手机版
二维码
购物车
(
0
)
供应
求购
公司
团购
展会
资讯
招商
品牌
人才
知道
专题
图库
视频
下载
商圈
推广
热搜:
采购方式
滤芯
带式称重给煤机
甲带
气动隔膜泵
减速机型号
无级变速机
链式给煤机
履带
减速机
首页
供应
求购
公司
团购
展会
资讯
招商
品牌
人才
知道
专题
图库
视频
下载
商圈
首页
>
资讯
>
展会资讯
灵巧手行业深度分析
日期:2026-05-06 22:55:16 来源:网络整理 作者:本站编辑
评论:0
灵巧手行业深度分析
关注公众号,点击公众号主页右上角“ ··· ”,设置星标,实时关注智车行业最新资讯
来
源
:EVH1000机器人
1.1 灵巧手:集驱动、传动、感知于一体的高精度末端执行器
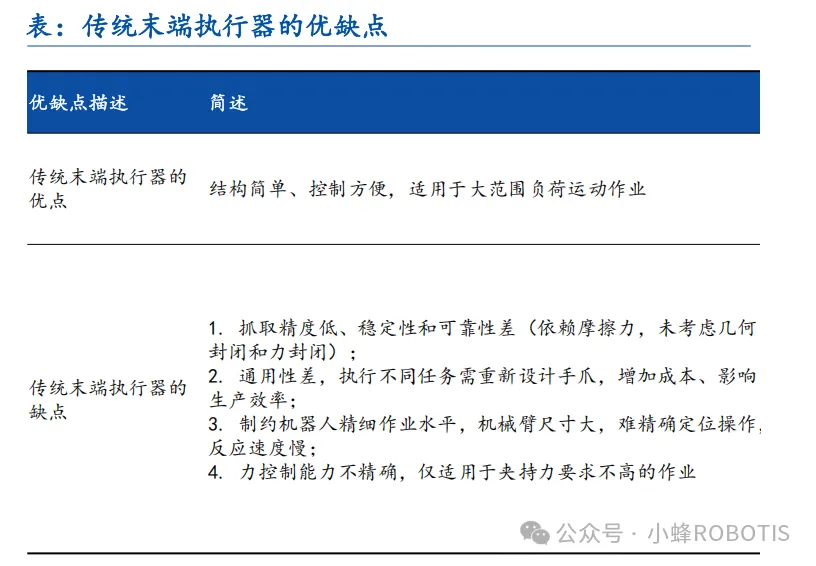
灵巧手是集多方面功能于一体的高精度末端执行器,能够在极限或者有害环境下替代人类进行复杂的操作任务,主要由驱动、传动、感知三大模块组成。
人的双手经过长期劳动进化完美,可应用于不同场合完成不同工作任务,具备充分的泛化性。传统末端执行器具备结构简单、便于控制、适用于大范围负荷运动作业等优点,但是也存在通用性差、精度不足、可靠性欠缺等一系列缺点。灵巧手是集成驱动、传动、感知等多方面功能于一体的高精度末端执行器,能够在极限或者有害环境下替代人类进行复杂的操作任务,主要由驱动、传动、感知三大模块组成。从运动学的观点看,人形机器人灵巧手需满足两个条件:指关节运动时能使物体产生任意运动、指关节固定时能完全限制物体的运动,这意味着人形机器人灵巧手至少要3个手指和9个自由度。
1.2 发展历程:产品演进五十余年,向更高仿生度、感知能力和轻量化方向迭代
灵巧手是机器人操作和动作执行的末端工具,行业演进五十余年,2010年后相关研究加速,目前正向更高仿生度、更强感知能力和轻量化方向发展。1974年, 日本电工实验室研发的Okada灵巧手n1是严格意义上的第一款灵巧手,由3个手指组成,共11个自由度;20世纪80年代,灵巧手研究大幅增加,以斯坦福大学研发的Stanford Hand为代表,其具有3个手指9个自由度,单只手指采用4个电机驱动,并利用N+1腱传动结构控制N个自由度,同时能够保证腱具有正张力。2016年,华盛顿大学基于仿生设计原理研制出一款灵巧手,质量小于1kg,利用人造关节囊、韧带、肌腱和弹性滑轮结构设计,使得人手的韧带和关节特征得以复现,抓取也更加灵活可靠。2021年,韩国的科研团队研发了一种集成连杆驱动的灵巧手ILDA,共有15个自由度(20个关节)、34N的指尖力,结构紧凑,无须外置驱动部件,质量仅为1.1kg,在手指关节处安装有触觉传感器,具备感知能力,可以轻松抓取鸡蛋,并可完成剪纸、夹装芯片和挤压瓶罐等操作。整体来看,灵巧手产品在向更高仿生度、更强感知能力、轻量化的方向迭代。
1.2 发展历程:产品演进五十余年,向更高仿生度、感知能力和轻量化方向迭代
灵巧手是机器人操作和动作执行的末端工具,行业演进五十余年,2010年后相关研究加速,目前正向更高仿生度、更强感知能力和轻量化方向发展。
1974年, 日本电工实验室研发的Okada灵巧手n1是严格意义上的第一款灵巧手,由3个手指组成,共11个自由度;20世纪80年代,灵巧手研究大幅增加,以斯坦福大学研发的Stanford Hand为代表,其具有3个手指9个自由度,单只手指采用4个电机驱动,并利用N+1腱传动结构控制N个自由度,同时能够保证腱具有正张力。2016年,华盛顿大学基于仿生设计原理研制出一款灵巧手,质量小于1kg,利用人造关节囊、韧带、肌腱和弹性滑轮结构设计,使得人手的韧带和关节特征得以复现,抓取也更加灵活可靠。2021年,韩国的科研团队研发了一种集成连杆驱动的灵巧手ILDA,共有15个自由度(20个关节)、34N的指尖力,结构紧凑,无须外置驱动部件,质量仅为1.1kg,在手指关节处安装有触觉传感器,具备感知能力,可以轻松抓取鸡蛋,并可完成剪纸、夹装芯片和挤压瓶罐等操作。整体来看,灵巧手产品在向更高仿生度、更强感知能力、轻量化的方向迭代。
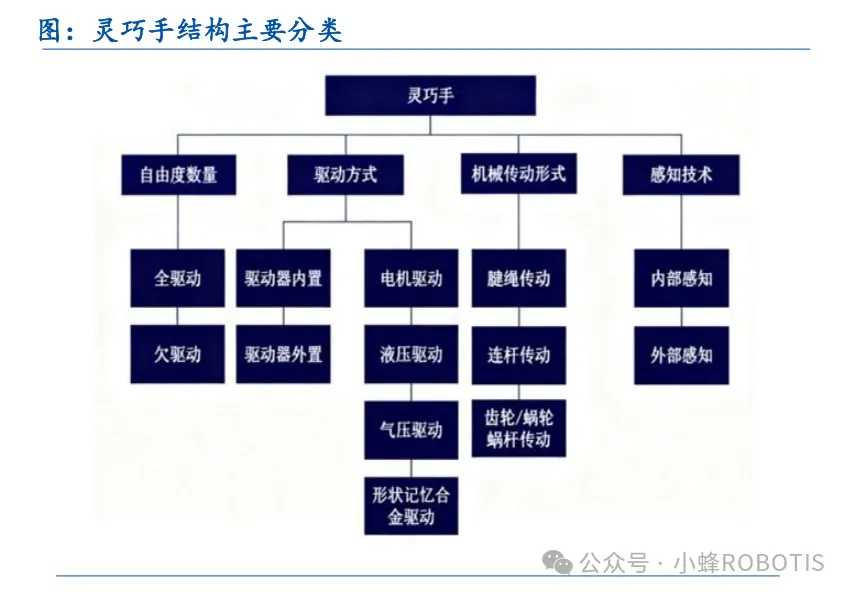
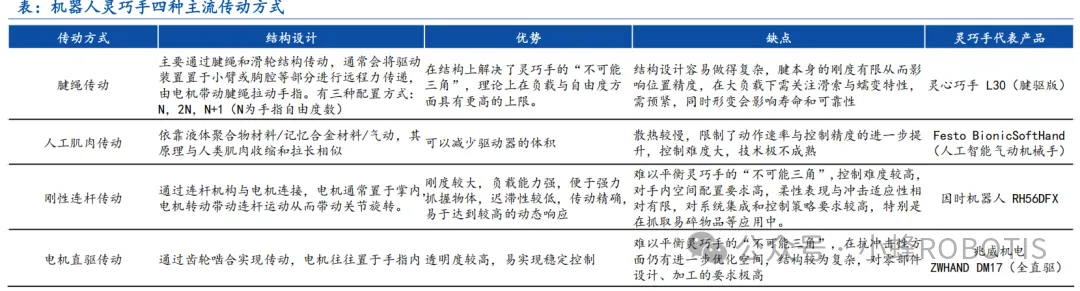
1.3 设计结构:电驱为主流,传动方案及自由度尚未收敛
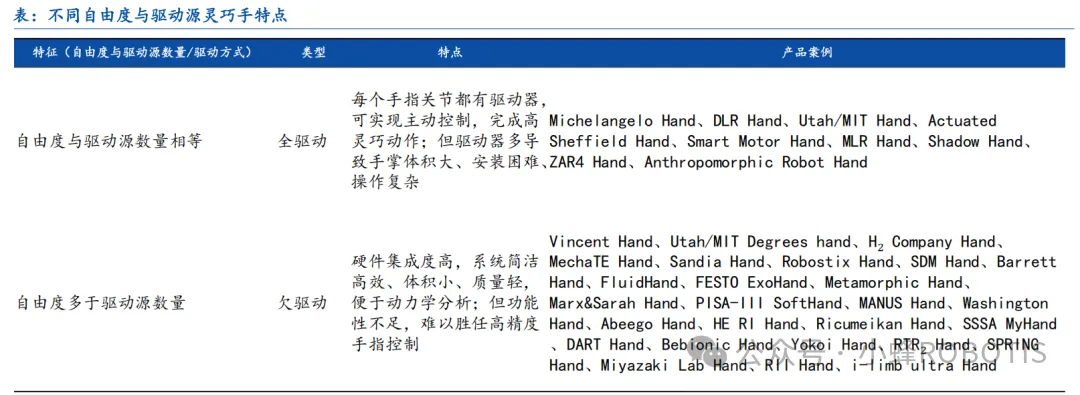
根据自由度与驱动源数量,可将灵巧手分为全驱动和欠驱动两大类,其中全驱动灵巧手灵巧程度更高但对手掌体积、安装提出更高要求,欠驱动灵巧手硬件集成度以及轻量化程度高,但存在功能性不足以及精巧控制能力存在提升空间等特点。
全驱动灵巧手驱动源的数量与被控制灵巧手的自由度数量相等。每个手指关节都有驱动器,使其能够实现主动控制,在某种程度上能够像人手一样完成全部的动作指令甚至要求更高的灵巧动作。但是,全驱动也意味着需要更多的驱动器,会使手掌体积变大、安装困难、操作复杂。欠驱动灵巧手被控制的自由度多于驱动源的数目,缺少驱动源的部分则进行耦合随动。欠驱动手硬件集成度高,整体系统简洁高效、体积小、质量轻,便于进行动力学分析。但是,欠驱动机械手的高集成性一定程度上也是牺牲高自由度性能的结果,存在功能性不足的问题,尤其是对于精度要求比较高的手指精巧控制无法胜任。
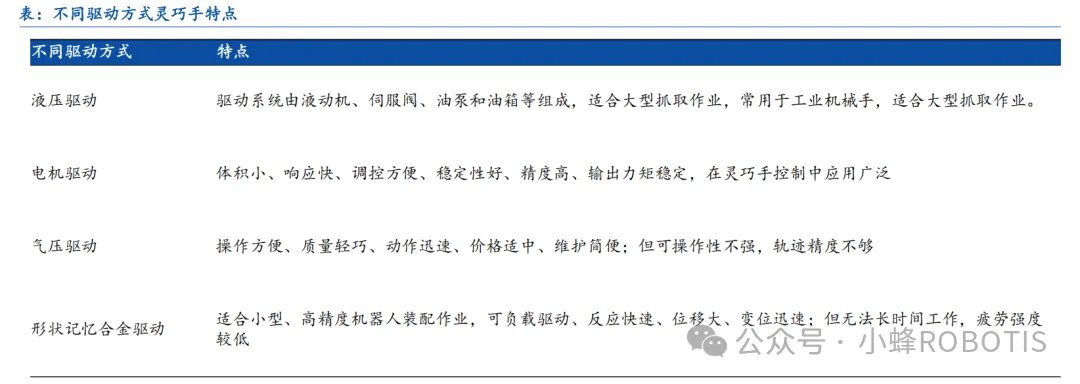
电机驱动具备体积小、响应快,调控方便、稳定性好、精度高、输出力矩稳定等优点,成为灵巧手的主流驱动方式。
灵巧手主要的驱动方式包括4种:液压驱动、电机驱动、气压驱动、形状记忆合金驱动。其中液压驱动、气压驱动、形状记忆合金驱动适用场景存在精度不足、疲劳强度低等缺点,与灵巧手的高精度、使用寿命高要求需求难以匹配,电机驱动具备体积小、响应快,调控方便、稳定性好、精度高、输出力矩稳定等优点,更加适合灵巧手的使用。目前人形机器人主流灵巧手均为电机驱动。
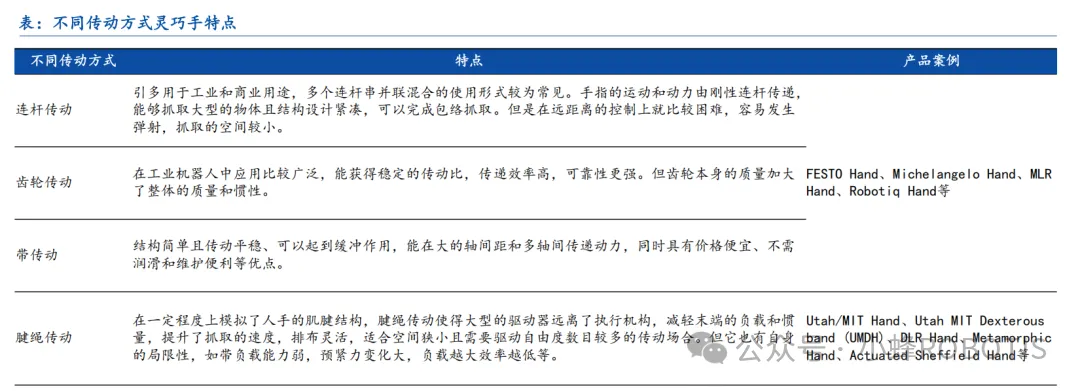
机械传动机构的选择对于灵巧手的性能至关重要。一方面决定了机械设计的复杂程度以及成本,另一方面则直接影响灵巧手传动的效率和可靠性。灵巧手的主要传动方式有连杆传动、齿轮传动、带传动以及腱绳传动,其中连杆传动以及腱绳传动为主流趋势。
连杆传动能够抓取大型的物体且结构设计紧凑,可以完成包络抓取,但是在远距离的控制上就比较困难,容易发生弹射,抓取的空间较小。腱绳传动在一定程度上模拟了人手的肌腱结构,腱绳传动使得大型的驱动器远离了执行机构,减轻末端的负载和惯量,提升了抓取的速度,排布灵活,适合空间狭小且需要驱动自由度数目较多的传动场合。
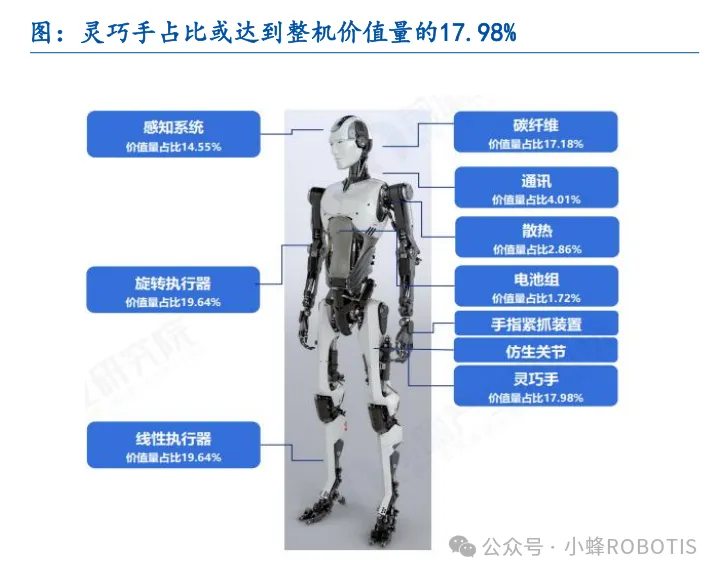
1.4 市场空间:整机价值量占比或达17.98%,预计销量快速增长
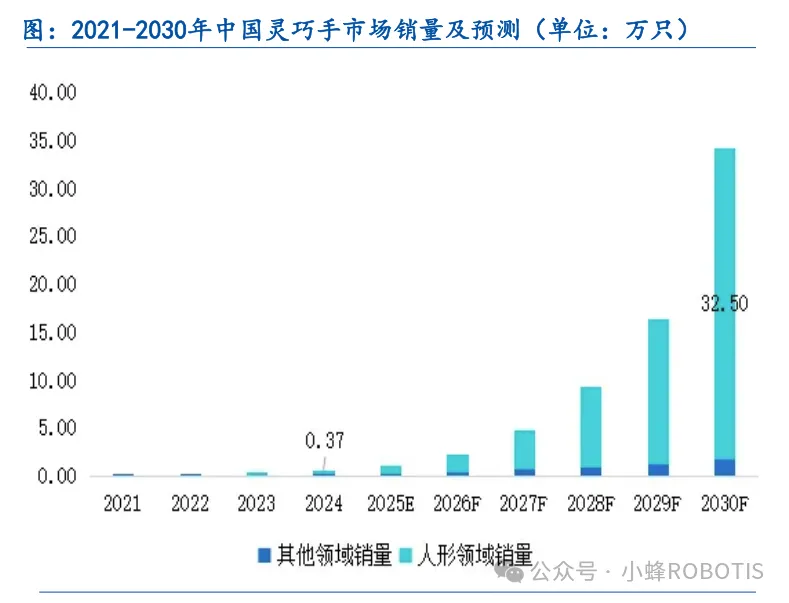
灵巧手占据整机价值量或达17.98%,销量或以90% CAGR快速增长。
目前业界将灵巧手视为解决人形机器人规模化落地应用“最后一厘米”的关键末端执行器,占据整机价值量或达17.98%。根据高工机器人产业研究所(GGII)数据,2024年中国机器人灵巧手市场销量约0.57万只,预计到2030年,中国机器人灵巧手市场销量将有望突破34万只,2024-2030年CAGR约为90%。当前灵巧手行业仍处于起步阶段,随着材料、电机、传动、运控、传感等技术的持续进步与提升,灵巧手实质性产业化的拐点有望加快到来。
2、发展趋势:腱绳传动刚柔并济,电子皮肤赋能感知
2.1 腱绳传动打破机器人灵巧手多重性能权衡的困境
腱绳具备轻量化、柔性化等优势。
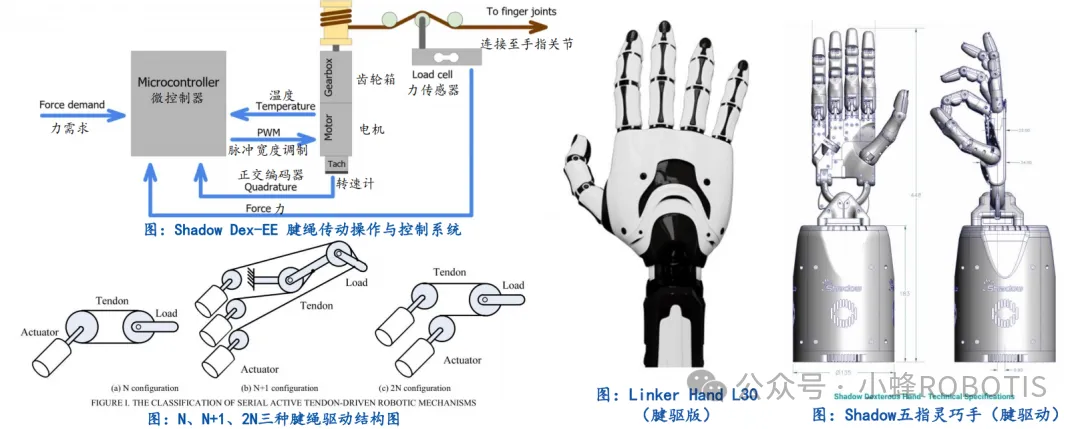
当前国内主流采用的连杆传动方案虽具备双向控制、耐用性强、制造维护便捷等优势,但其结构笨重、柔性不足、抗冲击性弱等固有缺陷正成为技术升级的瓶颈。常见传动方案中,腱绳传动是一种通过柔性肌腱实现动力传递的机器人灵巧手关节驱动方案。由于灵巧手对紧凑性的严苛要求,电机、减速器等大体积驱动组件难以集成到有限的手部空间内。腱绳传动可将驱动单元外置于前臂或机身,通过腱绳和滑轮结构将动力传递至手指关节。虽然腱绳传动具备轻量柔性等优势,但在实际应用中仍存在一定挑战:布线复杂、需配备张力感知机构,以及滑轮系统中的摩擦问题等,对性能表现带来一定影响。在高自由度设计中,系统体积和集成难度较大,例如Utah/MIT手需大量滑轮与独立驱动空间;而Pisa/IIT SoftHand虽简化驱动,却在精度上有所妥协。
腱绳主流应用材料为超高分子量聚乙烯纤维(UHMWPE)。
目前主流材料为超高分子量聚乙烯纤维(UHMWPE),具备超高强度(13倍于钢)、极低密度、优异耐磨性与化学稳定性。不过,长期处于辐射与机械载荷作用下会导致结晶度上升,从而影响韧性与摩擦学性能,限制其使用寿命与可靠性。因此,科研机构和企业正通过表面改性与复合工艺手段进行优化,推动其在高精度、高耐久场景下的可靠应用。此外,腱绳传动可根据每个关节驱动器数量分为N型、N+1型和2N型三种配置,适配不同自由度与控制策略。相较其他方案,其轻量化优势显著,同时支持欠驱动设计,能提升抓握灵活性与适应性。正因如此,腱绳传动被认为是当前最有可能突破灵巧手“不可能三角 ”(成本—系统参数—稳定性)限制的技术路径。 目前该技术已广泛应用于机器人灵巧手及仿人机器人等领域,不同配置方案为开发者在自由度、紧凑性和控制精度等关键指标之间提供了多样化的选择空间。
典型应用案例包括采用2N型滑轮传动系统的Utah/MIT灵巧手和Awiwi灵巧手,具备高强度、低摩擦的传动特性,而Shadow马达灵巧手采用N型配置则实现了更紧凑的结构设计(Shadow Dex-EE三指灵巧手采用N+1型配置)。目前国内采用腱绳传动的灵巧手以灵心巧手的L30腱驱版为代表。
这一趋势在特斯拉Optimus灵巧手的迭代中得到了充分验证:从早期“蜗轮蜗杆+腱绳 ”混合传动(存在结构笨重、动态响应不足等问题),到第三代采用“行星齿轮箱+行星滚柱丝杠+腱绳 ”复合传动方案的协同设计,成功解决了传统方案在重量与灵活性之间的矛盾,使灵巧手在提升单手承载力的同时,仍能保持接近人类手指的灵活运动能力。这一演进过程充分展现了腱绳传动在实现远距离柔性动力传输方面的不可替代性,是构建高性能灵巧手的理想选择。
UHMWPE腱绳潜在市场规模:百万人形机器人或对应9.6-72亿元市场空间。 目前机器人腱绳材料主要采用钢丝绳或超高分子量聚乙烯纤维(UHMWPE)。
其中,UHMWPE具有超高强度(13倍于钢)、极低密度、化学稳定性和卓越耐磨性,可显著提升机器人的动态响应与耐久性,是机器人腱绳的最优材料。 目前,灵巧手厂商在材料选择上正呈现明显趋势,超高分子量聚乙烯纤维(UHMWPE)腱绳因其优异性能,逐渐成为高精度机器人的关键组件。
假设国内市场上用于机器人灵巧手的单根腱绳价格为40~60元,不同自由度N+1型腱绳传动结构灵巧手(双手)对应单台机器人腱绳价值量为960~3720元;若出货量达100万台则对应腱绳市场规模可达9.6~37.2亿元。
同理,假设国内市场上用于机器人灵巧手的单根腱绳价格为40~60元,不同自由度2N型腱绳传动结构灵巧手(双手)对应单台机器人腱绳价值量为1760~7200元;假设出货量为100万台则对应腱绳市场规模可达17.6~72亿元。
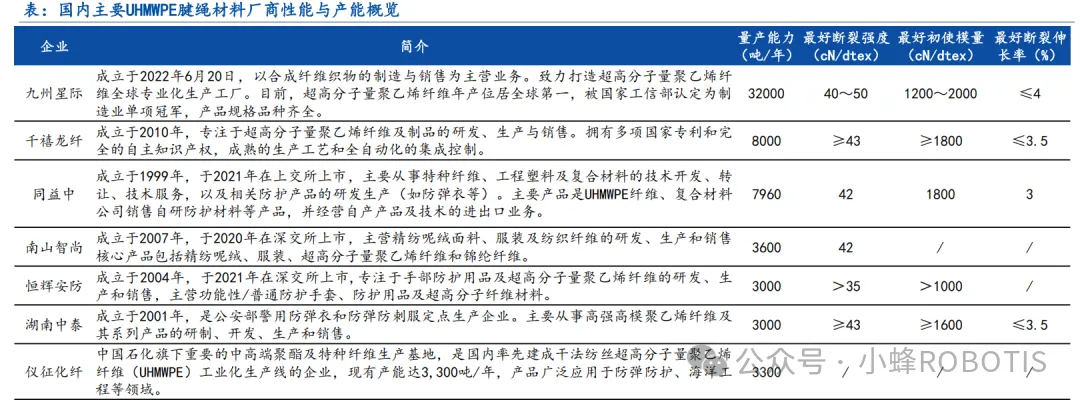
中国作为全球腱绳生产大国,截至2024年产业规模占据全球六成以上,具备较强的制造与供给能力。
随着人形机器人进入规模化发展阶段,对腱绳在强度、耐磨性、疲劳寿命和控制稳定性等方面的要求不断提升,特别是灵巧手等高精度部件对材料模量与断裂伸长率等性能指标提出更严苛标准。 国产UHMWPE腱绳在断裂强度与初始模量方面部分已具备国际先进水平(海外UHMWPE领域龙头企业Dyneema最新推出的“SK99纤维 ”断裂强度为42.5cN/dtex,初始模量为1590cN/dtex),并正加速向高模量、低延展方向发展。未来国产产品将在保障供给安全的同时,实现从“产量领先 ”向“性能提升 ”的转型,进一步夯实在全球产业链中的竞争优势。
超高分子量聚乙烯纤维具备超高强度、超高模量、耐磨损、低密度、耐疲劳等性能,能够满足人形灵巧手传动的要求,南山智尚、恒辉安防、同益中等公司具备UHMWPE对应产能,可应用于人形机器人灵巧手腱绳,部分企业已经开始送样,有望伴随人形机器人浪潮核心受益。
2.2 传感器赋予多维感知能力,触觉、力觉传感器为高价值量方向
目前传感器方面的整体趋势是向多维度、高精度、高集成度、高延展性方向发展,高维力矩传感器和触觉传感器是传感器方面的当前研究重点。
传感器是灵巧手的“皮肤 ”和“神经系统 ”,它不仅赋予机器人感知外部环境的能力,还为其精细操作提供了关键信息支撑。灵巧手的传感器主要分为位置传感器、视觉传感器、力/力矩传感器、触觉传感器。
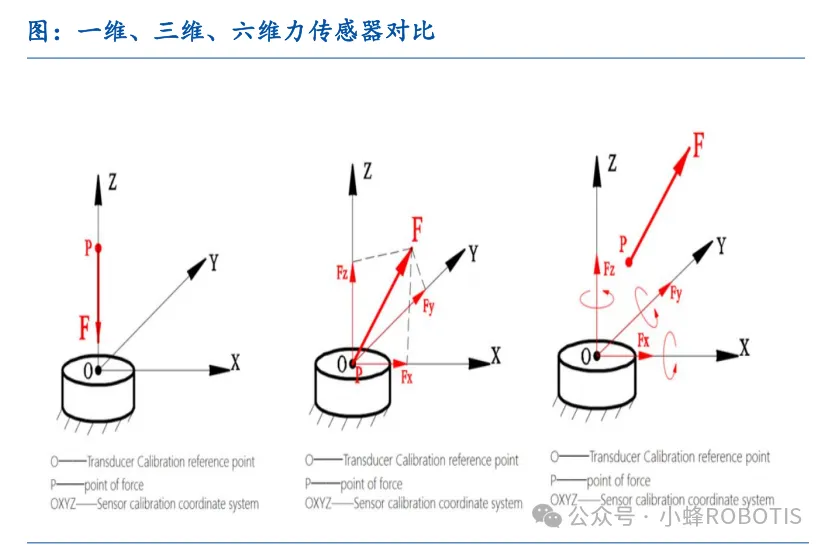
力/力矩传感器是一种能感知力、力矩并转换成可用输出信号的传感器,核心原理是将力作用下的形变转换成电信号,当有力/力矩作用时,力/力矩施加于传感器本体单元上,并引起本体单元的应变或形变,检测系统感知本体的应变或形变,通过电路将其转化为相应电压,通过测量电压值来表征力/力矩大小,并转换成可用输出信号,实现力/力矩的测量。人形机器人关节处使用单维力传感器,执行器末端主要使用六维力传感器, 目前国内厂商主要处于提高测量精度及降本阶段。
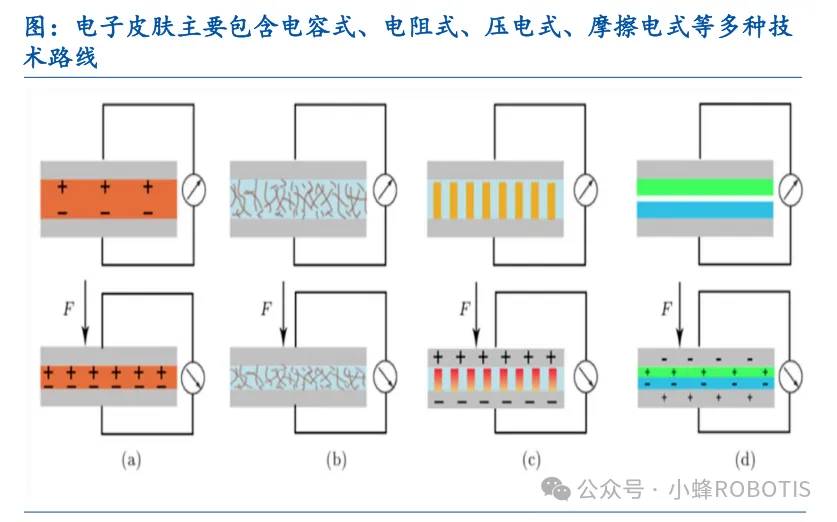
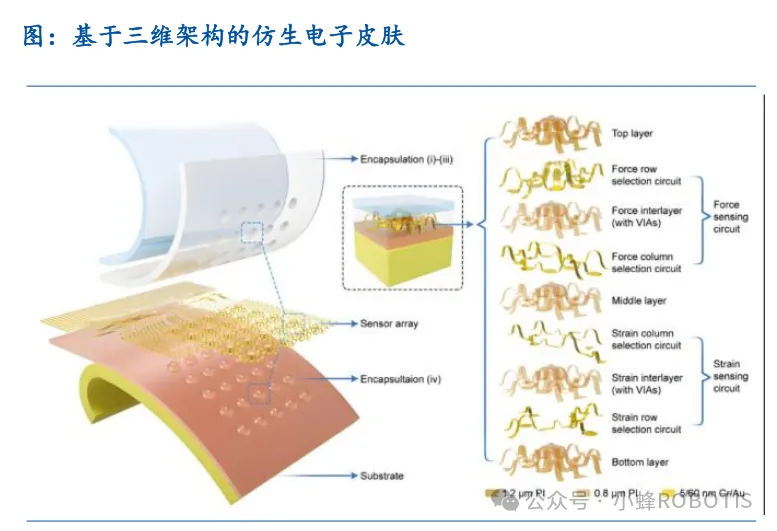
触觉传感器的核心是 “感知交互 ”,主要任务是为获取对象与环境信息和为完成某种作业任务而对机器人与对象、环境相互作用时的一系列物理特征量进行检测或感知。本质上是将接触面形状、压力、摩擦力、温度等信息进行感知识别和转换的传感器,其组成部分包括电极、敏感材料和导电材料等。当下触觉传感器两种主要的技术路线:MEMS、柔性触觉传感器(电子皮肤)。
电子皮肤具备产业化价值,国内企业有望在全球竞争中占据重要地位。
柔性触觉传感器又称为“ 电子皮肤 ”,能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测,是利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。 其具备类似于人类皮肤的柔韧性,可以适应任意载体形状,更利于测量物体表面受力信息、感知目标物体性质特征,具有研发和产业化价值, 目前正处于研发和小批量应用阶段。
技术层面来看,按照转换信号原理的不同,柔性触觉传感器可以分为压阻式(电阻式)、电容式、电感式、压电式、光电式等,其中电容式、压阻式柔性传感器应用较多。柔性压阻式传感器以器件结构简单、灵敏度高、响应快、制造成本低、稳定性好等优点被认为是下一代柔性压力传感器的理想选择。劣势是体积大,不易实现微型化;功耗高,接触表面易碎;易受噪声影响。电子皮肤作为仿生智能界面,其研发面临材料、制造和算法三端协同挑战。产业链涵盖材料研发、传感器制造、系统集成、终端应用等多个环节,全球范围内已形成以欧美为主导、亚太快速追赶的竞争格局。 目前国内福莱新材、 日盈电子、汉威科技等企业凭借技术储备与市场潜力,有望在全球竞争中占据重要地位。
3、竞争格局:三类玩家共塑产业生态,产品迭代进化不止
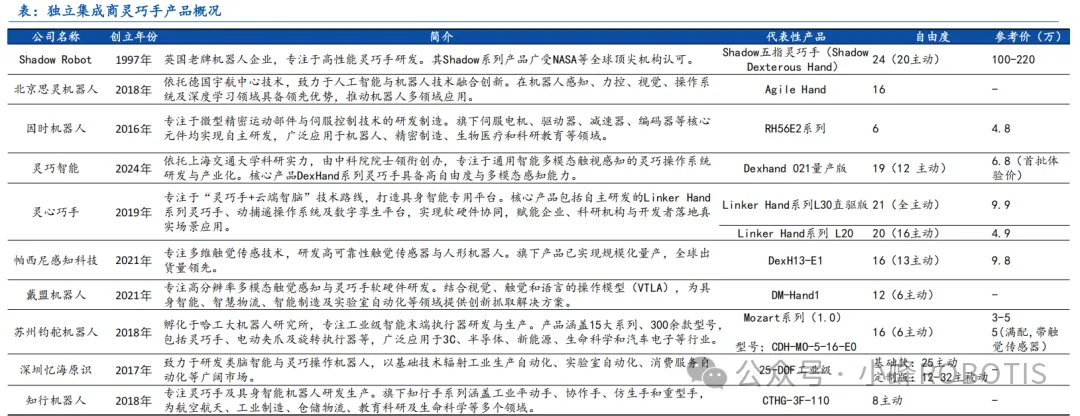
3.1 独立集成商:国内厂商于自由度、核心部件设计、感知等层面具备亮点
灵巧手独立集成商相较其他厂商整体更早推出成熟产品并且对外发售,其中,国外厂商发展较早,但产品售价较高, 国内厂商产品在自由度、核心部件设计、感知等层面各有特点,单价普遍介于5-10万元之间。
国外以Shadow Robot为代表,其系列产品广受NASA等全球顶尖机构认可,但售价较为昂贵。国内则以灵心巧手、 因时机器人、帕西尼感知为代表,其中灵心巧手2024年产品一经推出就占据了国内高自由度灵巧手超80%市场份额,产品最高可达42自由度; 因时机器人自主研发设计微型伺服电缸具备体积小、精度高、 负载大、成本低等优势,2024年完成近2000台仿人五指灵巧手的交付。帕西尼感知于灵巧手电子皮肤领域发力,2024年WRC推出的DexH13 GEN2搭载了上千颗专业级ITPU多维触觉传感器以及800万高清AI手眼相机,在灵巧手多维触感方面处于业界领先水平。
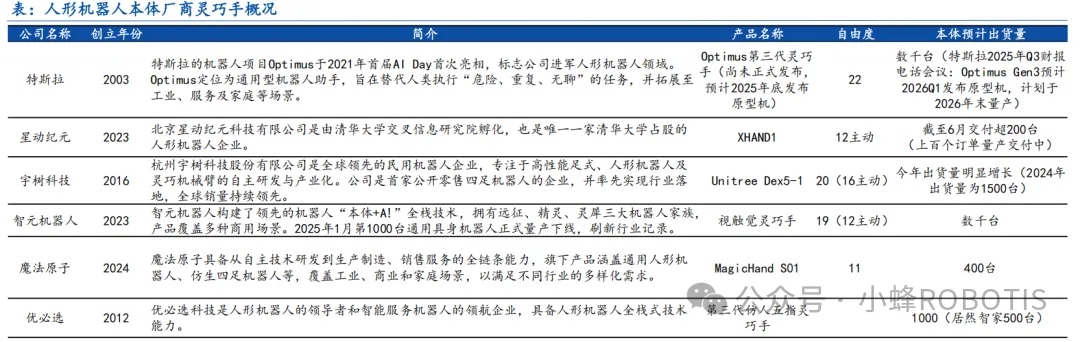
3.2 本体厂商:由整机向灵巧手纵深推进,任务能力与结构控制协同演进
目前人形机器人本体厂商于近年推出自身本体产品后将研发重心拓展至灵巧手方向,且持续进行多自由度控制、结构设计、任务适用性等维度的迭代。
海外代表企业为特斯拉推出的Optimus ,灵巧手已迭代至第三代,手部自由度由原来的11个增加至22个,采用腱绳驱动的三级传动结构将执行模组与手指末端连接,有效兼顾了重量与灵活性。国内代表性厂商为智元、宇树、星动纪元、魔法原子,其中智元机器人2024年8月推出的19自由度视触觉灵巧手集成了高精度的MEMS触觉感知和视触觉感知技术,提升抓取、操作等任务中的精度和效率的同时为其在复杂环境中的自主决策和适应性提供了有力支持,此外,其灵巧手抓握力有明显提升(整手抓握5kg, 自锁提拉30kg),能够轻松应对工业级的高负载工况。宇树科技推出的Dex5-1灵巧手通过全关节反驱+丰富触觉传感器设计,指尖重复定位精度达±1mm ,适合复杂曲面抓握任务。魔法原子主打高控制精度与高负载能力,通过自研关节模组和力位混合控制算法,MagicHand S01力分辨率最高可达0. 1N可实现双指精细操作,满足如拧螺丝等工业高精度作业需求。星动纪元推出的XHAND1具备高可靠性(空载寿命可达百万次)的同时每指指尖120-300点的三维触觉信息采集能力。
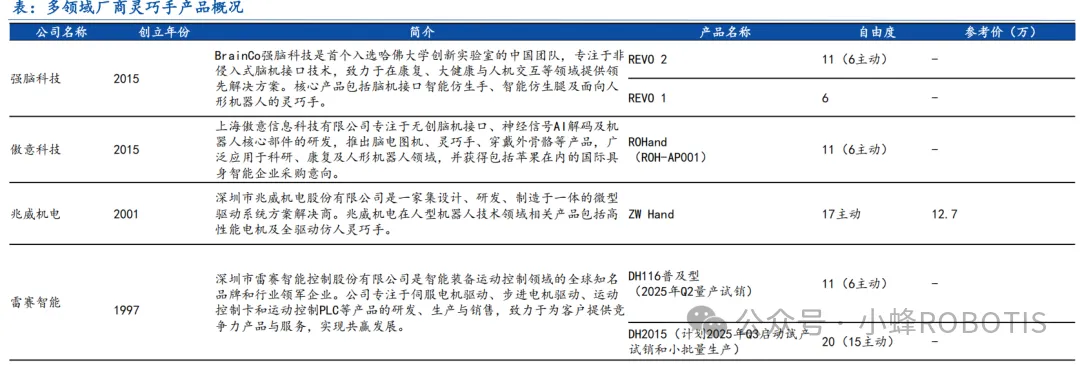
3.3 多领域厂商:脑机控制与灵巧操作协同演进,赋能康复、工业与交互新场景
随着脑机接口与灵巧操作技术的融合发展,国内企业如BrainCo、傲意科技等,探索多种技术路径向康复、工业和具身交互等场景应用布局,兆威机电、雷赛智能凭借强大工业储备切入灵巧手赛道。
BrainCo强脑科技依托非侵入式脑机接口技术,现已开发出具备高精度与实时控制能力的智能仿生手,支持截肢用户的直觉控制。其2025年5月推出的仿生灵巧手 Revo 2仅重383g,整手握力大于等于50N的同时可单手承载20kg,公司具备一定的跨领域适配能力。此前公司已于2020年向市场推出全球首款实现量产的脑控智能义肢。傲意科技以轻量化设计与高负载性能为特色, ROH-LiteS小手重量仅约457克,单指负载最高可达8kg。且依托医疗级仿生手的成熟供应链体系,公司成功将工业灵巧手的单台BOM降至万元以内。兆威机电与雷赛智能在微型驱动系统与运动控制方面具备深厚积累,兆威机电主打紧凑设计与高耐久性,雷赛智能主打高负载,其DH116灵巧手最大负载可达全球领先的40kg, 自重仅490g,抓握寿命超100万次,在需要高批量、低成本的工业和商业自动化环境中具有显著优势。
3.4 部分企业详细介绍
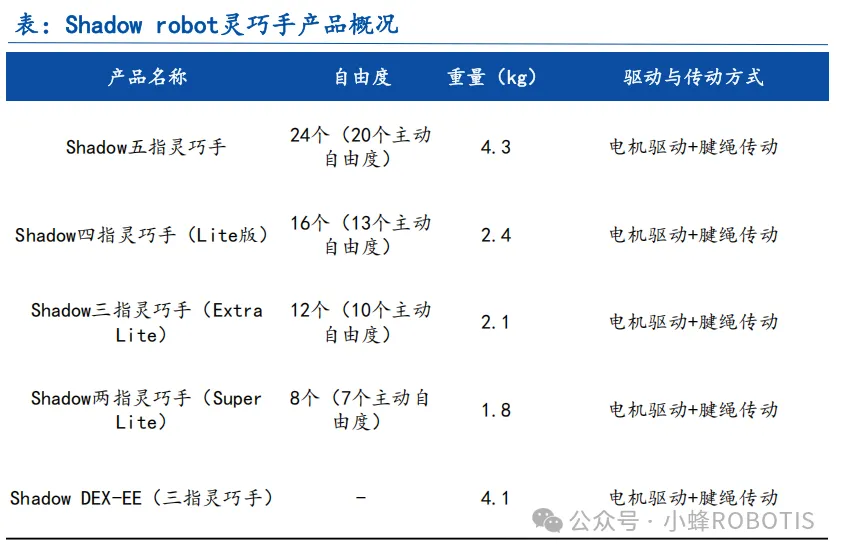
3.4.1 Shadow Robot:“即插即用”无缝切换模拟和真实硬件
Shadow Robot Company 公司成立于1997年,是英国老牌机器人企业,专注于机器人灵巧手和远程控制系统的开发。公司长期致力于开发仿人机器人部件,灵巧手产品拥有媲美人手的运动学设计。
灵巧手产品广受NASA、GSK、西门子、MIT、高通等全球顶尖机构认可,是全球最早将高自由度灵巧手商品化的企业之一。Shadow系列灵巧手完全集成ROS、可通过EtherCAT接口以100Hz至1kHz的频率提供实时反馈、可轻松集成在机械臂、且支持其他组件升级;与Google Deepmind合作后最新推出的Shadow Dex-EE声称是“市场上最坚固耐用的机械灵巧手之一 ”。公司所有产品均为客户提供集成了用于抓取和操作开发的完整物理模型代码库,且所有微控制器的源代码和电子子系统的原理图均可在保密协议下获取。软件接口完全一致,无需修改代码,只需更换对应的启动文件即可在开发流程中无缝切换模拟和真实硬件,方便调试和部署。
3.4.2 灵心巧手:单手可达最高42个自由度,2024年占据超80%国内高自由度灵巧手市场份额
灵心巧手成立于2019年,聚焦“灵巧手+云端智能 ”的技术路线,构建面向具身智能的专用平台。核心产品包括自研的Linker Hand系列灵巧手、动捕遥操作系统及数字孪生平台,具备软硬一体化能力,助力企业与科研团队在真实场景中高效部署智能系统。
自2019年成立以来,经历五年研发,2024年,产品一经推出就占据了国内高自由度灵巧手超80%市场份额,其产品最高可达42自由度,媒体称为目前全球商用灵巧手最高水平。公司旗舰款Linker Hand L30(直驱款)采用连杆传动方式与自研电机驱动,具备21个全主动自由度,产品采用端云融合技术,可直接通过云端技能库快速加载所需功能,用户无需编写代码,简化使用流程,实现高效的个性化操作。另有具备18主动自由度的腱绳驱动版,可提供更自然的手部运动。
3.4.3 因时机器人: 自研微型伺服电缸,2024年完成近2000台五指灵巧手交付; 2025H1灵巧手销量超4000台
创立于2016年,因时机器人专注于微型精密传动组件及伺服控制技术的研发与生产,是一家致力于“专精特新 ”的高新技术企业。其核心产品如伺服电机、驱动器、减速器和编码器等均由自主研发,广泛应用于机器人、精密制造、生物医疗及科研教育等多个领域。
公司自主研发设计的微型伺服电缸缸内部集成了高精密减速器、空心杯电机、丝杠机构、传感器和伺服控制系统,具备体积小、精度高、负载大、成本低等优势,现已应用于RH56系列灵巧手。对比市场上现有的五指灵巧手,因时机器人的灵巧手凭借产品重量轻以及高性价比等优势并于2024年完成近2000台仿人五指灵巧手的交付。2025年7月最新发布的RH56F1系列仿人五指灵巧手采用独创的隐秘式走线设计,提高线缆稳定性和可靠性的同时支持1KHz高速实时通讯。
3.4.4 帕西尼感知:独创ITPU多维度触觉传感技术,在多维触觉融合与精细操作性能方面达到业界先进水平
帕西尼感知科技(深圳)有限公司成立于2021年,专注于多维触觉感知技术,致力于自主研发高可靠性的触觉传感器与人形机器人。
公司公司产品线覆盖从“传感器核心零部件 ”到“人形机器人整机制造 ”的全链路环节,并已实现批量商业级交付,客户群体涵盖智能制造、康养医疗、工业生产、消费电子等重点领域。随着机器人触觉感知能力的提升,公司将引领下一代人形机器人行业的变革。 目前公司产品已实现批量化落地,广泛应用于工业、服务与科研等场景,在触觉智能领域发展迅速。公司于2024年WRC世界机器人大会上发布的DexH13 GEN2灵巧手,搭载了上千颗专业级ITPU多维触觉传感器及800万像素高清 AI手眼相机,在多维触觉融合与精细操作性能方面达到业界先进水平。
3.4.5 特斯拉:机器人灵巧手围绕感知和轻量化推进迭代,Optimus人形机器人目标在5年内生产100万台
特斯拉于2003年成立,其机器人项目Optimus于2021年首届AI Day首次亮相,标志公司进军人形机器人领域。Optimus定位为通用型机器人助手, 旨在替代人类执行“危险、重复、无聊”的任务,并拓展至工业、服务及家庭等场景。
特斯拉灵巧手从初代到三代, 自由度从11个增加到22个,电机等驱动装置移至前臂,传动方案从蜗轮蜗杆传动升级为腱绳与高精度丝杠传动。感知能力方面,新一代的传感器覆盖范围更大,集成了包括六维力矩传感器等更高精度的传感器。据特斯拉Optimus副总裁Milan Kovic透露, 目前人形机器人项目正围绕视觉感知、运动控制、动态响应和防摔倒机制四大方向进行迭代,力求让机器人行动更智能、步态更自然、反应更迅速,并具备自我保护与再站立能力。接下来,Optimus 团队将重点优化手部系统,包括扩大触觉感知范围、提升肌腱控制精度、减轻前臂重量,并在确保触觉灵敏度的前提下,为手掌和手指增加柔软且顺应性的保护层,以增强其安全性与适应性。根据特斯拉2025年Q3财报电话会议:Optimus Gen3预计2026年Q1推出原型机,计划于2026年底量产,最高年产能100万台。
3.4.6 星动纪元:模型+硬件全自研,截至2025年6月已交付超200台本体机器人
北京星动纪元科技有限公司成立于2023年8月,由清华大学交叉信息研究院孵化,也是唯一一家清华大学占股的人形机器人企业。截至2025年6月已交付超200台本体机器人(上百个订单量产交付中)。
公司从底层硬件(驱动电机与减速模块等,实现全自研一体化关节模组)到高层智能(端原生机器人大模型ERA-42)均实现自主研发,构建了“本体+模型 ”协同演进体系,形成软硬一体的结构性优势,具备快速迭代与多场景落地能力。
3.4.7 宇树科技: 加快推进机器人整机与核心部件的全产业链布局,2025年预计完成千台人形机器人交付
杭州宇树科技股份有限公司是全球领先的民用机器人企业,专注于高性能足式、人形机器人及灵巧机械臂的自主研发与产业化。公司是首家公开零售四足机器人的企业,并率先实现行业落地,全球销量持续领先
。Dex5-1灵巧手通过全关节反驱+丰富触觉传感器设计,指尖重复定位精度达±1mm ,适合复杂曲面抓握任务(手指均可独立更换,降低维修成本) 。单手94个触觉传感器,提升机器人精度以及感知功能。2024年完成超1500台人形机器人交付,据公司首席执行官王兴兴披露2025年机器人出货量持续增长。
3.4.8 魔法原子:多项核心零部件实现自主研发,2025年计划量产400台本体机器人
魔法原子(MagicLab)成立于2024年1月,是一家专注于具身智能通用机器人的高科技公司。公司具备从自主技术研发到生产制造、销售服务的全链条能力,致力于打造具备强大感知、认知与动作能力的通用机器人。
旗下产品包括通用人形机器人、仿生四足机器人等,覆盖工业、商业、家庭等多样化应用场景,以满足不同领域对通用智能体的需求。公司核心团队深耕机器人与人工智能多年,秉持长期主义理念,推动具身智能技术的产业化与普及化。公司推出的MagicHand S01灵巧手核心零部件如微型电动推杆、多圈绝对值编码器、六轴电机驱动器、高灵敏多点触觉传感器以及灵巧手控制器均由公司自主研发,并在设计中预留了性能余量,不仅显著提升了负载能力,也有效延长了零部件的使用寿命。
3.4.9 智元机器人:从灵巧手到整机,产品体系完备,2025年1月成功量产下线第1000台通用具身机器人
智元机器人(AgiBot)成立于2023年2月,专注于通用具身智能领域,构建完整产品链,致力于打造融合硬件本体与人工智能的全品类具身智能机器人矩阵。
公司自主研发了覆盖机器人本体、智能系统及软硬件平台的核心能力,形成了远征、灵犀、精灵三大产品系列,广泛应用于交互服务、柔性制造、数据采集等商用场景。2025年1月,随着第1000台通用具身机器人成功量产下线,智元成为国内首家实现人形机器人规模化商业交付的企业。2024年8月18 日,智元发布拥有19个自由度的视触觉灵巧手,该产品集成了高精度的MEMS触觉感知和视触觉感知技术,标志着其已构建起完整的灵巧手产品体系,进一步巩固了其在具身智能领域的研发深度与整机集成能力的领先地位。
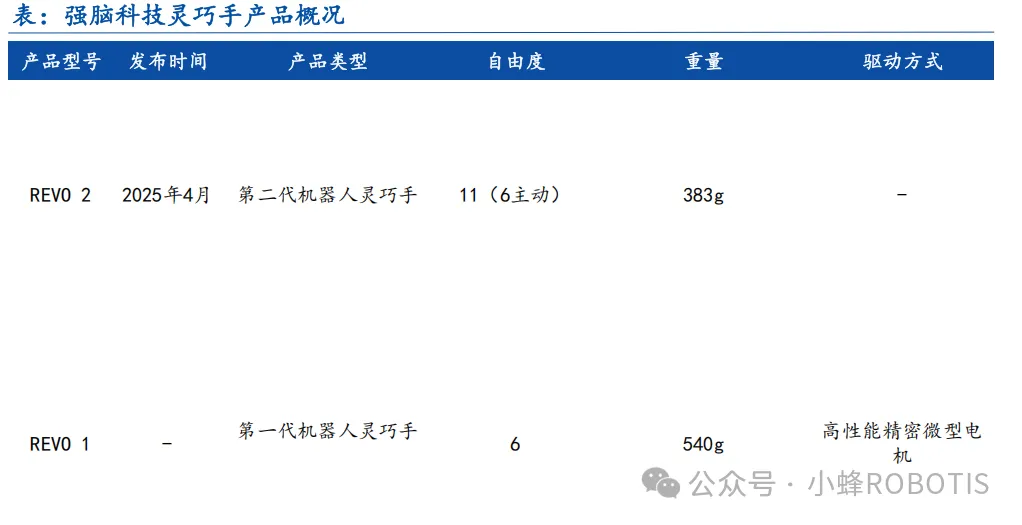
3.4.10 BrainCo强脑科技:发布全球最轻专业级灵巧手
BrainCo强脑科技创立于2015年,是首个入选哈佛大学创新实验室的中国团队,专注于非侵入式脑机接口技术,其突破性BrainCo Hand系列产品支持先进的非侵入式脑机接口技术,赋能截肢用户实现五指独立的直觉化精准控制。依托于仿生手研发经验, 目前公司新发布的Revo 2灵巧手是全球最轻量专业级灵巧手,基于假肢手与一代灵巧手的成熟技术迭代升级,延续了前代产品的稳定性和高性能优势,通过仿生关节优化、精密传动机构与整机轻量化方案,实现了极致轻量、小巧轻便但功能强大,可精准感知物体硬度、纹理及受力方向。
其通用化的协议与接口设计,可无缝应用于机器人平台,达成通用的灵巧操作能力。同时Pro版集成了EtherCAT通讯接口支持最高1kHz实时控制。 目前,强脑科技智能仿生义肢手产品已实现量产,相关技术平台也为其在服务机器人与灵巧操作领域的应用拓展奠定了基础。随着Revo 2 等灵巧手产品的发布,公司正逐步构建面向康复、人形机器人与多场景交互的产品体系。
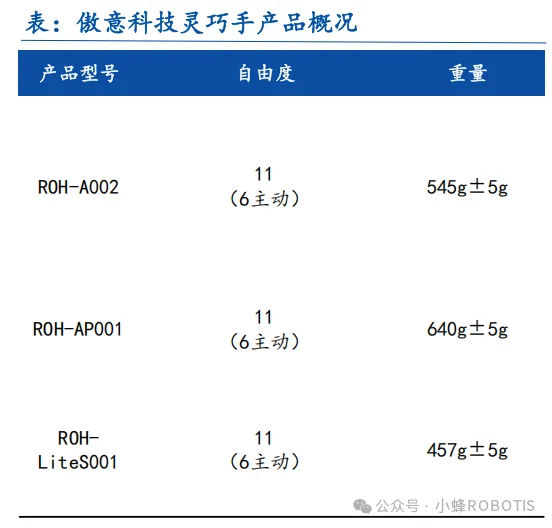
3.4.11 傲意科技:BOM成本降至万元以内,获苹果公司采购意向
上海傲意信息科技有限公司成立于2015年,专注于无创脑机接口、神经信号AI解码及机器人核心部件的研发,推出工业级ROHand灵巧手、面向截肢患者的OHand™智能仿生手、面向由于神经功能损伤导致的手部运动障碍的手指关节外骨骼等产品。广泛应用于科研、康复及人形机器人领域,并获得包括苹果在内的国际具身智能企业采购意向。
灵巧手产品在签署授权协议后可提供 ROS/ROS2 平台二次开发用 SDK,方便客户在现有系统中快速集成与功能拓展,加快应用落地进程。 配备高密度点阵触觉传感器的第二代灵巧手ROH-AP001 如同装上“ 电子神经末梢 ”,实时感知 0.1N–25N 压力并精准调力,从捏薯片到握重工具都更稳。依托医疗级仿生手的成熟供应链体系,通过共用核心部件实现成本摊薄,成功将工业灵巧手的单台 BOM 成本从早期的3万元降至万元以内,显著降低量产门槛。当前,公司已形成“低成本—高性能—稳定产能 ”的正向闭环,成为国内少数具备批量交付能力的灵巧手厂商。2025年以来,灵巧手订单量同比增长超两倍, 产能紧张,部分客户提前锁单。
3.4.12 雷赛智能: 整手最大负载达全球领先的40kg ,首代产品已在多个客户场景完成试用验证
深圳市雷赛智能控制股份有限公司是智能装备运动控制领域的全球知名品牌和行业领军企业。公司专注于伺服电机驱动、步进电机驱动、运动控制卡和运动控制PLC等产品的研发、生产与销售,其灵巧手具有高自由度、高速通讯、高可靠性、强大感知能力、强大负载能力、轻量化等核心竞争优势,可广泛应用于工业自动化、商业与家庭等各类场景。
DH116 作为公司第一款灵巧手,定位是普及型灵巧手, 自重 490 克,最大负载能力达全球领先的 40 公斤,单指负载 10 公斤, 目前已进行试产试销。继今年3月发布DH116普及型灵巧手后,雷赛已在多个客户场景完成试用验证,覆盖迎宾、娱乐、物流等大批量低成本应用。新推出的DH2015高自由度方案主打高端家用与商业场景,具备20自由度、高速通讯、高可靠性、强感知、强负载与轻量化六大优势,兼顾精度、响应与适配能力。雷赛智能子公司深圳灵巧专注高质价比的灵巧手零部件研发和生产,拥有先进设备和大规模制造能力。 目前 DH 系列灵巧手解决方案由子公司灵巧驱控负责研发、生产、销售,通过自家零部件供应,帮助客户降低成本,提高产品竞争力。
3.4.13 兆威机电:全球首创指关节内置全驱动力单元的灵巧手产品
集设计、研发、制造于一体的微型驱动系统方案解决商,兆威机电在人型机器人技术领域相关产品包括高性能电机及全驱动仿人灵巧手。
兆威机电于2024年11月发布全球首款指关节内置全驱动力单元的灵巧手,集成微型电机、减速器、传感器和控制模块,实现17个主动自由度,具备高响应速度和高控制精度。2025年7月,ZWHAND系列推出新一代灵巧手,在上一代基础上实现重要升级:采用创新的微型丝杠步进电机,在指节空间内实现线性驱动,产品型号扩展为LM06、DM17和DM20,覆盖如高负载等更多应用需求,实现了从单点突破向系统化集成解决方案的升级。兆威机电称其自主研发的微型行星减速机在性能上已达到日本电产(Nidec)同类产品水平,同时具备明显的成本优势。
打赏
更多
>
同类资讯
• 【研究报告】无人机蜂群作战在�
0
条
相关评论
推荐图文
推荐资讯
点击排行
0
1
赛力斯超级增程技术五次迭代及对相关行业的影响分析
0
2
2025中医药市场研究报告(附下载)
0
3
行业完整分析框架
0
4
李中厚调研自然资源、市场监管等工作
0
5
未来十年最具潜力的五大出海行业深度分析!
0
6
重磅解读|《关于推进行业高质量数据集建设行动的实施方案》 的风向
0
7
每天一本投资经典|《手把手教你读财报》
0
8
2025-2027年行业报告合集|30+行业分析研究报告|市场调研资料参考
0
9
PCB行业深度跟踪报告:AI高速升级需求催生mSAP新趋势,积极把握算力主升浪行情-招商证券
网站首页
|
关于我们
|
联系方式
|
使用协议
|
版权隐私
|
网站地图
|
排名推广
|
广告服务
|
积分换礼
|
网站留言
|
RSS订阅
|
违规举报
|
皖ICP备20008326号-18
(c)2008-2022 免费发布网 All Rights Reserved