手持无人机管控设备
链接:https://i-item.jd.com/100039683336.html
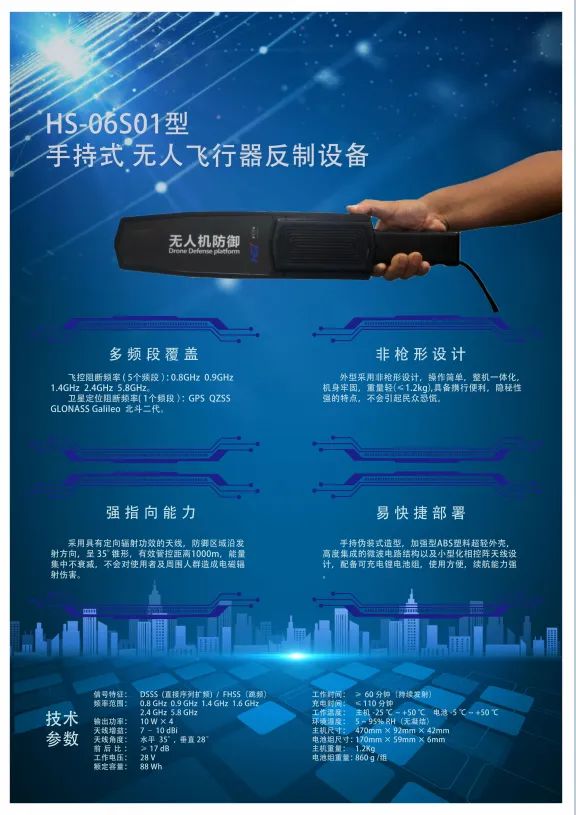
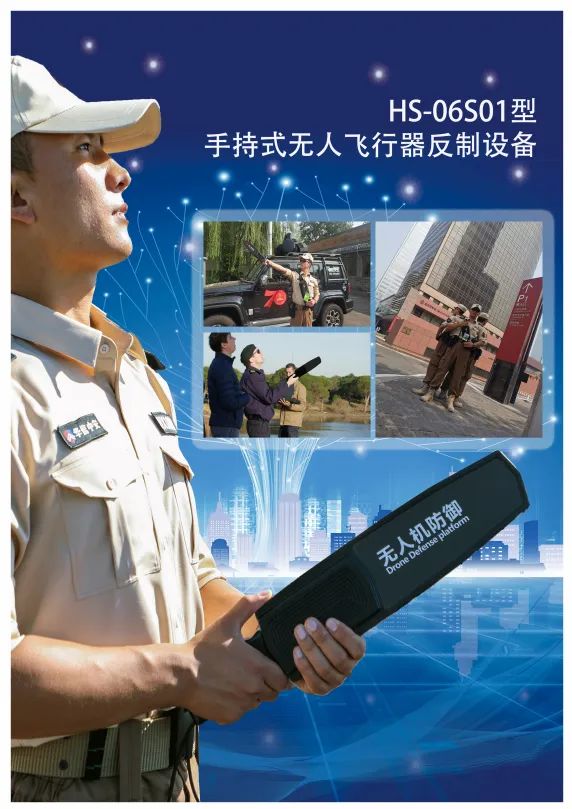
手持式无人机防御设备是一台通过发射高强度电磁波来阻断各类中小型民用无人机通讯系统,从而实现反制效果的专业防御设备。本设备支持0.8GHz / 0.9GHz / 1.4GHz / 2.4GHz / 5.8GHz五个频段的飞控阻断频率,以及1.6GHz GPS / QZSS / GLONASS / Galileo/北斗二代卫星定位阻断频率,可以使被管制无人机失控、返航、驱离、迫降或者坠毁。
本设备采用手持便携式设计,高强度航空铝CNC加工,高密度SMT表面贴装工艺,具有可靠性高,散热好,携带方便,防御距离远等特点。
产品清单:
项目 | 名称 | 数量 | 单位 |
1 | 手持主机 | 1 | 台 |
2 | 锂电池组 | 2 | 组 |
3 | 便携收纳包 | 1 | 套 |
4 | 电池包 | 2 | 套 |
5 | 充电器 | 1 | 个 |
6 | 充电器电源线 | 1 | 根 |
7 | 快速入门 | 1 | 份 |
1 基本操作
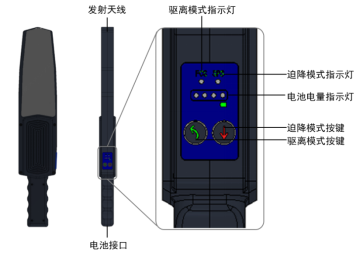
1.1 连接电池组到手持设备
将电池组的输出插头连接到手持设备底部的电池接口上。

1.2 对准目标方向
本设备采用具有定向辐射特性的天线,使用时需要将天线对准目标方向。
有关辐射方向性的描述见下图:


天线在正前方的辐射区域为25°左右的锥形区域,在距离200m处形成的辐射截面直径可以达到80米左右。在截面边缘区域的信号强度下降约3dB,直线作用距离大约降低到最大距离的70%。采用目视瞄准跟踪完全可以满足实际使用需求。
1.3 保持正确的天线极化方向
在使用时,要保持天线平面始终垂直于地面,如下图中所示。否则防御效果会大大降低。

| 说明: 天线的极化方向在实际防御操作中至关重要,不正确的天线极化方向,会使产生作用的干扰信号强度降低至十分之一。请在使用时保持发射天线平面垂直于地面。 |
1.4 选择工作模式并发射干扰信号
1.4.1 工作模式
设备具备两种工作模式:驱离模式和迫降模式。
·驱离模式:将目标无人机驱离当前区域。
·迫降模式:使目标无人机失控坠落或自动迫降。
| 说明: · 驱离与迫降的实际效果,取决于目标无人机的程序设计,不同的设计会有不同的反应。如何选择工作模式,请仔细阅读下面关于两种模式的详细原理和使用说明。 · 无人机在受到干扰后,短时间内会悬停静止不动,等待飞控及卫星信号的恢复,这也是其最基本的抗干扰措施。不同的无人机,对于受到干扰后执行下一步动作之间的等待时间不同,但一般都在3~15秒之间。 |
1.4.2 驱离模式
1 适用场景
驱离模式适用于大型户外娱乐场所、公园、演唱会、体育比赛、影视拍摄现场等人员密集,涉密性不强的场合,主要防止无人机坠落伤人。
2 原理
驱离模式是通过发射电磁波阻断目标无人机和遥控器之间的飞控信道,使目标无人机处于失联状态,让其执行返航程序,从而离开管制区域。
3 操作
1.按下驱离模式的按键,直至听到每秒5次的“滴-滴”声,表明设备已经发射电磁波干扰信号。此时,驱离模式红色指示灯同步点亮。
1.在发射干扰信号以后,如果无人机继续运动,应该在保持发射的同时随时跟踪其运动轨迹,尽量保持天线方向始终对准无人机。如果无人机脱离管制设备的有效防御范围,只需几秒钟的时间,即可重新与遥控器建立联系,因此在管制目的达到之前,最好一直保持跟踪。
2.松开按键,“滴-滴”声停止,所有指示灯熄灭,表示设备已经停止工作。
4 效果
驱离模式下,无人机的飞控信道将被阻断。无人机的飞控信道被阻断后的反应与无人机的飞控程序设计有关。对于大多数无人机来说,飞控信道被阻断后的效果与遥控器关机或遥控器电量耗尽的效果一致。一般来说这种情况下,设计完善的无人机将在等待一段时间(3~20秒)后,执行返航程序,即根据起飞时记忆的位置返航。根据设置不同,无人机可能会先垂直运动达到设定的返航高度然后返航。对于一些玩具级的无人机而言,如果没有卫星定位模块和自动返航功能,也可能会原地降落甚至空中停机坠落(仅见于超轻型的低成本玩具无人机)。
| 说明: 驱离模式可以与迫降模式配合使用。根据实际需要,可以将无人机驱离到合适位置再进行迫降。 |
1.4.3 迫降模式
1 适用场景
迫降模式适用于重要活动安保、突发事件现场、涉密单位安保、重要政府机关、部队、监狱、看守所等涉密性强的场合。主要用来防止无人机航拍资料泄露,或者防止无人机携带物品产生危害,希望缴获无人机及其内部存储资料或携带的物品。
5 原理
迫降模式就是通过发射电磁波阻断目标无人机和遥控器之间的飞控信道以及卫星定位信号,使目标无人机处于失联状态,同时无法通过卫星定位执行返航程序,从而自由漂移撞击障碍物坠落或者执行原地降落程序,或者悬停电池耗尽自行降落。
6 操作
1.按下迫降模式的按键,直至听到每秒5次的“滴-滴”声,表明设备已经发射电磁波干扰信号。此时,迫降模式红色指示灯同步点亮。
3.在发射干扰信号以后,如果无人机继续运动,应该在保持发射的同时随时跟踪其运动轨迹,尽量保持天线方向始终对准无人机。如果无人机脱离管制设备的有效防御范围,只需几秒钟的时间,即可重新与遥控器建立联系,因此在管制目的达到之前,最好一直保持跟踪。
4.松开按键,“滴-滴”声停止,所有指示灯熄灭,表示设备已经停止工作。
7 效果
迫降模式下,无人机的飞控信道和卫星定位信号将被阻断。无人机的飞控信道和卫星定位信号被同时阻断后的反应与无人机的飞控程序设计有关。一般来说这种情况下,设计完善的无人机将在等待一段时间(3~15秒)后,执行保护程序,即原地悬停后自主降落。但是对于目前的无人机设计技术而言,在没有卫星定位辅助的情况下,悬停无法保障,会由于机身和多旋翼的动力不对称性而产生比较大的漂移,尤其是风速带来的漂移尤为严重,最高可以达到每秒数米。这种情况下,即便是具有避障功能的机型也无法避免坠机。(避障功能都是针对于正前方大约水平60°视角以及垂直30°视角范围内的障碍物)一些玩具级的无人机因为没有卫星定位功能,迫降模式的效果将会与驱离模式一样。
| 说明: 迫降模式可以与驱离模式配合使用,根据实际需要,可以将无人机驱离到合适位置再进行迫降。 |
、