导读:

SerDes 技术原理与关键技术
一、基础原理
SerDes(Serializer/Deserializer)是高速串行收发核心技术,完成并行→串行(发送正向)、串行→并行(接收反向)的转换,解决高速互联的引脚、时序、带宽与信道损耗问题。
1. 正向传输
正向传输指从并行数据输入到高速差分信号输出的完整链路,核心目标:高吞吐、低 ISI、易同步、抗干扰。
1.1 传输速率与调制方式
1)传输速率
线速率 = 并行位宽 × 并行时钟频率,高速 SerDes 以 Gbps 为单位,典型覆盖 10G/25G/56G/112G。
并行转串行后,符号速率(波特率)决定物理层带宽,是调制与编码的基础约束。
2)调制方式(电平映射)
调制是将编码后符号映射为物理电平,决定频谱效率与抗噪能力。
NRZ(PAM2):两电平,1bit / 符号,比特率 = 符号率;适用于≤28Gbps,眼图张开大、实现简单。
PAM4:四电平,2bit / 符号,相同符号率下带宽效率翻倍;适用于 56G/112G,电平间距更小、对噪声与均衡更敏感。
调制方式直接决定符号率与线速率的关系以及信道设计余量。
1.2 信号编码
编码在并串转换前完成,解决时钟恢复、直流平衡、误码检测问题:
8b/10b:8bit 映射为 10bit,限制最长连 0 / 连 1,保证足够跳变沿供CDR 锁定,直流平衡好,带冗余检错。
64b/66b:64bit 加 2bit 同步头,开销更低(≈3%),用于高速以太网 /PCIe,配合扰码打散长连 0/1。
扰码 Scrambling:伪随机化比特流,避免频谱集中、减少 EMI 与长串稳态。
编码不改变电平类型,只为可靠传输与同步服务。
1.3 信号调制
调制将编码符号转为可传输的差分模拟波形,包含发送端信号调制:
并串转换 Serializer:高速时钟将并行数据转换为串行数据。
DAC/电平驱动:按 NRZ/PAM4 规则输出对应的差分电平。
发送端预加重/去加重:提前补偿信道高频损耗,抑制码间干扰。
差分驱动:LVDS/CML 等差分输出,抗共模干扰、适配 PCB/背板/线缆信道。
调制最终输出带预补偿的高速差分信号进入信道。
2. 反向传输
反向传输指从信道差分输入到恢复并行数据输出,核心是信号复原、时钟提取、判决解码。
1)前端放大与均衡
CTLE 连续时间线性均衡:补偿信道高频衰减。
DFE 判决反馈均衡:消除后 cursor ISI,适配 PAM4 多电平判决。
2)时钟数据恢复 CDR
从数据跳变沿提取符号时钟,完成最佳采样点对齐;以 DPLL/相位插值实现频率捕获与相位跟踪,是无单独时钟线的 SerDes 同步核心。
3)符号判决与解调
按 NRZ/PAM4 阈值对采样电平做符号判决,还原比特流。
4)解码与解扰、串并转换
解除 8b/10b/64b/66b 与扰码,恢复原始并行数据,输出到系统侧。
反向传输本质是正向链路的逆过程加信道损伤补偿,实现高速串行信号的可靠还原。
3. 插损补偿
在车载 SerDes 高速链路设计中,信道插损补偿是确保信号完整性的核心技术。高频信号的衰减会导致信号边沿变缓、眼图闭合,并产生码间干扰,从而增加误码率。因此,高速 SerDes 系统需要通过插损补偿技术来恢复信号频谱并提高链路可靠性。
插损补偿通常通过发送端和接收端均衡协同实现。发送端均衡一般采用前馈均衡技术,通过对信号进行预加重来增强高频分量,使信号在通过信道后仍能保持较好的频谱特性。
在接收端,常见的均衡方式包括连续时间线性均衡和判决反馈均衡。连续时间线性均衡位于模拟前端,通过在高频段提供更高增益来补偿信道衰减,但同时会放大噪声。判决反馈均衡利用已判决数据对当前符号进行补偿,主要用于消除后游标码间干扰,并且不会放大噪声。
考虑到车载环境中温度变化、线缆长度和电磁干扰等因素,现代 SerDes 系统通常采用自适应均衡技术,通过链路训练动态调整均衡参数,从而在不同信道条件下保持稳定的传输性能,提高高速数据链路的可靠性。
二、关键技术
1. 安全与冗余
1.1 功能安全
汽车可能面对恶劣的运行环境,温度范围从-40℃到 125℃,持续振动,电磁干扰强烈。这些因素使得车载芯片面临前所未有的硬件失效和系统性失效风险。为确保汽车在严苛的运行环境中,即使发生电子电气系统故障,也能避免造成人身伤害,功能安全(Function Safety, FS)已成为汽车芯片设计的强制准入门槛。常用的功能安全标准有国际标准 ISO 26262 和国标 GB/T 34590。
ISO26262 的核心工具是危害分析与风险评估(Hazard Analysis and Risk Assessment, HARA),产出是汽车安全完整性等级(Automotive Safety Integrity Level, ASIL)。HARA 是一个系统化分析过程,旨在回答三个问题:什么会出错,有多严重,发生的可能性多大。首先,系统梳理所有可能的功能异常及其在特定运行条件下可能导致的危害事件。然后,对每个危害事件,从三个维度进行评估。严重度(S):潜在伤害的严重程度,从 S0(AIS0 及 AIS1-6 可能性小于 10%)到S3(AIS5-6 可能性大于 10%)。暴露度(E):危害事件发生的概率,从 E1(对绝大多数驾驶员小于一年发生一次)到 E4(平均几乎发生在每次驾驶中)。可控性(C):驾驶员或其他交通参与者避免伤害的难易程度,从 C0(常规可控)至 C3(少于 90%能够或者勉强能够避免伤害)。再次,综合 S, E, C 三个参数的评定结果,通过标准矩阵确定该危害事件对应的 ASIL 等级,从低到高分为 A, B, C, D。ASILD 代表最高风险等级,要求最严格的安全措施。
1.2 热插拔
在车辆维护或生产过程中,摄像头或显示模块可能在系统上电状态下连接或断开,即热插拔。在车载 SerDes 系统中,PoC(Power over Coax)技术被广泛使用于摄像头与系统的连接,PoC 链路本身就通过同一根线缆同时传输电源和高速数据。热插拔技术允许系统在不切断主电源的情况下,安全地连接或断开外设,不干扰当前活跃数据线上的数据传输。典型场景包括:ECU 已上电时插入模块,车辆震动导致瞬时接触不良等情况。SerDes 系统必须支持热插拔。
尽管热插拔具备诸多优势,但其在汽车 SerDes 应用中仍面临若干挑战,车载 SerDes 工作在高速且复杂的电磁环境下,热插拔过程主要存在瞬态电压,静电放电和造成物理链路抖动的风险。硬件设计建议包含输入保护电路,自动链路恢复,电源时序独立,短路 / 开路容忍等功能。为确保热插拔过程的稳定性,需参考国际标准如 ISO 11451-2。对于 ESD 放电测试,需要遵循 ISO 10605 标准。对于 PoC 系统的测试,可参考 ISO 7637 标准,其适用范围包括 8 种瞬态脉冲如抛负载脉冲,要求系统耐受 12V 或 24V 干扰,以确保热插拔过程的鲁棒性。
2. EMC/EMI 抑制
车载芯片的应用场景对电磁兼容性(EMC)提出苛刻的要求。EMC 指元器件能在电磁环境下正常工作。电磁干扰(EMI) 则指元器件正常工作时对外发射的电磁场,系统整机要求将元器件 EMI 抑制到可以接受的程度。为了有效抑制 SerDes高速信号产生的高频电磁辐射,其内部的锁相环(PLL)通常会采用展频时钟(Spread Spectrum Clock, SSC)技术。同时汽车本身也是电磁干扰源,车载SerDes 的 EMC 问题通常不是单一器件导致,而是“芯片—PCB—连接器—线缆—车身接地”链路整体的共模路径与回流路径管理问题,需要多层面协同优化,车载 SerDes 的 EMC 测试项与其对应的标准如表 2-1 所示。
表 2-1 车载 SerDes 的 EMC 测试项与其对应的标准表

3. FEC 的特点与应用场
采用(Forward Error Correction, FEC)技术时,发送端在发送码元(symbol)序列中加入差错控制码元。接收端利用差错控制码元,不仅可以检测一定数量的错误码元,还可以纠正一定数量的错误码元。常用的 FEC 编码有 BCH 码,RS 码,Turbo 码,LDPC 码等。车载 SerDes 领域常采用 RS 码。
RS 码以发明人 Reed 和 Solomon 的名字命名,是一种多进制 BCH 码。RS 码建立在伽罗华域(Galois Field, GF)之上,通常使用 GF(2m)。如图 2-1 所示,每个 symbol 由 m bits 表示。发送码元序列有 k symbols,加入差错控制码元序列(n-k) symbols,总共组成 n symbols。该 RS 码可以检测(n-k) symbols 错误,可以纠正(n-k)/2 symbols 错误。
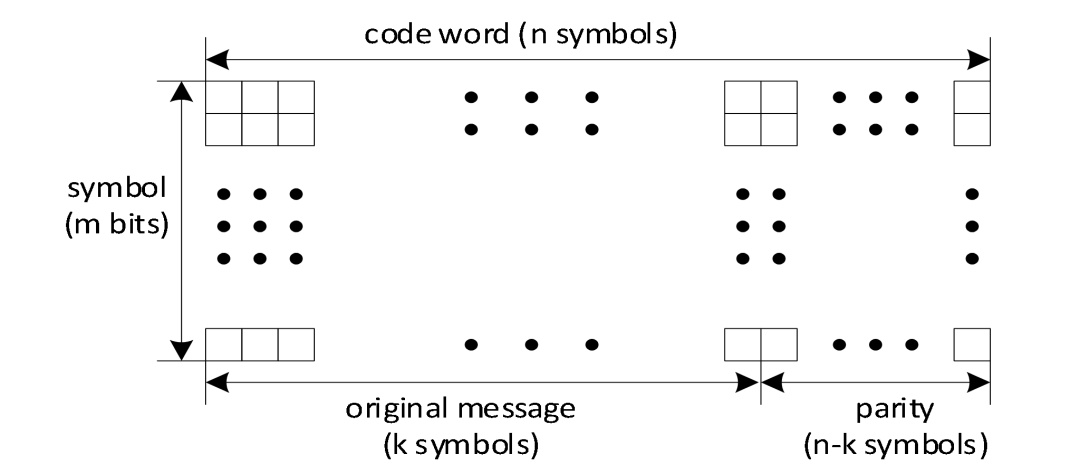
图 2-1 RS 码示意图
RS码的纠错单位是symbol,一个symbol中只要有任何bit出错,整个symbol即被认为出错。因此,一串连续 bits 错误很可能只破坏少数几个 symbols。所以,RS 码以相对较低的冗余度,可以高效地纠正长突发错误。同时,加入(n-k)symbols 的差错码元后,RS 码在纠正错误方面达到了 singleton 界,是理论上的最优码之一,实现了纠错能力和编码效率的平衡。
RS 码在多个车载 SerDes 协议中得到了应用。例如,HSMT 协议正向链路采用RS-FEC(384, 354, 9),反向链路采用 RS-FEC(73, 69, 8)。ASA 协议正向链路在G1-G2速率下采用RS-FEC(216, 214, 8),G3-G5速率下采用RS-FEC(240, 214, 8),反向链路采用 RS-FEC(108, 106, 8)。
4. 自动重传
在车载 SerDes 系统中,高速数据链路需在复杂电磁环境和较长传输距离条件下保持低误码率。尽管物理层均衡与编码技术已显著降低误码,但在实际应用中仍不可避免地存在瞬态错误,例如电磁干扰、连接器不稳定、电源噪声及温度变化引起的信号抖动。因此,仅依赖物理层优化难以完全消除误码,系统通常引入自动重传机制(Automatic Retransmission)以提升可靠性。
自动重传机制基于 ARQ 思想,在数据传输过程中为每个数据帧附加错误检测信息。接收端对数据进行校验,若检测到错误,则通过反向控制通道向发送端请求重传,发送端重新发送对应数据帧,从而在有限开销下有效纠正随机错误并降低系统级误码率。
在车载 SerDes 中,该机制通常与 CRC 校验结合使用。发送端在数据帧中加入 CRC 校验码,接收端重新计算并比对,一旦不一致即触发重传请求。依托 CRC对随机错误的高检测能力,可有效保障数据完整性。
系统通常采用高速正向链路与低速反向链路的双向结构,其中反向链路用于承载控制与重传请求。为降低对实时性的影响,协议一般采用小数据帧结构并结合流水线处理机制,以减少重传带来的延迟。
在视频显示应用中,实时性要求较高,因此自动重传通常采用有限重传策略,仅对部分错误帧进行恢复,以避免链路长时间阻塞。同时,在部分场景下允许少量错误帧丢弃,以保证画面连续性。随着链路速率提升至十几 Gbps 甚至更高,瞬态误码影响更加显著,自动重传在系统稳定运行中发挥关键作用。
总体而言,自动重传通过与 CRC 和反向链路配合,在不显著增加复杂度的前提下提供有效的错误恢复能力,是保障车载高速视频传输可靠性的关键机制。
5. 均衡
在在高速串行通信中,信号经过电缆和连接器传输时会受到信道损耗影响,尤其是高频分量衰减明显,从而导致接收端波形失真并产生码间干扰(ISI),进而增加误码率。因此,车载 SerDes 系统必须采用信道均衡技术进行补偿。
均衡的核心是对信号频率响应进行调整,使信号在通过信道后恢复接近原始形态,从而改善眼图开度并提高判决可靠性。根据实现位置不同,均衡可分为发送端均衡与接收端均衡。
发送端通常采用预加重(Pre-emphasis)或去加重(De-emphasis)技术,通过增强高频分量来补偿信道衰减。该方法实现简单、功耗较低,可通过调节驱动电流或脉冲响应实现。
接收端常见均衡技术包括连续时间线性均衡器(CTLE)和判决反馈均衡器(DFE)。CTLE 通过调整模拟放大器的频率响应提升高频信号,结构简单且功耗较低;DFE 则利用历史判决结果消除码间干扰,对长尾 ISI 抑制效果更好,但实现复杂度较高。
在实际系统中,通常采用多级均衡结构:发送端预加重进行初步补偿,接收端通过 CTLE 与 DFE 进一步恢复信号质量,从而适应长距离链路传输。
此外,现代 SerDes 普遍支持自适应均衡机制,接收端可根据链路状态动态调整参数,以适应不同线缆长度和环境条件。这一特性在车载应用中尤为重要,因为系统布线和环境差异较大。
随着数据速率不断提升,均衡技术在保障信号完整性和系统稳定性方面的重要性持续增强,是高速 SerDes 设计的核心技术之一。
6. 信道编码
在高速串行通信中,信道编码通过改善码流统计特性,满足时钟恢复(CDR)、直流平衡(DC Balance)以及跳变密度等要求,是保障稳定传输的重要技术。与均衡侧重物理信道补偿不同,信道编码主要通过数据处理优化传输特性。
车载 SerDes 中,信道编码通常需满足:保证足够跳变密度以支持 CDR、维持直流平衡避免基线漂移、降低连续相同电平影响,并提供一定的链路控制能力。实际系统中主要采用线路编码与扰码两类技术。
1)线路编码
线路编码通过映射输入数据以控制码流特性,常见方案包括:
8b/10b 编码:提供良好的 DC 平衡与跳变特性,并通过运行差分控制避免基线漂移,同时支持控制字符,但编码效率较低(80%)
9b/10b 编码:在保持类似特性的基础上提升编码效率至约 90%,适用于高带宽场景
64b/66b 编码:通过少量冗余实现约 97%编码效率,适合高速链路,但需结合扰码以改善统计特性
2)扰码(Scrambling)
扰码通过伪随机序列对数据进行变换,使码流接近随机分布,从而避免长时间连续电平并提高跳变密度。该技术通常基于 LFSR 实现,结构简单、开销较低,在接收端通过解扰恢复原始数据。扰码还可改善频谱分布,降低电磁干扰。
在采用 AC 耦合的链路中,DC Balance 是重要设计因素。8b/10b 和 9b/10b可实现严格平衡,而高效编码方案通常结合扰码以在统计意义上维持电平平衡,并优化频谱特性。
总体来看,线路编码与扰码协同作用,使车载 SerDes 在高速传输条件下仍能保持良好的信号统计特性和稳定的时钟恢复能力。随着带宽需求提升,未来编码技术将在效率与信号特性之间进一步优化,以支撑更高速的数据互连。
7. 断点检测
7.1 技术背景
在智能汽车电子系统中,SerDes 是连接传感器与域控制器的关键链路,主要采用同轴线与屏蔽双绞线两种方案,二者在阻抗及 TDR 检测机制上差异显著。为应对复杂车载环境引发的线缆故障,时域反射技术凭借其非破坏、高精度、可在线检测等优势,成为 SerDes 芯片中实现快速定位与识别故障的主流方案。
7.2 同轴线传输方案的 TDR 检测
同轴线传输方案采用单端信号传输方式,其典型架构如图 2-2 所示:
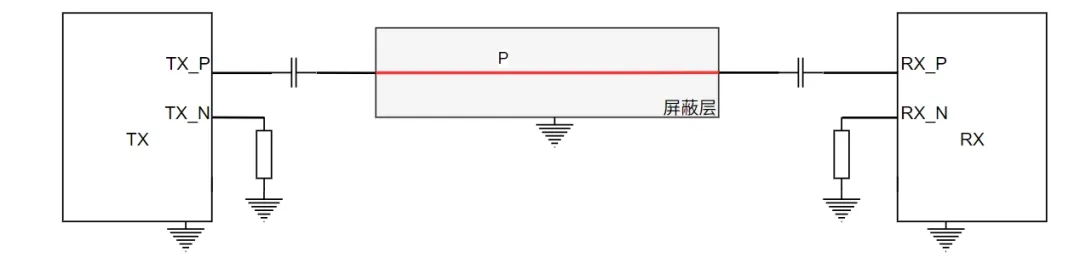
图 2-2 同轴线典型架构图
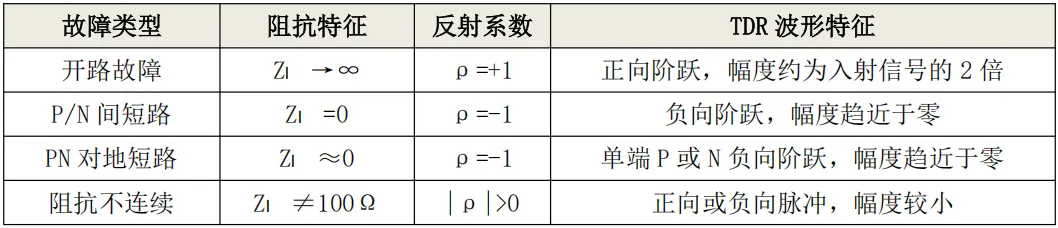
同轴线传输方案采用单端信号传输,P 信号经中心导体传输,N 信号通过 50Ω电阻接地,外屏蔽层作回流路径。其特性阻抗为 50Ω,收发端匹配 50Ω电阻。TDR 检测以单端模式测量中心导体与屏蔽层间的阻抗特性,激励信号由芯片内置发射器注入 P 端,屏蔽层为参考地。同轴线故障检测机制如表 2-2 所示:
表 2-2 同轴线故障检测机制

故障定位公式:

其中,v 为信号在同轴线中的传播速度(典型值约为 0.6c∽0.7c,c 为光速),Δt 为激励信号与反射信号的时间差。
图 2-3 展示了同轴线传输方案中各种故障类型的 TDR 激励信号和接收波形:
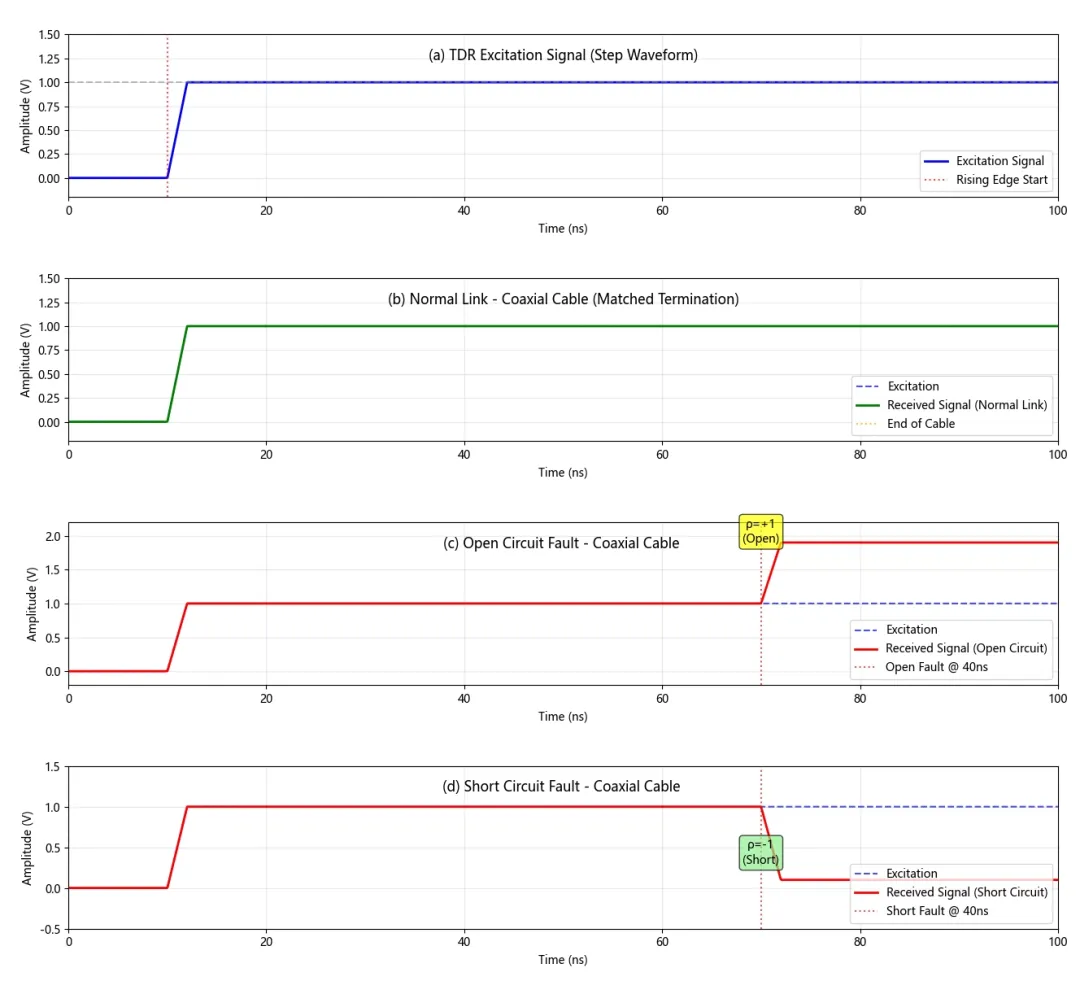
图 2-3 同轴线典型故障波形
同轴线传输方案采用单端信号传输,特性阻抗为 50Ω。TDR 检测时,芯片向中心导体注入阶跃激励信号,通过测量中心导体与屏蔽层间的阻抗变化判断链路状态。其典型故障反射特征如下:开路呈正向阶跃(ρ≈+1),短路呈负向阶跃(ρ≈-1),阻抗不连续则出现对应幅度的小反射脉冲。
7.3 屏蔽双绞线传输方案的 TDR 检测
屏蔽双绞线传输方案采用差分信号传输方式,其典型架构如图 2-4 所示:
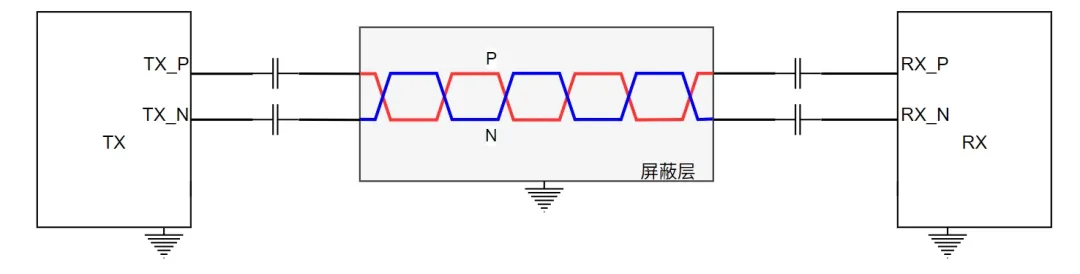
图 2-4 屏蔽双绞线 STP
屏蔽双绞线(STP)传输方案采用差分信号传输,P、N 两路反相信号构成差分对。其特性阻抗为 100Ω,收发两端需配置 100Ω端接电阻。TDR 检测采用差分模式,由芯片内置驱动器向 P、N 两端同时注入差分阶跃激励信号,通过测量P、N 两端间的差分阻抗变化,实现对链路状态与故障位置的判别,屏蔽双绞线故障检测机制如表 2-3 所示。
表 2-3 屏蔽双绞线故障检测机制
故障定位公式:

其中,v 为信号在 STP 中的传播速度(典型值约为典型值约为 0.6c ~ 0.7c),Δt 为激励信号与反射信号的时间差。
7.4 芯片级 TDR 故障检测实现方案
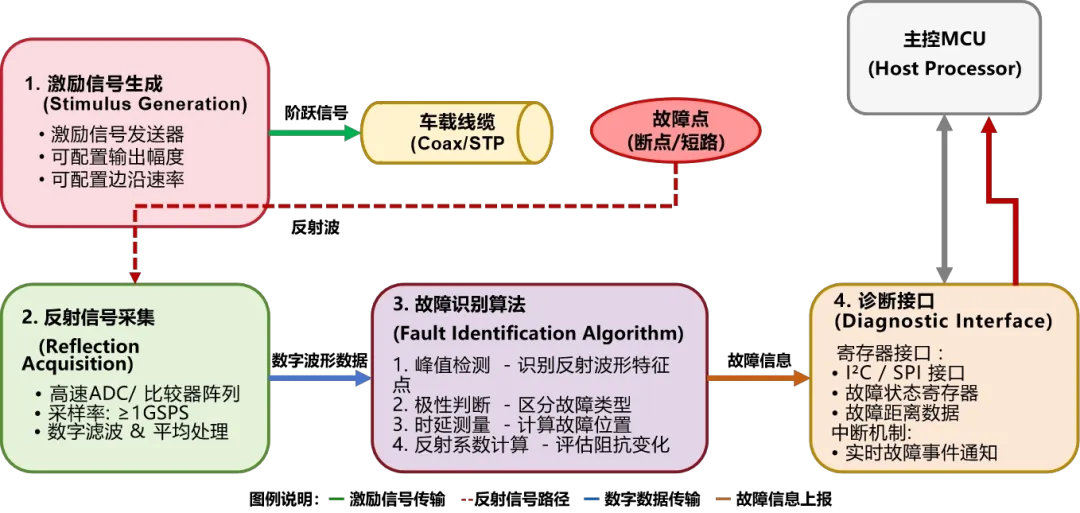
图 2-5 车载 SerDes 芯片 TDR 概念结构框图
如图 2-5 所示现代车载 SerDes 芯片内部集成 TDR 功能,通过以下模块实现线缆断点检测:
1)激励信号生成:由反向链路发送器产生可配置阶跃信号;
2)反射信号采集:高速 ADC 采样反射波形,数字滤波提升信噪比;
3)故障识别算法:通过极性判断故障类型(开路/短路),依据时延计算位置;
4)诊断接口:支持 I²C/SPI 读取故障信息,并可通过中断实时上报。
7.5 典型性能指标
典型性能指标如表 2-4 所示:
表 2-4 典型性能指标

目 录: