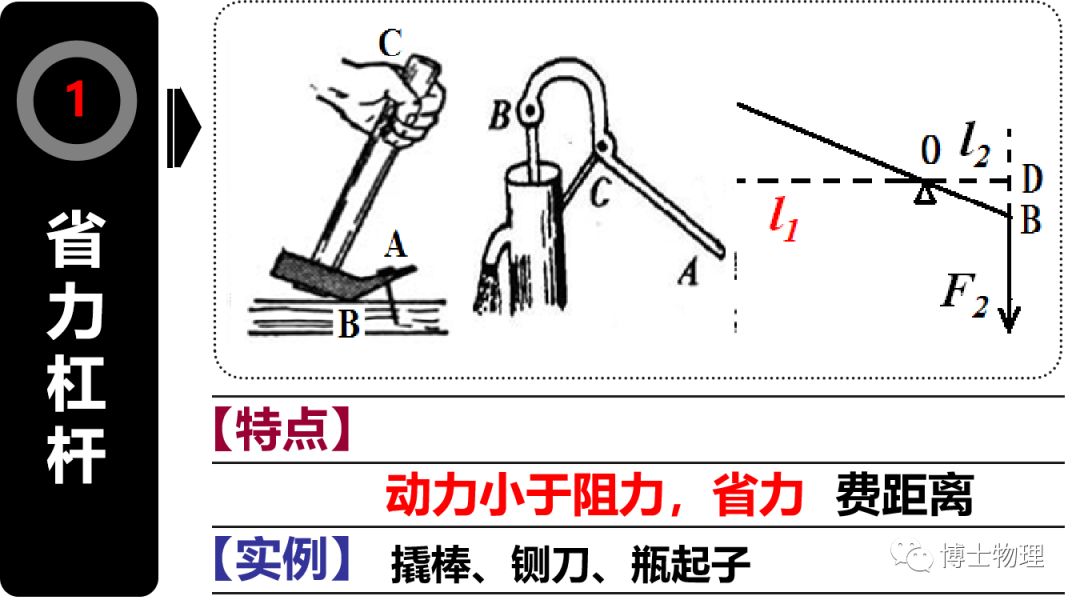
特点:动力臂大于阻力臂,动力小于阻力,省力费距离。
实例:撬棒、铡刀、瓶起子、扳手
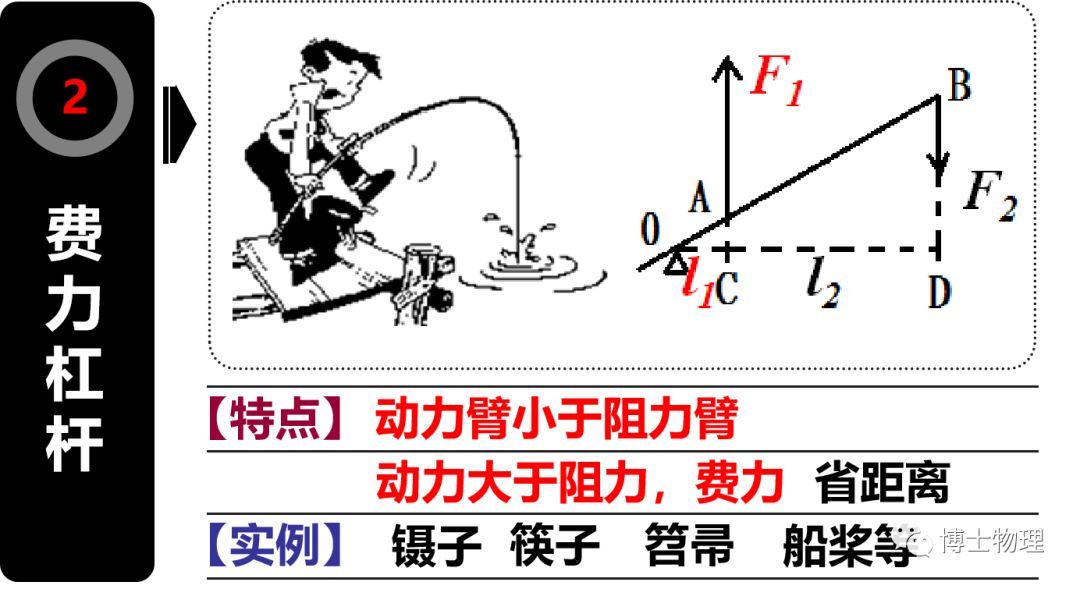
特点:动力臂小于阻力臂,动力大于阻力,费力省距离。
实例:镊子、理发剪刀、筷子、笤帚、船桨、钓鱼竿等

特点:动力臂等于阻力臂,动力等于阻力,不省力也不省距离。
实例:天平
杠杆的类型
1.省力杠杆
如下图,使用撬棒时,使用很小的力就能撬动很重的石头。
省力杠杆示意图

这种杠杆的特点是:
杠杆的动力臂比阻力臂长(L1>L2),动力比阻力小(F1<F2)这种杠杆被称为省力杠杆。

2.费力杠杆

划桨杠杆示意图

这种杠杆的特点是:

3.等臂杠杆
天平 等臂杠杆示意图

这种杠杆的特点是:
跷跷板

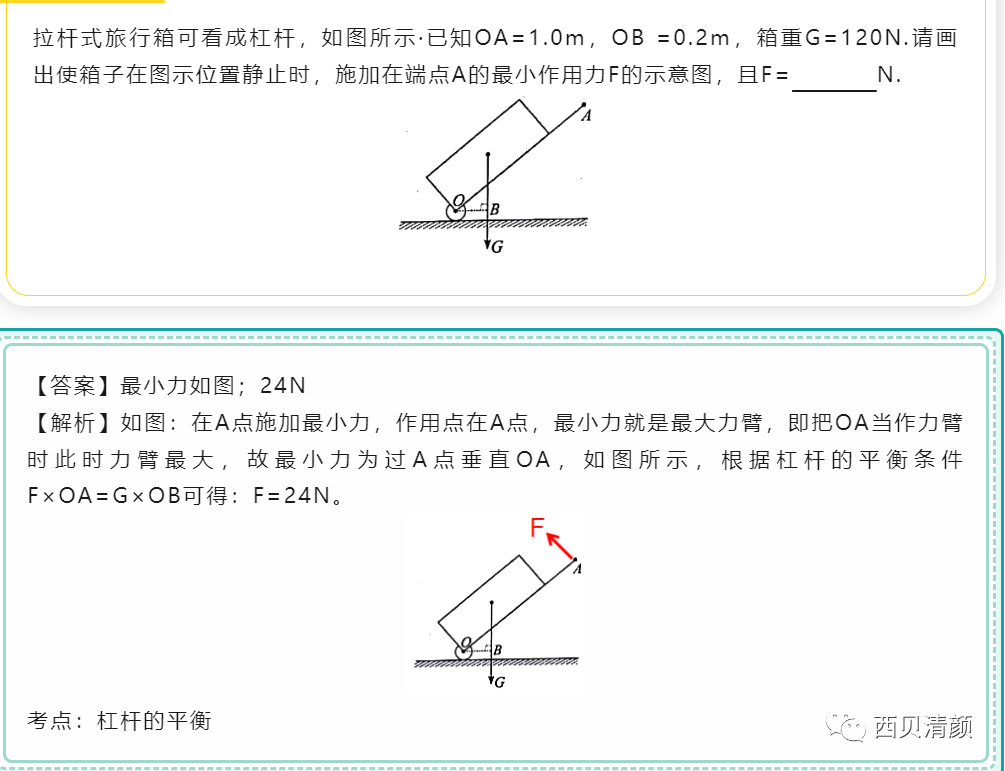
二、杠杆的最小力
杠杆最小力是指:
1、杠杆在我国古代就有了许多巧妙的应用,护城河上安装的吊桥就是一个杠杆(如图所示),它的支点在____点,在匀速拉起吊桥时,它属于一个______杠杆。
2、不法商贩在商品交易中,把标准秤砣换成质量较小的秤砣,则称出物品的质量比真实质量偏______
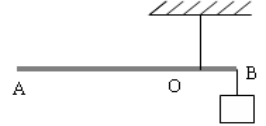
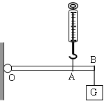
3、如图所示,一根粗细均匀的硬棒AB被悬挂起来,已知AB=6BO,当在B处挂100N的重物时,杠杆恰好平衡,则杠杆自身重为_________N。
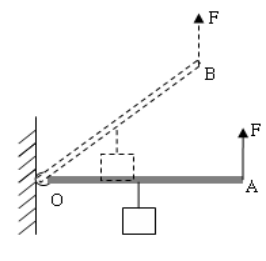
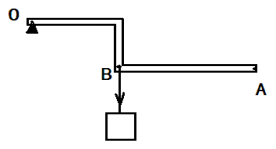
4、如图所示,轻质杠杆OA中点悬挂一个重为60N的物体,在A端施加一坚直向上的力F,杠杆在水平位置平衡则F=______N。保持F的方向不变,将杠杆从A位置匀速提到B位置的过程中,力F将_______(变大/变小/不变)
5、下列工具中是省力杠杆的是________,是费力杠杆的是_______,是等臂杠杆的是_______(填序号)
(1)铡刀 (2)镊子 (3)自行车的刹车闸 (4)缝纫机的脚踏板 (5)天平 (6)剪铁皮的剪刀 (7)行李车 (8)瓶盖起子
6、下列哪一组所列的器具都是杠杆( )
A、剪刀、筷子、打气筒
B、锅铲、钓鱼竿、桌子
C、钢笔、电灯、直尺
D、撬棒、跷跷板、天平横梁
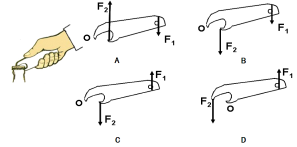
7、如图所示,开瓶盖的起子可以看作是一个杠杆,在图中能正确表示开瓶盖时,杠杆的支点、动力和阻力的是( )
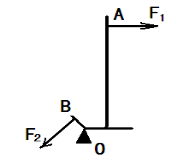
8、如图所示,杠杆AOB可以绕O点转动,现在它的B点挂一重物G,为了使它静止,可以在A点施加不同方向的力,图中四个方向的力中,力臂最大的是( )
A、F1 B、F2
C、F3 D、F4
9、如图所示,AOB是一杠杆(自重不计)O为支点,OA<0B, OD=OA,在A端悬挂一重物G,那么( )
A、在B点用力使杠杆在图示位置平衡,一定是省力的
B、在C点用力不可能使杠杆在图示位置平衡
C、在B点用力使杠杆在图示位置平衡,沿竖直方向最省力
D、在D点悬挂一个与G完全相同的物体能使杠杆在图示位置平衡。
10、如图所示,手持弹簧测力计竖直向上拉,使杠杆处于水平平衡状态,弹簧测力计的示数是5N,OA=80cm,AB=20cm,则物体的重是( )
A、20N B、4N
C、1.25N D、条件不足,无法判断
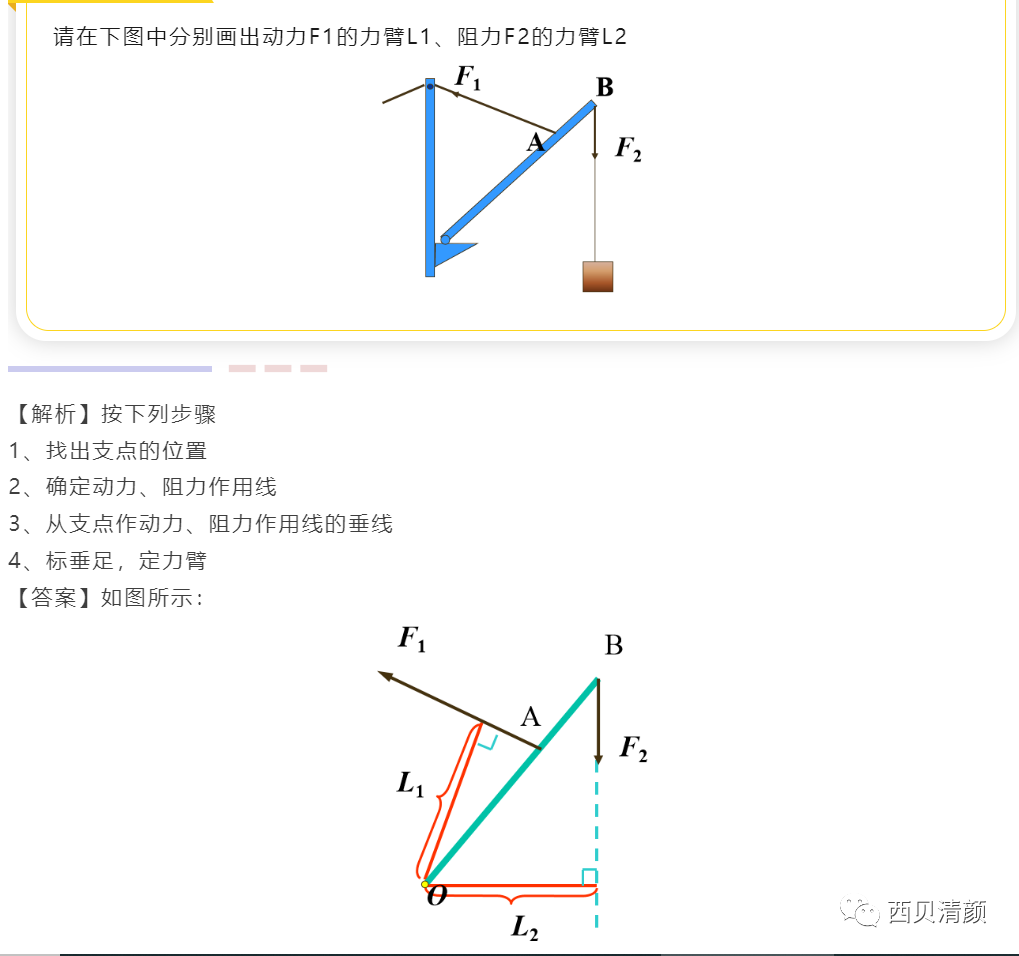
11、要使杠杆在图示位置能静止,请在A点施加一力,并且要求此力的力臂最长
12、作出羊角锤、抽水机的曲柄的动力臂与阻力臂