




❤️点点关注,每日更新50篇论文,不错过任何科研进展!
————————————————————
❓USIM 和 U0 是什么?有什么创新点?
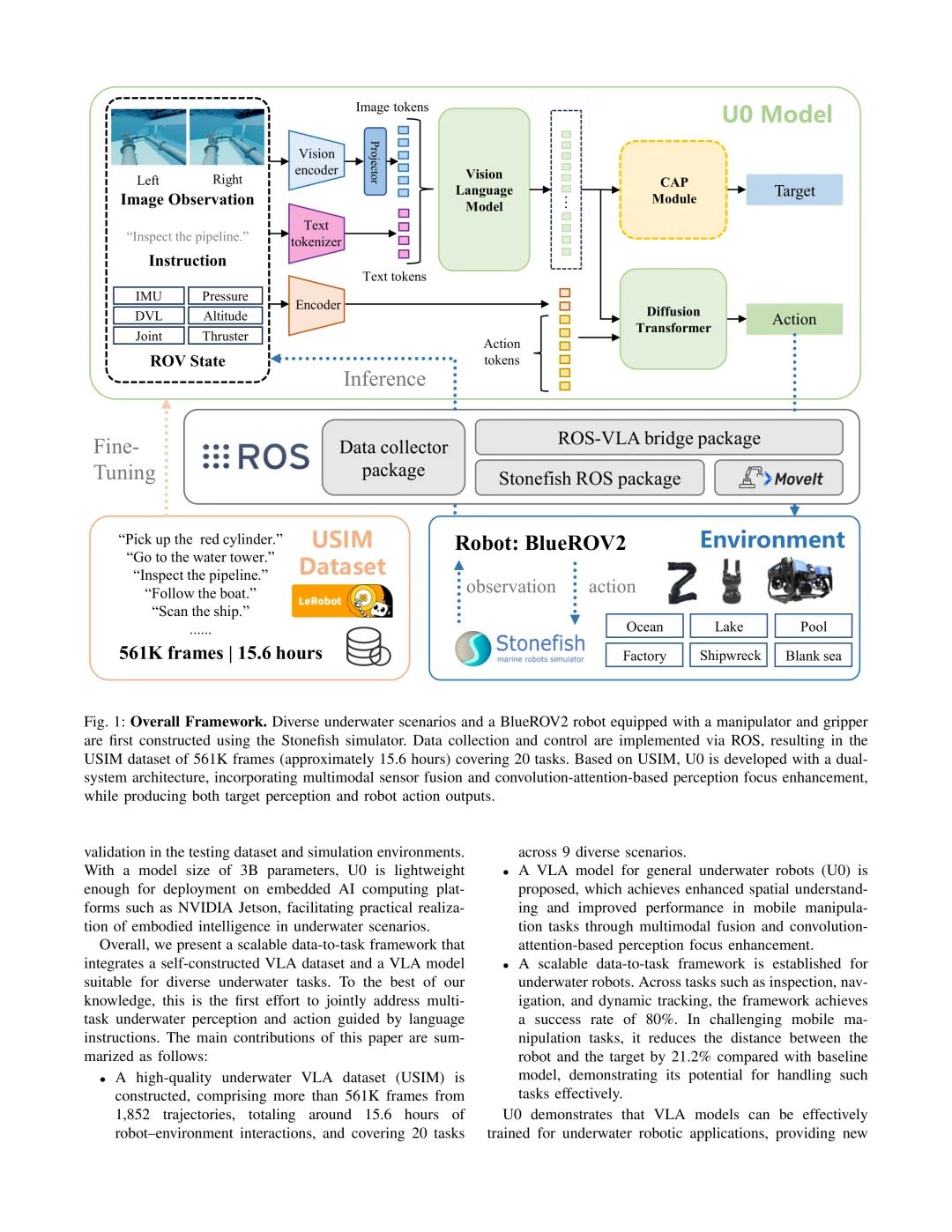
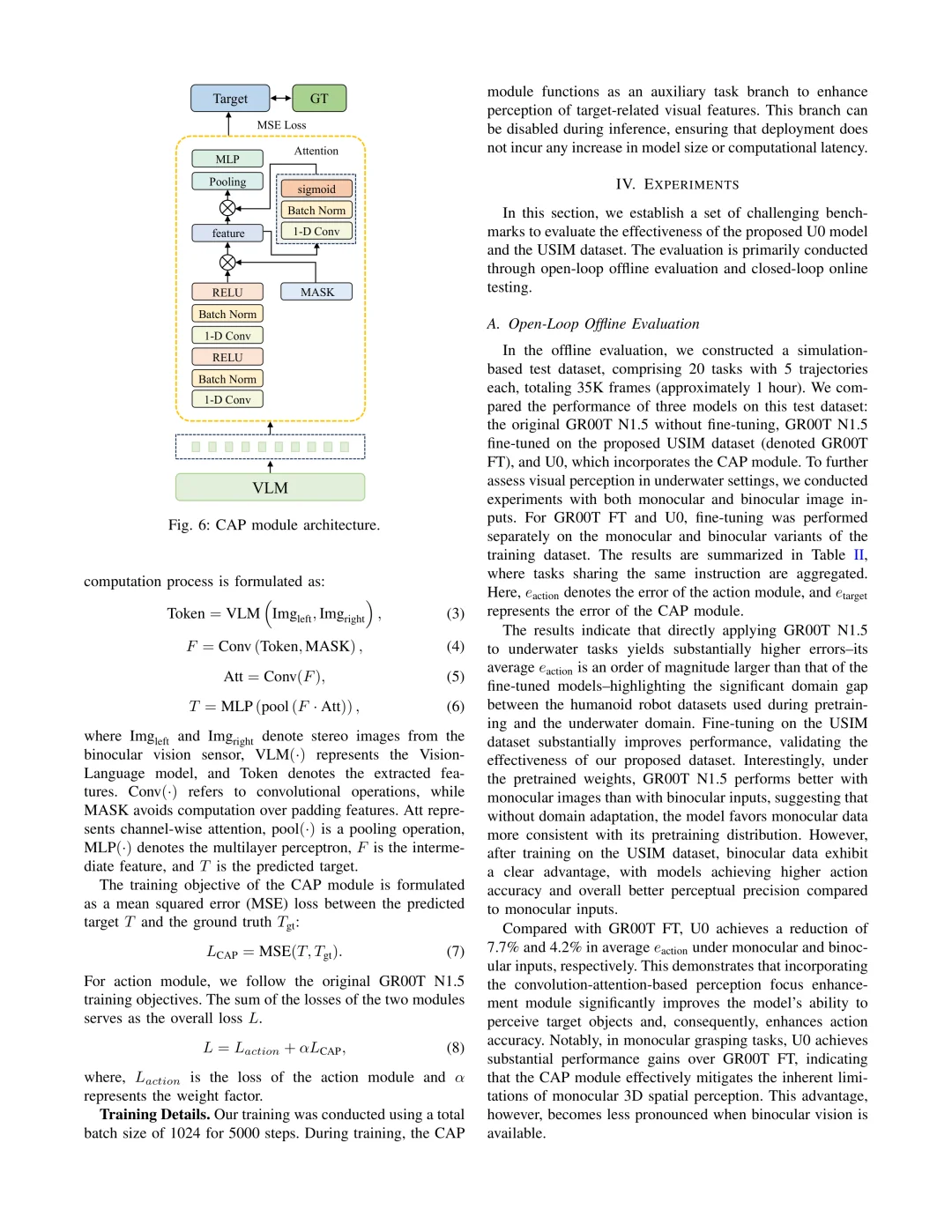
USIM 是一个面向水下机器人,基于仿真的多任务视觉-语言-动作(Vision-Language-Action, VLA)数据集,由 Junwen Gu、Zhiheng Wu 等人联合中国科学院自动化研究所复杂系统认知与决策智能重点实验室(The Key Laboratory of Cognition and Decision Intelligence for Complex Systems, Institute of Automation, Chinese Academy of Sciences)和百度公司(Baidu Inc.)共同开发。USIM 包含了 561,000 多帧数据、1,852 条轨迹,总计约 15.6 小时的 BlueROV2 机器人交互,涵盖视觉导航到移动操作等 20 个任务,分布在 9 个多样化场景中。基于该数据集,作者提出了 U0——一个面向通用水下机器人的 VLA 模型,能够融合双目视觉和多种传感器信息,并通过卷积-注意力机制提升空间理解和操作能力。
❓USIM 数据集是如何构建的?
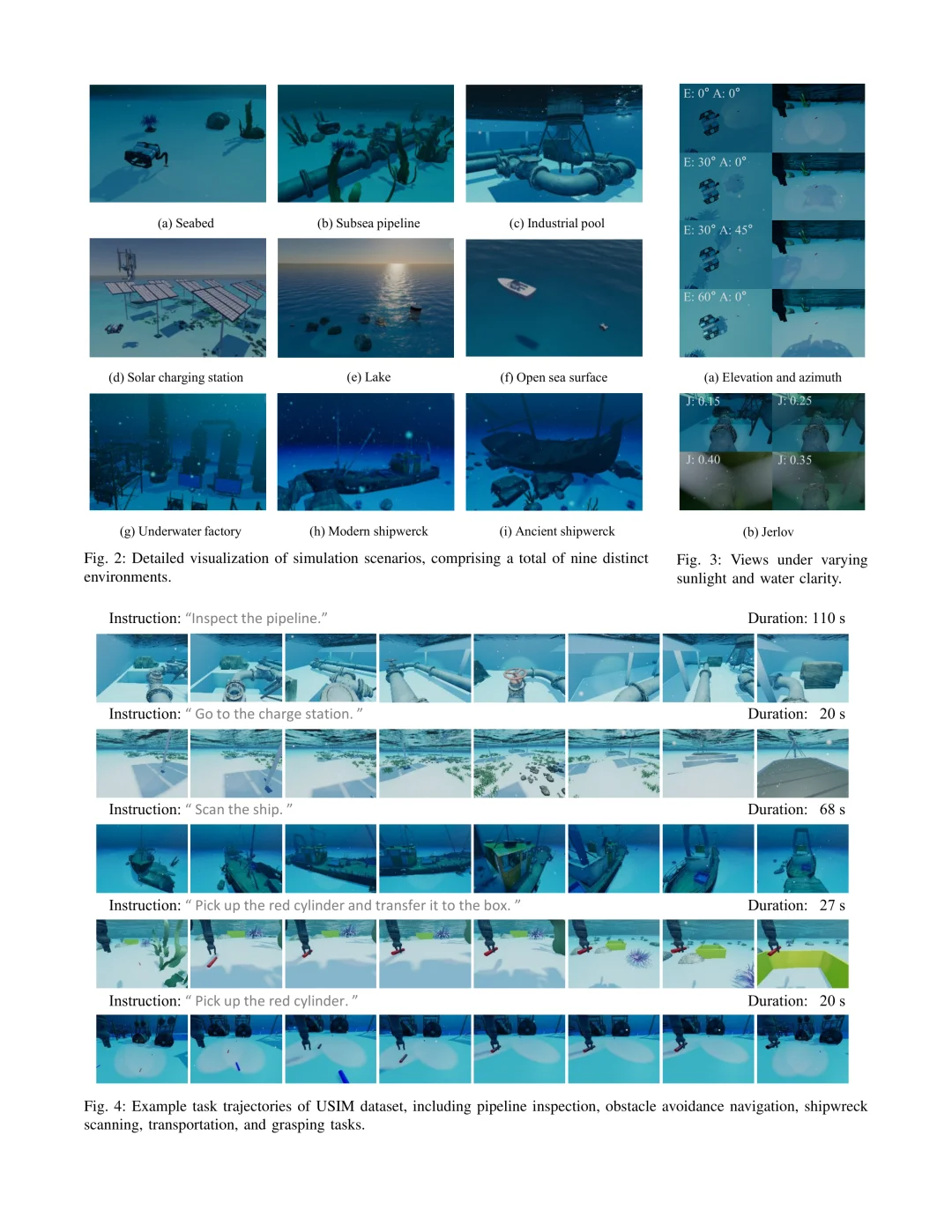
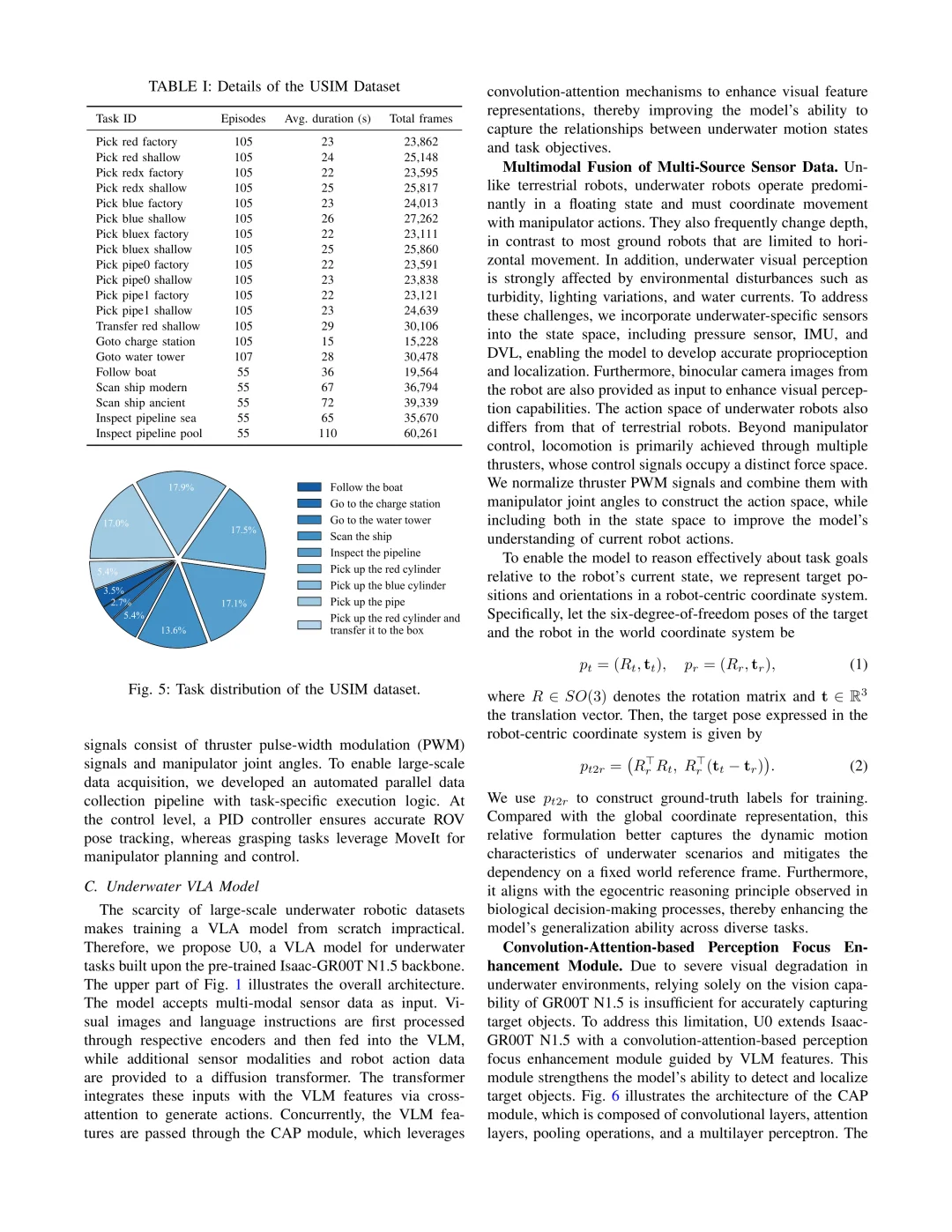
USIM 数据集通过 Stonefish 仿真器构建 9 个不同的水下场景,包括海底、管道、湖泊、工厂、沉船等。BlueROV2 机器人配有机械臂与抓手,能模拟真实的水下运动、碰撞与抓取。数据采集采用自动化并行管线,覆盖 20 种任务,如抓取、管道检测、扫描、障碍物规避、动态跟踪和运输等。数据集不仅包含语言指令,还集成双目摄像头图像、压力、IMU、DVL 等多模态传感器信息,以及推进器和机械臂的控制信号,从而为模型的多任务学习和泛化提供坚实基础。
arXiv: 2510.07869v3#水下机器人 #人工智能 #视觉语言模型 #中科院自动化所 #果壳智算
————————————————————
❓USIM 和 U0 是什么?有什么创新点?
USIM 是一个面向水下机器人,基于仿真的多任务视觉-语言-动作(Vision-Language-Action, VLA)数据集,由 Junwen Gu、Zhiheng Wu 等人联合中国科学院自动化研究所复杂系统认知与决策智能重点实验室(The Key Laboratory of Cognition and Decision Intelligence for Complex Systems, Institute of Automation, Chinese Academy of Sciences)和百度公司(Baidu Inc.)共同开发。USIM 包含了 561,000 多帧数据、1,852 条轨迹,总计约 15.6 小时的 BlueROV2 机器人交互,涵盖视觉导航到移动操作等 20 个任务,分布在 9 个多样化场景中。基于该数据集,作者提出了 U0——一个面向通用水下机器人的 VLA 模型,能够融合双目视觉和多种传感器信息,并通过卷积-注意力机制提升空间理解和操作能力。
❓USIM 数据集是如何构建的?
USIM 数据集通过 Stonefish 仿真器构建 9 个不同的水下场景,包括海底、管道、湖泊、工厂、沉船等。BlueROV2 机器人配有机械臂与抓手,能模拟真实的水下运动、碰撞与抓取。数据采集采用自动化并行管线,覆盖 20 种任务,如抓取、管道检测、扫描、障碍物规避、动态跟踪和运输等。数据集不仅包含语言指令,还集成双目摄像头图像、压力、IMU、DVL 等多模态传感器信息,以及推进器和机械臂的控制信号,从而为模型的多任务学习和泛化提供坚实基础。
arXiv: 2510.07869v3#水下机器人 #人工智能 #视觉语言模型 #中科院自动化所 #果壳智算