


这几年,UWB 在汽车上的存在感越来越强。很多人第一次接触它,是从“数字钥匙”开始的:手机靠近车辆,车能判断你的位置,自动解锁;坐进车内后,系统还能确认钥匙在车内,而不是车外。这背后用到的,就是 UWB 的高精度测距和定位能力。
但如果同一套 UWB 硬件,不只用来判断“钥匙在哪里”,还能判断“车里有没有人、有没有呼吸”呢?
Ceva 最近发布的白皮书《Robust In-Cabin Vital Signs Monitoring Using UWB Radar》讨论的就是这个方向。它提出了一套比较务实的方案:复用已经部署在车辆中的 UWB 数字钥匙天线和射频链路,通过软件定义雷达和信号处理,把原本用于安全定位的 UWB 系统,扩展成车内生命体征监测传感器。
这件事的吸引力不在于“UWB 又多了一个应用”,而在于它很符合汽车工程里的现实逻辑:不新增专用雷达,不额外增加 BOM,不依赖摄像头成像,同时还要能在停车低功耗场景下持续工作。对于儿童遗留检测、车内人员存在检测这类安全功能来说,这种思路比单纯堆传感器更值得讨论。
下面我们就顺着这篇白皮书,看看 UWB 是怎么从数字钥匙变成车内雷达的,以及它如何在发动机振动、多径反射、非高斯噪声这些真实车内干扰下,提取出呼吸和心跳微动。

为什么 UWB 适合做车内生命体征监测?
车内生命体征监测最难的地方,不是“有没有信号”,而是信号太乱。
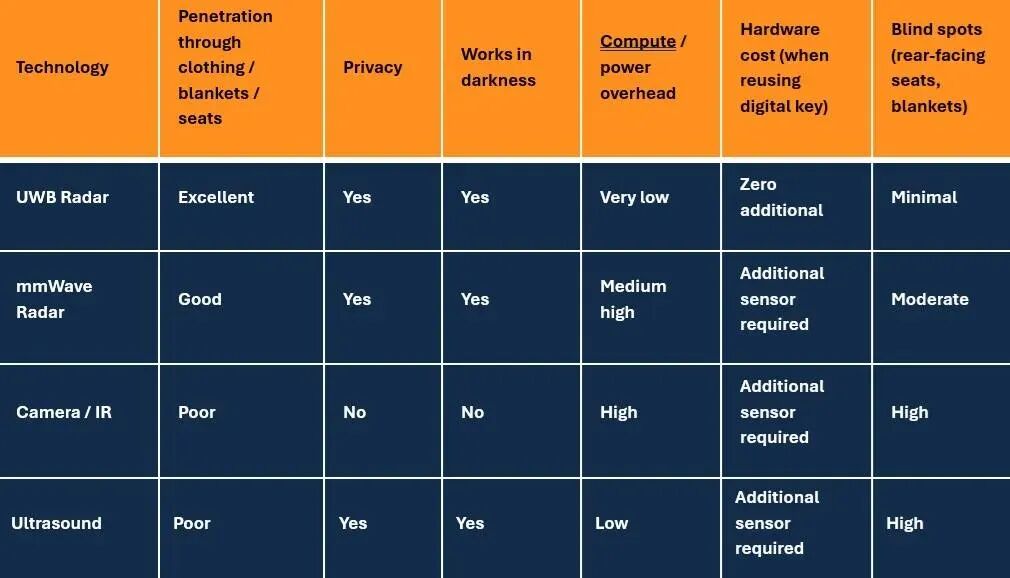
人的呼吸和心跳带来的胸腔位移非常小,心跳相关的微动甚至可能是亚毫米级别。但车内环境里有座椅、玻璃、仪表台、乘员身体姿态、发动机振动,还有各种电子系统带来的噪声。摄像头方案受光照和隐私限制,传统 mmWave 雷达又意味着额外硬件、额外成本和额外集成工作。
UWB 的特别之处在于,它本来就是靠极短脉冲和宽带信号做高精度测距。白皮书中提到,UWB 脉冲工作带宽超过 500 MHz,脉冲尺度在纳秒级,因此具备很细的时间分辨率。换到雷达视角看,这意味着它可以在距离维度上把不同反射区域分开,找到更接近乘员胸部的位置,而不是只看到一团混在一起的车内反射。
和单纯依赖多普勒的雷达相比,UWB 不只是看速度变化,还能利用细粒度的距离信息做空间隔离。对于车内这种小空间、多反射的环境,这一点很重要。
这套方案真正省下来的是什么?
白皮书反复强调“硬件复用”,这不是一句营销话。
现代车辆里,UWB 已经用于安全定位相关功能,例如数字钥匙和安全被动进入。Ceva 的方案是复用这些生产级 UWB 天线和 RF 链路,通过软件定义的方式增加雷达感知能力。
这样做带来几个直接好处:
第一,不需要新增专门的车内雷达传感器,BOM 成本可以做到几乎不增加。
第二,系统集成复杂度降低。因为天线、射频链路、MAC/PHY 生态原本已经围绕数字钥匙在车上部署。
第三,低功耗场景更容易成立。儿童遗留检测往往发生在车辆停车、熄火、低功耗模式下。如果还要额外唤醒一套重传感器系统,功耗和架构都会变复杂。UWB 本身适合做 always-on 低功耗检测。
第四,隐私压力较小。它检测的是反射信号中的微动,而不是形成图像,不涉及摄像头那类可识别画面。
从数字钥匙到雷达:信号是怎么来的?
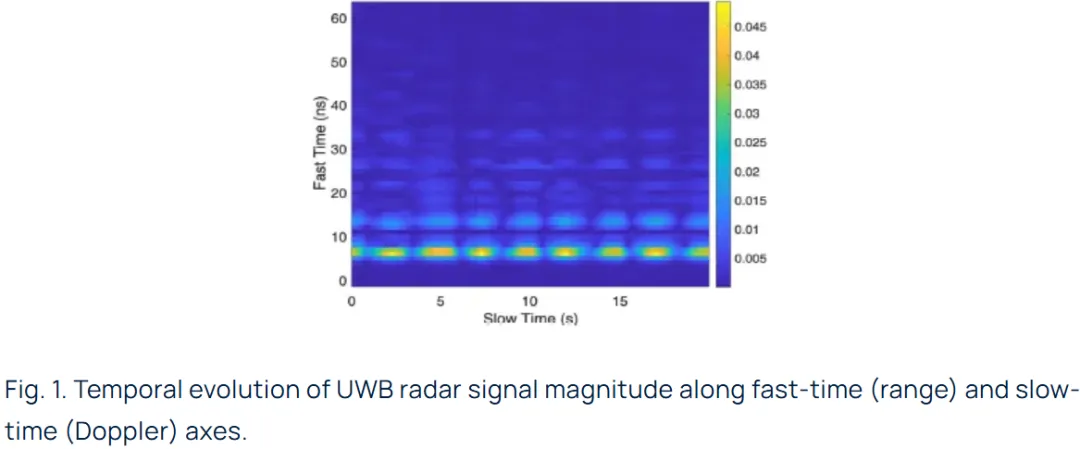
在雷达模式下,UWB 收发器发射一串 impulse-based pulses,也就是基于脉冲的超宽带信号。信号碰到人体、座椅、玻璃、仪表台等物体后发生反射,接收端把这些反射转换成 Channel Impulse Response(CIR,信道冲激响应)。
CIR 可以理解成车内空间反射的一条“时间剖面”:不同延迟对应不同距离,不同反射强度对应不同物体或身体部位的反射贡献。由于 UWB 的时间分辨率高,系统可以在 fast-time,也就是距离维度上寻找主要反射峰,进而定位到乘员胸部附近的反射区域。
这一步叫 spatial gating,空间门控。它的作用不是立刻算呼吸和心跳,而是先把注意力集中到最可能包含生命体征微动的位置,尽量避开静态座椅、车窗和车内结构件的反射。
接下来,系统沿 slow-time,也就是连续观测时间维度处理信号。呼吸和心跳不是一次性事件,而是随时间周期性变化的微小位移。系统会对 slow-time 信号做高通滤波,压制静态杂波,把有节律的微动成分留下来。
车里的人不会一直静止:RBM 检测为什么必要?
生命体征雷达怕的不是人完全不动,而是人突然大幅动一下。
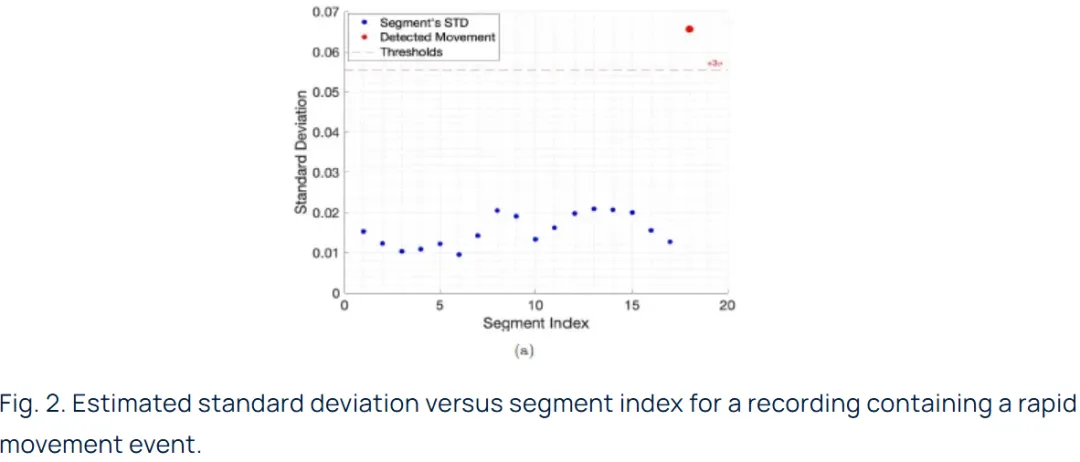
比如乘员转身、伸手、调整坐姿,都会带来比呼吸和心跳强得多的瞬态运动。这样的 rapid body motion(RBM,快速身体运动)如果直接进入频谱估计,会造成频谱泄漏,呼吸峰和心跳峰都会被污染,心率跟踪也容易跳变。
白皮书中的处理方式很直接:把 slow-time 信号切成重叠窗口,然后对每个窗口计算基于方差的运动指标。某个窗口的方差超过阈值,就认为这段存在 RBM,暂时从生命体征估计中剔除。
这一步很像给算法加了一个“不要在大幅运动时硬算心跳”的判断。工程上这很重要,因为真实车内不会像实验室一样安静。
真正的难点:从混合反射里分离呼吸和心跳
做完空间门控和 RBM 过滤之后,信号仍然不是干净的。
呼吸、心跳、发动机振动、电子噪声、多径反射会混在一起。尤其车内雷达信号常常带有 impulsive noise 和 heavy-tailed noise,也就是冲击型、重尾分布的噪声。传统假设“噪声接近高斯分布”的处理方法,在这种场景下容易变差。
Ceva 白皮书采用的是 measure-transformation(MT,测度变换)思路。它的做法是对原始数据测度施加非负变换,降低高能离群点的影响,同时尽量保留做源分离和跟踪所需的相关结构。
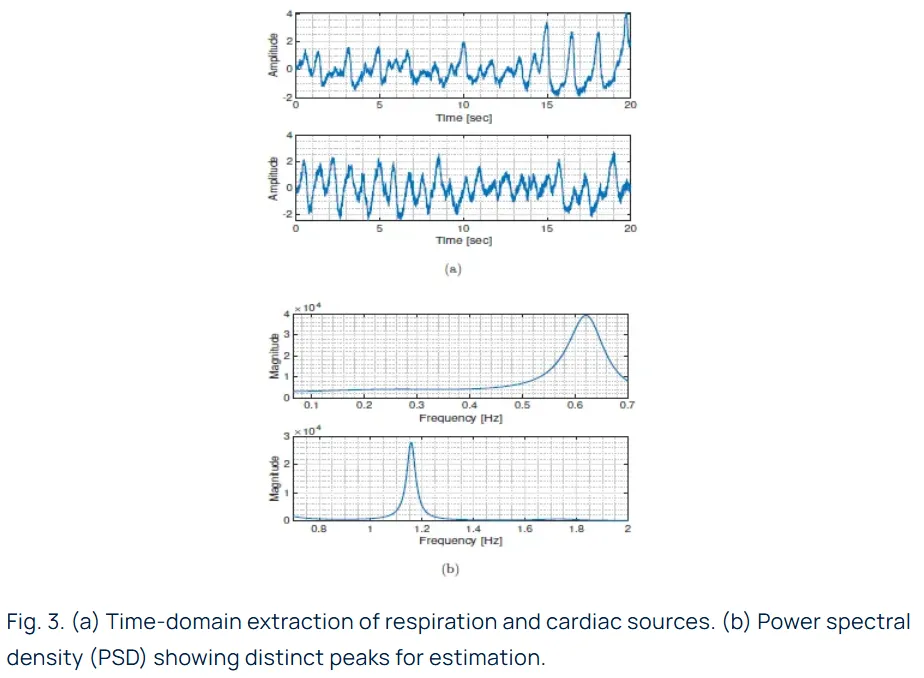
在源分离上,方案使用 MT-SOBI,也就是 measure-transformed second-order blind identification。SOBI 本身是一类基于二阶统计特性的盲源分离方法,用来把混合信号拆成相对独立的源。加上 MT 后,它更适合处理车内这种非高斯、强干扰环境。
拆出来的源主要对应两类生理活动:呼吸和心脏微动。
连续跟踪部分则使用 MT-RLS,也就是 measure-transformed recursive least squares。RLS 是递归最小二乘,适合在线更新和跟踪变化信号;MT 的加入,是为了在非平稳干扰和车辆振动下保持稳定。
这里比较有意思的是,白皮书不是只靠“UWB 分辨率高”来讲故事,而是把鲁棒信号处理放到了核心位置。因为在车内,能不能看到胸部微动只是第一步,能不能在噪声和运动干扰里稳定分离出来,才决定方案能不能落地。
实验怎么验证?
白皮书的验证场景是生产车辆座舱,并且发动机处于怠速状态。这一点比静态实验更接近真实使用环境,因为发动机振动、车内多径和电子噪声都会存在。
信号经过源分离之后,再用 MUSIC 算法做谱分析。MUSIC 是一种高分辨率频谱估计算法,常用于从信号中找出主要频率成分。对于生命体征监测来说,频率峰值对应的就是呼吸频率和心跳频率。
系统调谐的频率范围如下:
呼吸:0.06–0.7 Hz,也就是 3.6–42 BPM。心脏活动:0.75–2 Hz,也就是 45–120 BPM。
Euro NCAP 对儿童遗留检测中“睡眠新生儿呼吸”的关注范围是 18–30 BPM。白皮书中的呼吸检测范围完整覆盖了这个区间,也就是说,它不仅能检测成年人较明显的呼吸,也把浅呼吸的新生儿场景纳入了设计目标。
Ceva-Waves UWB IP 在这里扮演什么角色?
白皮书中的验证平台是 Ceva-Waves UWB。它不是单纯的雷达芯片描述,而是一个面向车规和连接场景的 UWB IP 平台。
文中提到的关键能力包括:
支持 IEEE 802.15.4z 和 IEEE 802.15.4ab,并与 FiRa 4.0、CCC Digital Key 4.0 对齐。这意味着它可以和现有数字钥匙、安全测距体系结合。
具备原生 UWB Doppler Radar 模式,面向车内 Child Presence Detection(CPD)和 Human Presence Detection(HPD),可检测呼吸微动。白皮书还提到相关验证中展示过小于 1 BPM 的分辨率能力。
接收机采用高级相干架构,强调 Wi-Fi 干扰抑制和复杂多径环境下的鲁棒性。
在测距模式下支持厘米级 ToF 和 AoA 精度;切到雷达感知时,借助宽带脉冲和信号处理,可以进一步支撑亚厘米级的微动解析。
此外,平台强调低功耗、硬件卸载和 CPU-agnostic 软件栈。后者意味着它不是绑定某一种主控 CPU,而是可以围绕 FiRa MAC、CCC Digital Key MAC 和雷达扩展栈部署到不同汽车 SoC 上。
这项工作的价值,不只是“检测呼吸”
如果只看结果,很容易把这篇白皮书理解成“UWB 也能测呼吸心跳”。但更值得关注的是它背后的架构思路:连接硬件和感知能力开始合并。
过去车上的无线连接、定位、雷达感知往往是不同系统。数字钥匙负责进车,毫米波雷达负责感知,摄像头负责识别。现在 UWB 的部署量上来以后,原本用于安全测距的硬件,有机会通过软件升级承担一部分车内感知任务。
这对 OEM 和 Tier-1 的吸引力很直接:少一个传感器,就少一份成本、安装位置、线束、标定、功耗和维护复杂度。尤其 CPD 这类法规和安全需求,往往要求“长期在线、低功耗、可靠检测”,UWB 的低功耗和非成像属性刚好比较匹配。
当然,白皮书没有展开更多大规模数据细节,例如不同座位、不同体型、多人同车、厚衣物、复杂姿态下的统计指标。对于量产系统来说,这些仍然是必须验证的部分。但从方法链路看,它已经把几个关键难点串起来了:硬件复用、空间门控、RBM 剔除、MT 源分离、频谱估计和在线跟踪。
技术总结
这篇白皮书的技术路线可以压缩成一句话:用现有 UWB 数字钥匙硬件发射脉冲,通过 CIR 获取车内反射,再用空间门控锁定胸部区域,沿 slow-time 提取微动信号,剔除快速身体运动后,用 MT-SOBI 和 MT-RLS 在非高斯噪声环境下分离并跟踪呼吸、心跳,最后通过 MUSIC 谱分析得到生命体征频率。
它的关键不是单点算法,而是系统组合:
UWB 提供高时间分辨率和距离分辨率,解决“看哪里”的问题。空间门控和高通滤波解决“从静态车内结构里把人体微动拿出来”的问题。RBM 检测解决“人突然动一下时不要误判”的问题。MT-SOBI 和 MT-RLS 解决“车内噪声不是理想高斯噪声”的问题。MUSIC 谱分析解决“从分离信号里稳定读出频率峰”的问题。
从工程角度看,这类方案真正有价值的地方,不是多做了一个生命体征 demo,而是把已经进入汽车的 UWB 连接基础设施,变成了可复用的安全感知平台。数字钥匙负责让车知道“谁来了”,UWB 雷达则进一步让车知道“车里是否还有人,以及这个人是否有生命体征”。这才是这篇白皮书最值得关注的地方。