



主题概括
THEME SUMMARY
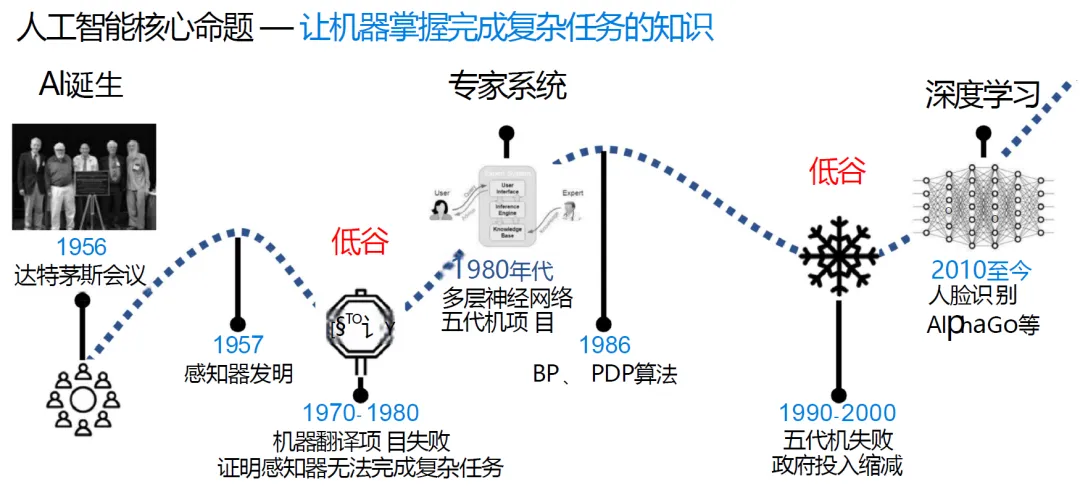
人工智能的核心命题,是让机器掌握完成复杂任务的知识。自 1956 年达特茅斯会议正式宣告人工智能学科诞生以来,其发展历程历经三次核心路线的迭代,逐步从专用化走向通用化,最终为 AI 智能体的崛起奠定了技术基础。

PART 01
人工智能发展的三大核心路线
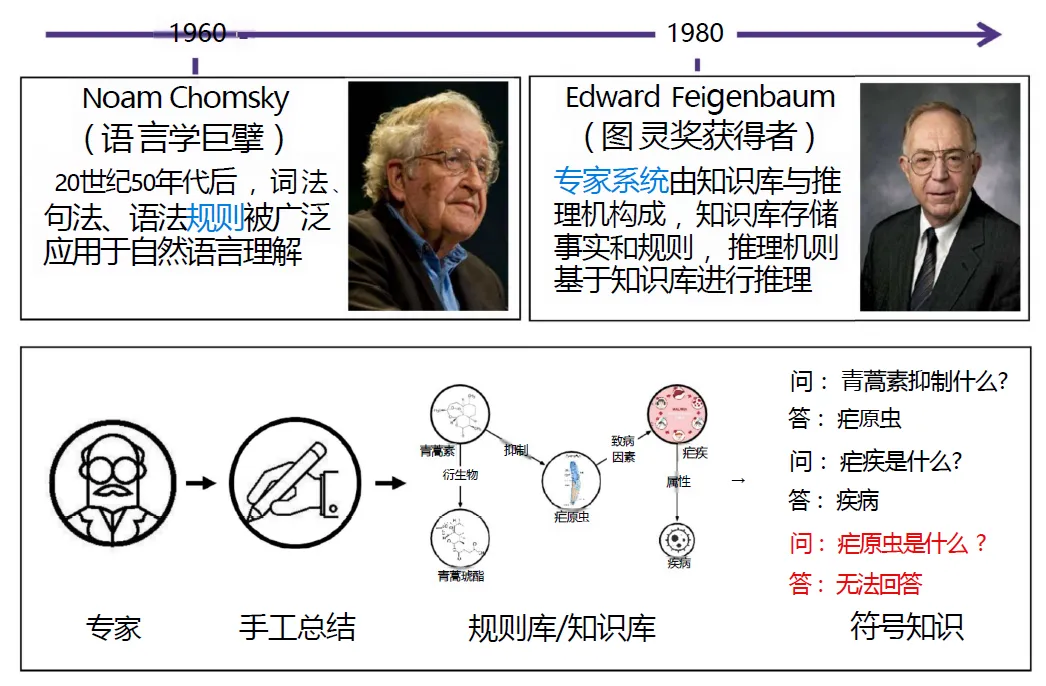
符号智能路线
符号智能是人工智能早期主流范式,依靠专家人工搭建规则、知识库,按既定逻辑求解问题。上世纪 50 年代该思路用于自然语言处理,80 年代费根鲍姆提出专家系统,标志符号智能落地成熟。
但其短板突出:知识与规则无法全部罗列,难以处理未收录的开放场景问题,适配复杂现实任务能力不足,后续发展陷入停滞。
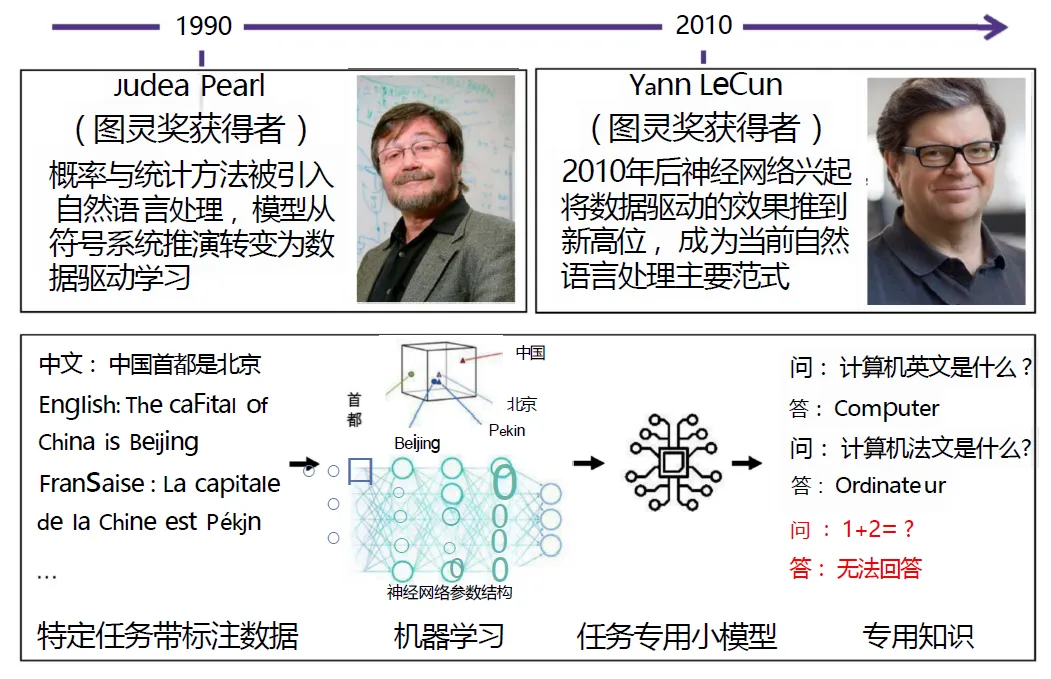
专用智能路线
专用智能以数据驱动机器学习为核心,依托特定任务标注数据自动学习并以小模型存储知识。90 年代统计概率方法推动 AI 从符号推演转向数据驱动,2010 年后神经网络成为 NLP 主流。
它解决了符号智能规则无法穷尽的问题,但缺陷明显:定制标注成本高昂,仅适配训练数据对应的场景,缺少跨领域通用能力。
通用智能路线
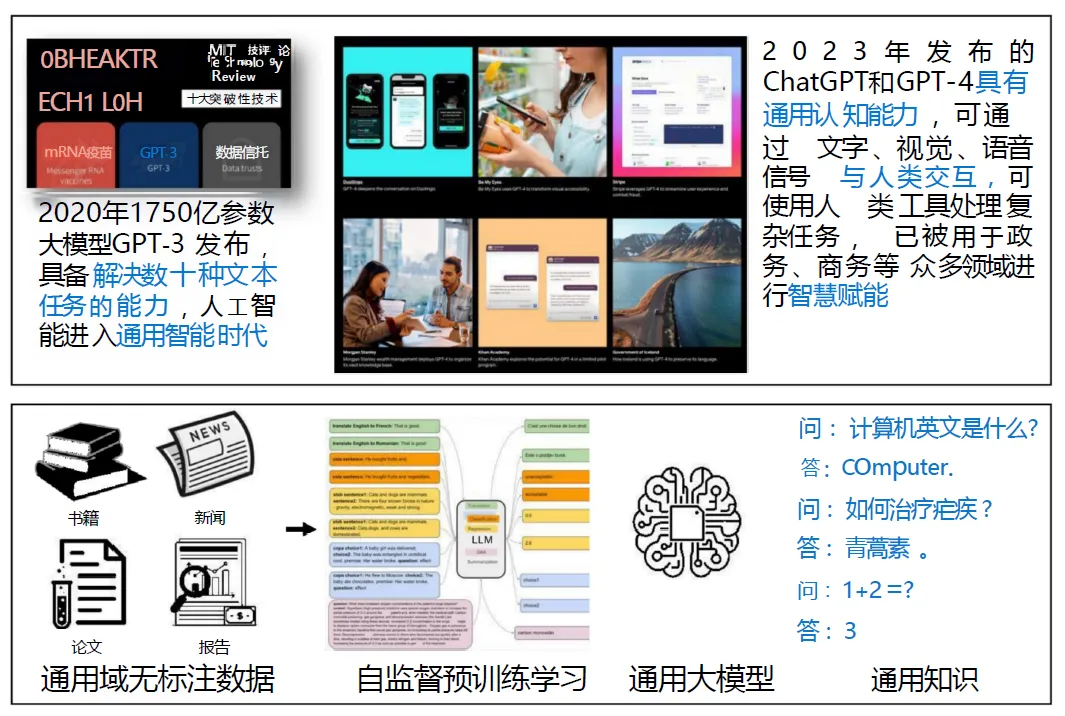
通用智能依托自监督预训练,从海量无标注通用数据中学习,依靠大模型承载知识。无标注数据获取成本低、储量充足,适配大规模知识存储。
2020 年 GPT-3 问世,可完成多类文本任务,宣告通用智能时代到来;2023 年 ChatGPT、GPT-4 落地,证实大模型拥有通用认知,支持多模态交互、调用工具处理复杂工作,广泛赋能各行各业。

PART 02
AI 智能体
智能体的核心定义
经典人工智能将智能体定义为可通过传感器感知环境、依靠执行器作用于环境的独立交互实体。
人类依靠五官感知、肢体发声行动;机器人以各类传感设备采集信息、电机完成动作;软件智能体读取文件、网络数据作为输入,通过输出文件、推送信息等完成环境交互。
数学层面,智能体函数负责把感知序列转化为对应动作;实体构成上,智能体等于硬件架构加运行程序,硬件提供传感执行载体,程序实现感知到动作的核心逻辑。
理性智能体的核心内涵
AI 依靠结果评判智能体行为,理性是判断行为好坏的核心。
理性智能体:结合感知序列与自身先验知识,选取能最大化期望性能指标的动作。理性由四点决定:性能度量标准、环境先验知识、可执行动作、历史感知序列。
理性≠全知完美:全知可预知真实结果,现实无法实现;理性最大化预期收益,完美追求实际最优。
理性智能体拥有自主性,可依靠感知、学习补足固有知识,不局限于预设规则。


PART 03
智能体的任务环境规范与属性
设计智能体首要步骤是明确任务环境,通用 PEAS 框架包含四项要素:性能度量、环境、执行器、传感器,以自动驾驶出租车为例可直观对应各模块内容。
任务环境按七大维度区分属性,复杂场景多兼具部分可观测、多智能体、非确定、序贯、动态、连续、未知特征:
完全 / 部分可观测:传感器能否获取环境全部状态,现实多为部分可观测;
单 / 多智能体:有无其他决策实体,多智能体需支持协作、博弈;
确定 / 非确定性:下一状态是否唯一确定,现实场景多非确定;
回合 / 序贯:当前动作是否长期影响后续决策,序贯环境更考验规划;
静态 / 动态 / 半动态:智能体思考时环境是否变动;
离散 / 连续:状态、时间、感知动作的取值形式;
已知 / 未知:智能体是否知晓环境运行规则,未知环境依赖自主学习。


PART 04
AIGC 与智能体的协同关系
AIGC与智能体技术各有侧重、相辅相成,是AI落地应用的重要组合,核心协同分为四点:
丰富交互内容:智能体依托AIGC生成多样化内容,优化对话、服务场景的用户交互体验。
辅助智能决策:智能体以AIGC产出的分析、预测、报告为依据,提升决策的全面性与准确性。
实现定制服务:智能体感知、学习用户偏好,联动AIGC生成个性化内容,适配资讯、教育、推荐等定制化场景。
分工协同作业:复杂任务中,AIGC负责内容创作与优化,智能体统筹全局的规划、决策与执行,二者配合完成复杂工作。


PART 05
智能体程序的四大基础类型
简单反射型智能体
最简单的智能体类型,仅根据当前感知选择动作,完全忽略感知历史的其余部分,仅适用于完全可观测的简单环境。
基于模型的反射型智能体
通过维护依赖感知历史的内部状态,追踪当前无法观测的世界部分,是处理部分可观测性的核心方案。其核心依赖两类知识模型:一是转移模型,描述世界如何随时间变化、智能体的动作会产生何种影响;二是传感器模型,描述世界状态如何反映在智能体的感知中。
基于目标的智能体
在环境状态模型的基础上,增加了描述理想情况的目标信息,通过模型与目标的结合,选择能够实现目标的动作,具备基础的规划与推理能力。
基于效用的智能体
在目标的二元判断基础上,通过效用函数对不同世界状态的优劣进行量化评估,选择能够最大化效用的动作,能够处理多目标冲突、不确定性环境下的决策问题,实现更高质量的行为输出。


聚焦企业级AI,助力智能运营解决方案
