


西湖大学赵世钰教授团队在《自然》上发表的多无人机协同操作研究,实现了无人机在飞行中像“叠罗汉”一样垂直堆叠并精准交换工具,标志着无人机从“单兵作战”迈向“群体协作”的关键突破。
这项名为“飞行工具箱”的研究攻克了一个核心难题:当一架无人机飞至另一架正上方时,其螺旋桨产生的强烈下洗气流(相当于6级强风)会严重破坏下方无人机的稳定性。然而,要实现工具的成功抓取,两架无人机机械臂之间的水平位移误差必须小于1.5厘米,形成了“近距离飞行”与“高精度操作”难以兼得的矛盾。
团队通过三大核心技术模块破解了这一难题。
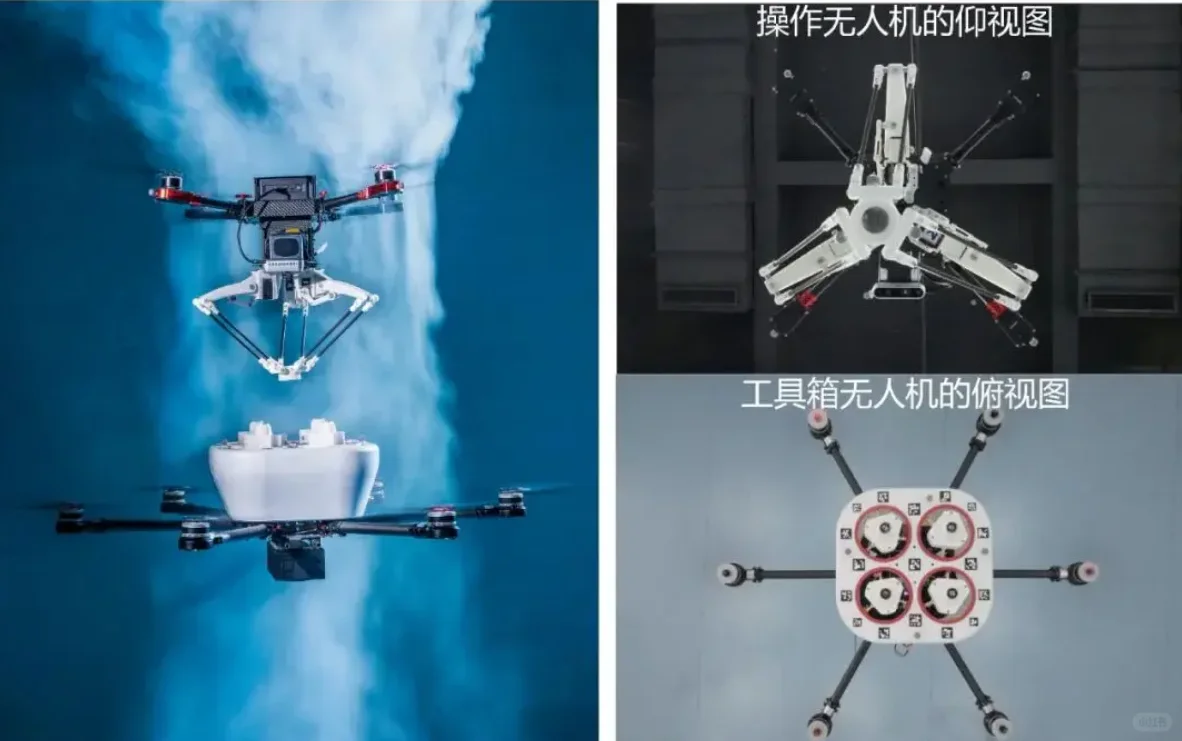
1.首先是柔性电磁对接机构。它在工具端设计了一个锥形电磁装置,与操作无人机机械臂末端的空腔结构通电后能自动吸附。该装置通过弹性系绳连接,具备“蹦床”般的柔韧性,能够容忍对接时产生的微小姿态偏移,实现了物理连接的自动吸附与容错。
2.其次是气流扰动估计与补偿方法。团队在下方无人机的控制系统中预置了气流模型,并结合神经网络算法,使其能够实时预测和估算上方无人机产生的复杂气流影响,从而提前调整自身旋翼转速进行主动抵消,如同为无人机安装了“抗干扰平衡器”。
3.第三是高精度对接与操作控制技术。上方的操作无人机通过机载视觉系统识别下方的二维码标签进行精准定位,而下方的工具箱无人机则根据实时感知的气流扰动,不断微调自身姿态。双方协同工作,确保了在整个对接过程中“看得清、飞得稳”。
这项技术的应用前景广阔。在未来,无人机集群可以像“空中乐高”一样,通过模块化组合执行复杂任务,例如替代人类进行高空高危环境下的设备检修、在灾难现场协作开展应急救援、甚至协同进行空中3D打印或建筑结构搭建。
#算法 #无人机操作 #无人机飞手 #无人机 #无人机驾驶 #低空经济
这项名为“飞行工具箱”的研究攻克了一个核心难题:当一架无人机飞至另一架正上方时,其螺旋桨产生的强烈下洗气流(相当于6级强风)会严重破坏下方无人机的稳定性。然而,要实现工具的成功抓取,两架无人机机械臂之间的水平位移误差必须小于1.5厘米,形成了“近距离飞行”与“高精度操作”难以兼得的矛盾。
团队通过三大核心技术模块破解了这一难题。
1.首先是柔性电磁对接机构。它在工具端设计了一个锥形电磁装置,与操作无人机机械臂末端的空腔结构通电后能自动吸附。该装置通过弹性系绳连接,具备“蹦床”般的柔韧性,能够容忍对接时产生的微小姿态偏移,实现了物理连接的自动吸附与容错。
2.其次是气流扰动估计与补偿方法。团队在下方无人机的控制系统中预置了气流模型,并结合神经网络算法,使其能够实时预测和估算上方无人机产生的复杂气流影响,从而提前调整自身旋翼转速进行主动抵消,如同为无人机安装了“抗干扰平衡器”。
3.第三是高精度对接与操作控制技术。上方的操作无人机通过机载视觉系统识别下方的二维码标签进行精准定位,而下方的工具箱无人机则根据实时感知的气流扰动,不断微调自身姿态。双方协同工作,确保了在整个对接过程中“看得清、飞得稳”。
这项技术的应用前景广阔。在未来,无人机集群可以像“空中乐高”一样,通过模块化组合执行复杂任务,例如替代人类进行高空高危环境下的设备检修、在灾难现场协作开展应急救援、甚至协同进行空中3D打印或建筑结构搭建。
#算法 #无人机操作 #无人机飞手 #无人机 #无人机驾驶 #低空经济