▍报告来源:未明确标注
▍会员权益:每天50篇各领域最新的高质量报告
《具身智能数据行业研究白皮书(2026)》是一份聚焦于具身智能领域数据生态发展的深度研究报告。具身智能作为人工智能与物理世界交互的前沿方向,其发展高度依赖于高质量、多模态的数据。本报告系统性地梳理了具身智能数据采集、处理、应用的全链路,并借鉴自动驾驶等成熟领域的经验,为行业参与者描绘了清晰的数据发展路径与商业化前景。
具身智能的发展背景与数据挑战
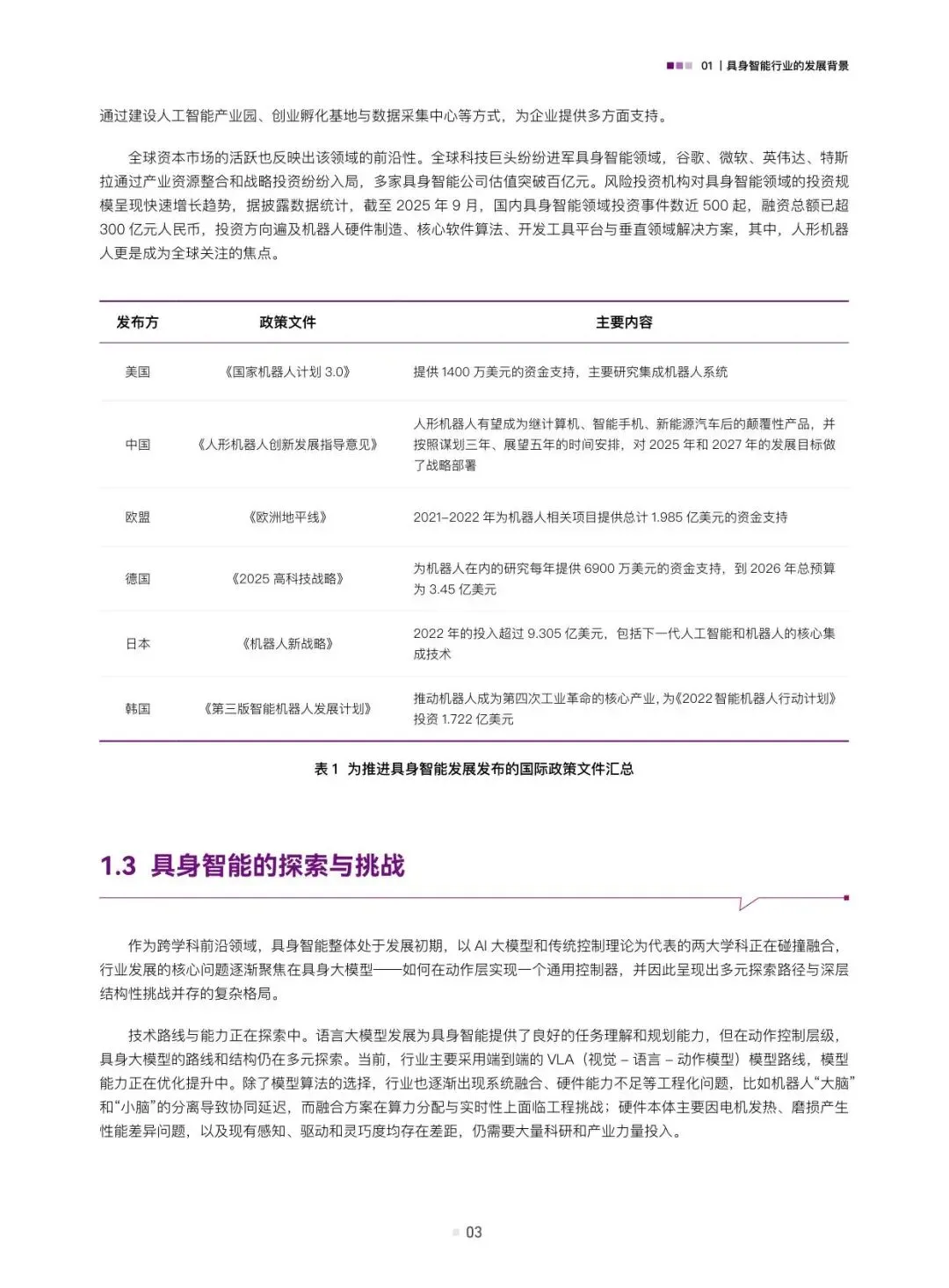
报告首先阐述了具身智能的概念内涵,指出其正成为全球科技竞争的焦点。具身智能旨在让机器像人一样通过感知和行动来理解和改造物理世界,这对其背后的数据体系提出了极高要求。当前,行业面临的核心挑战在于如何高效、低成本地获取能够支撑智能体在复杂、开放环境中进行精细操作与决策的训练数据。
多元化的数据采集技术路线
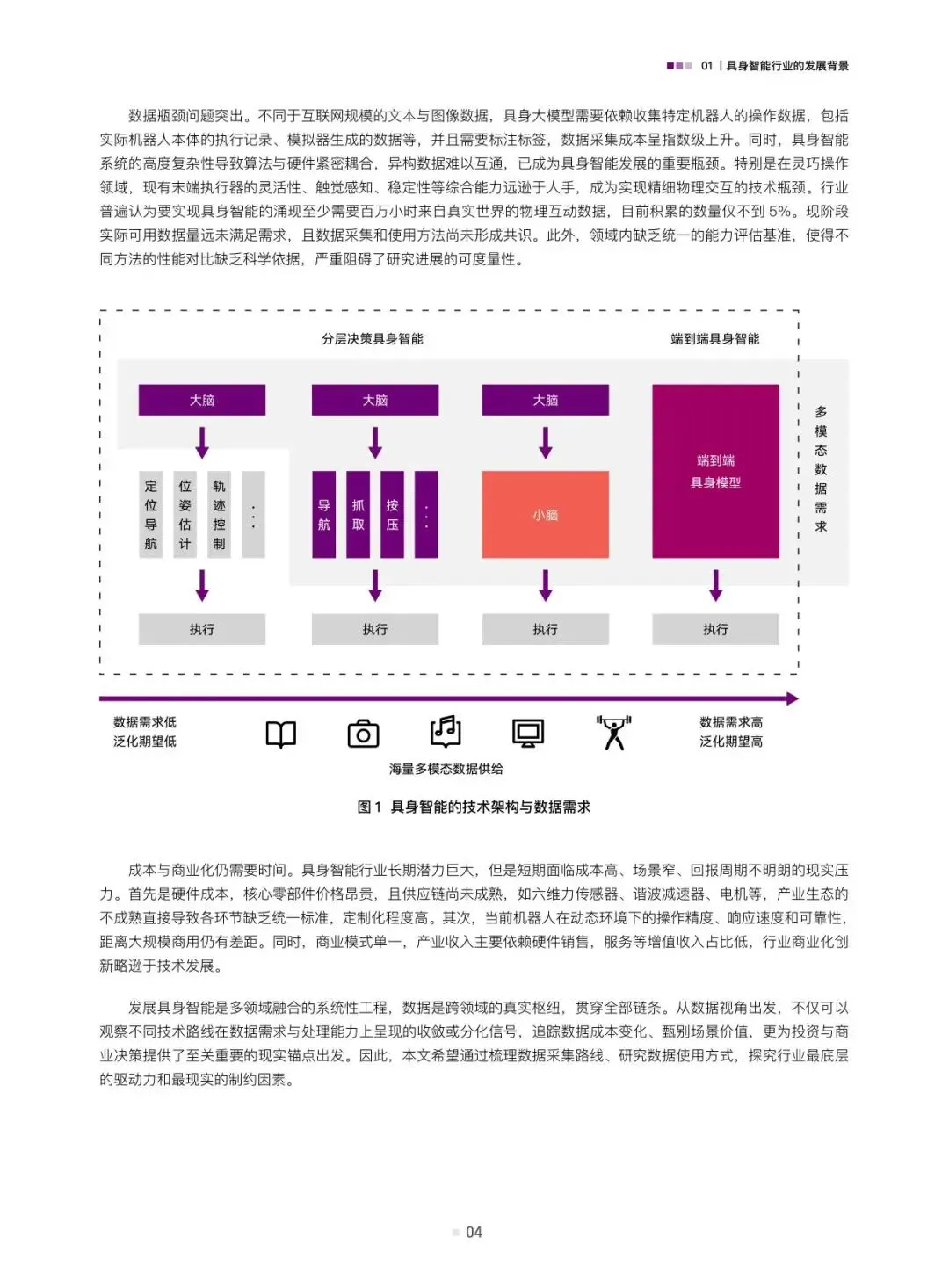
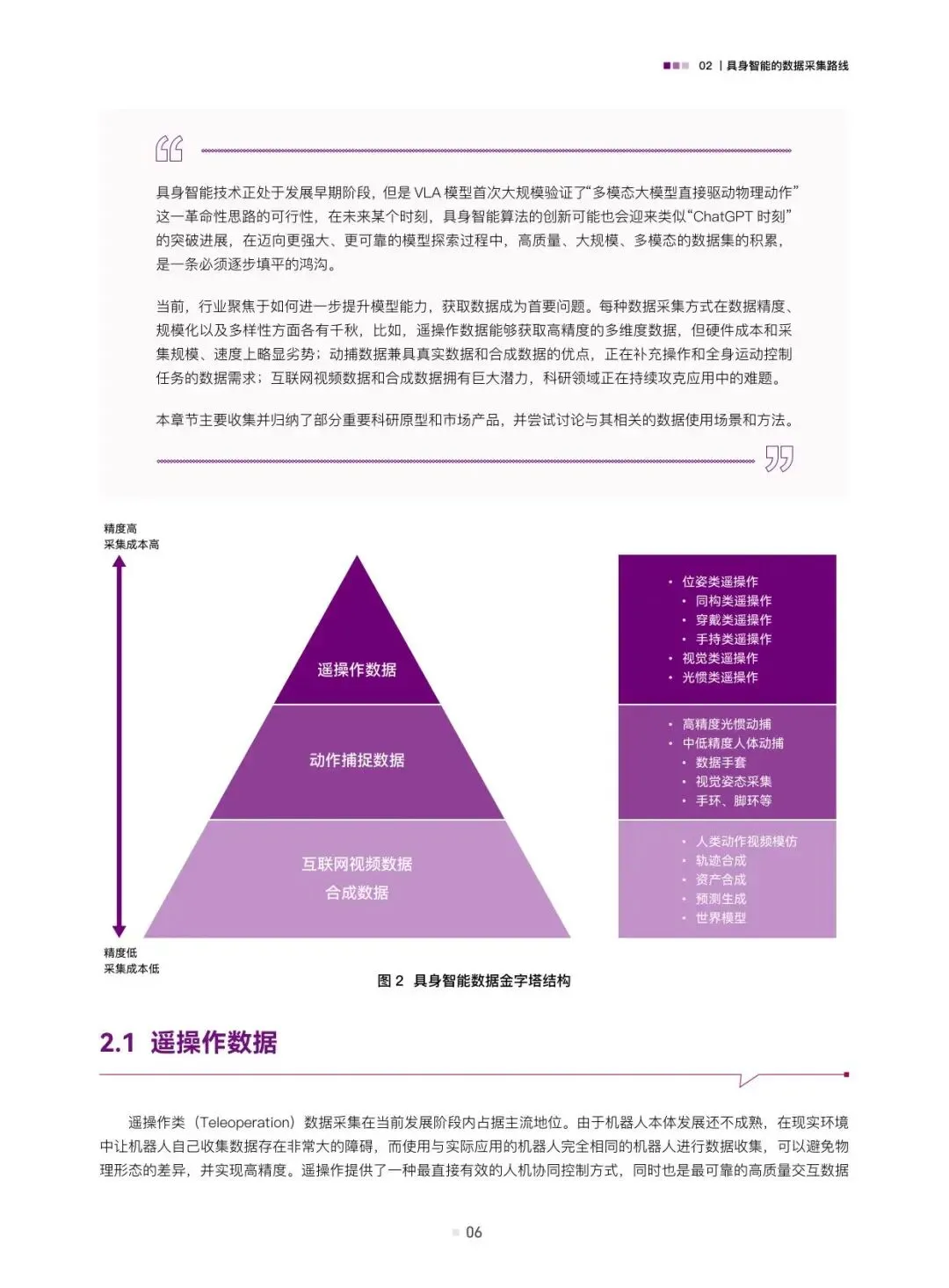
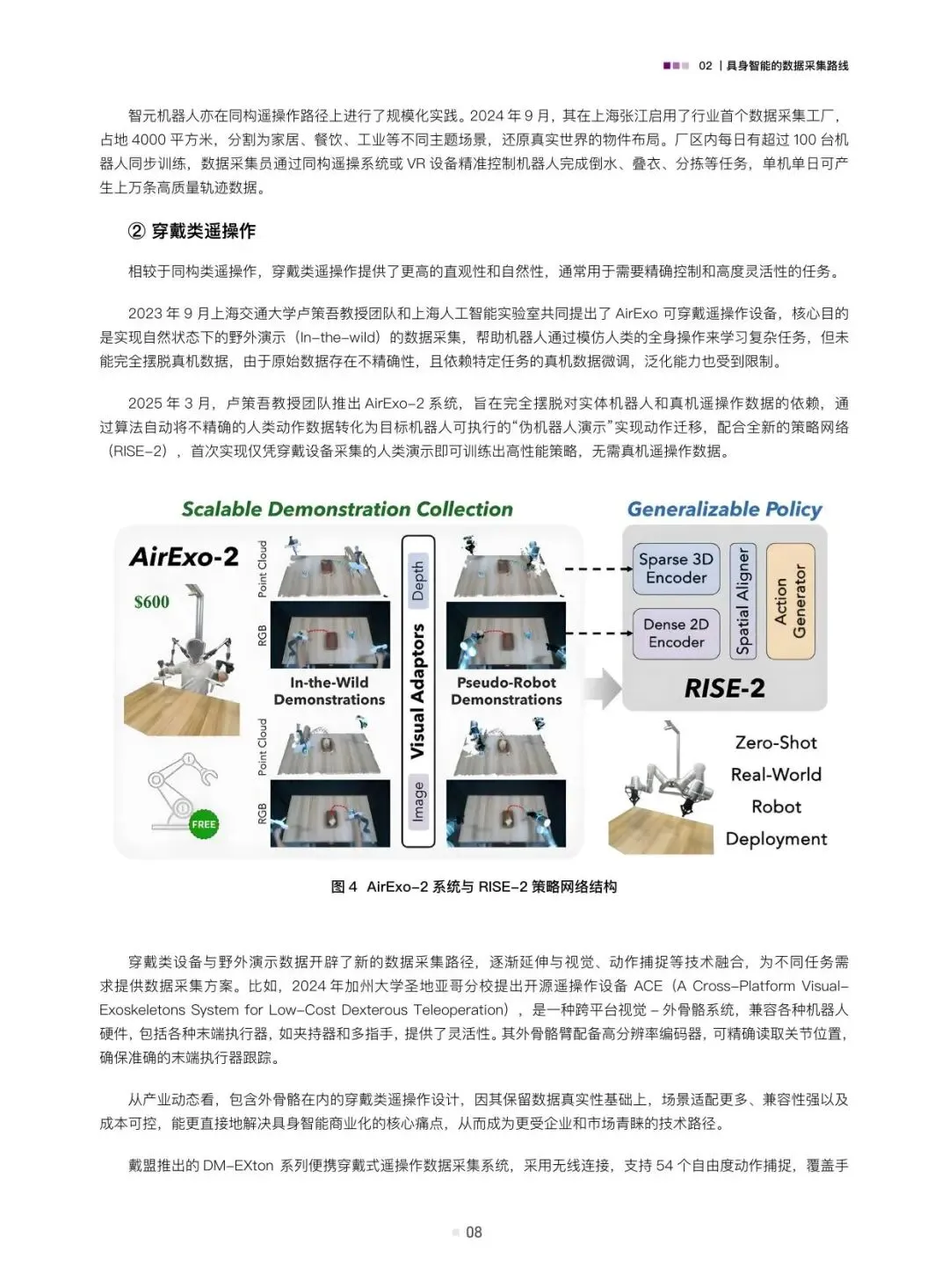
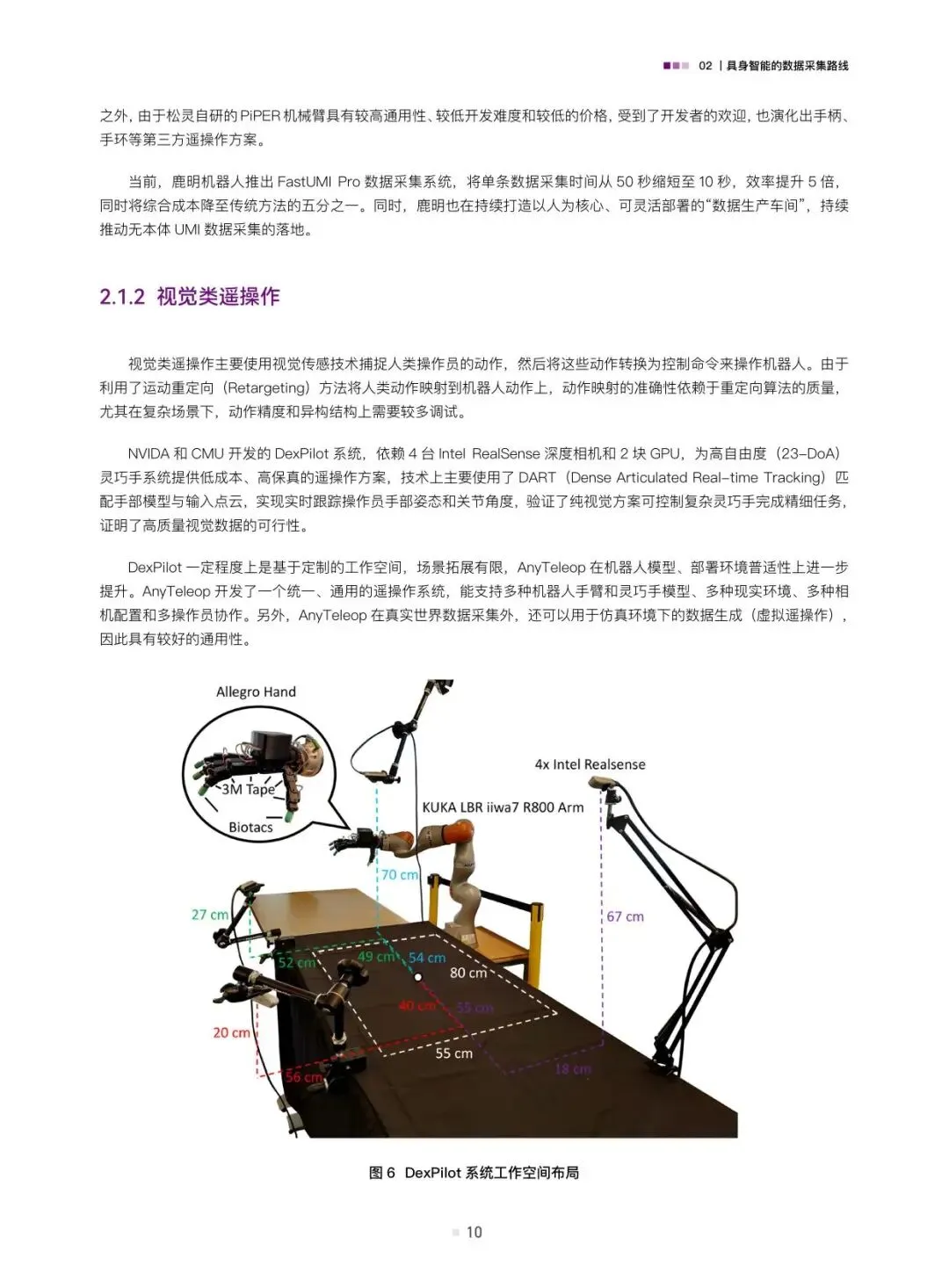
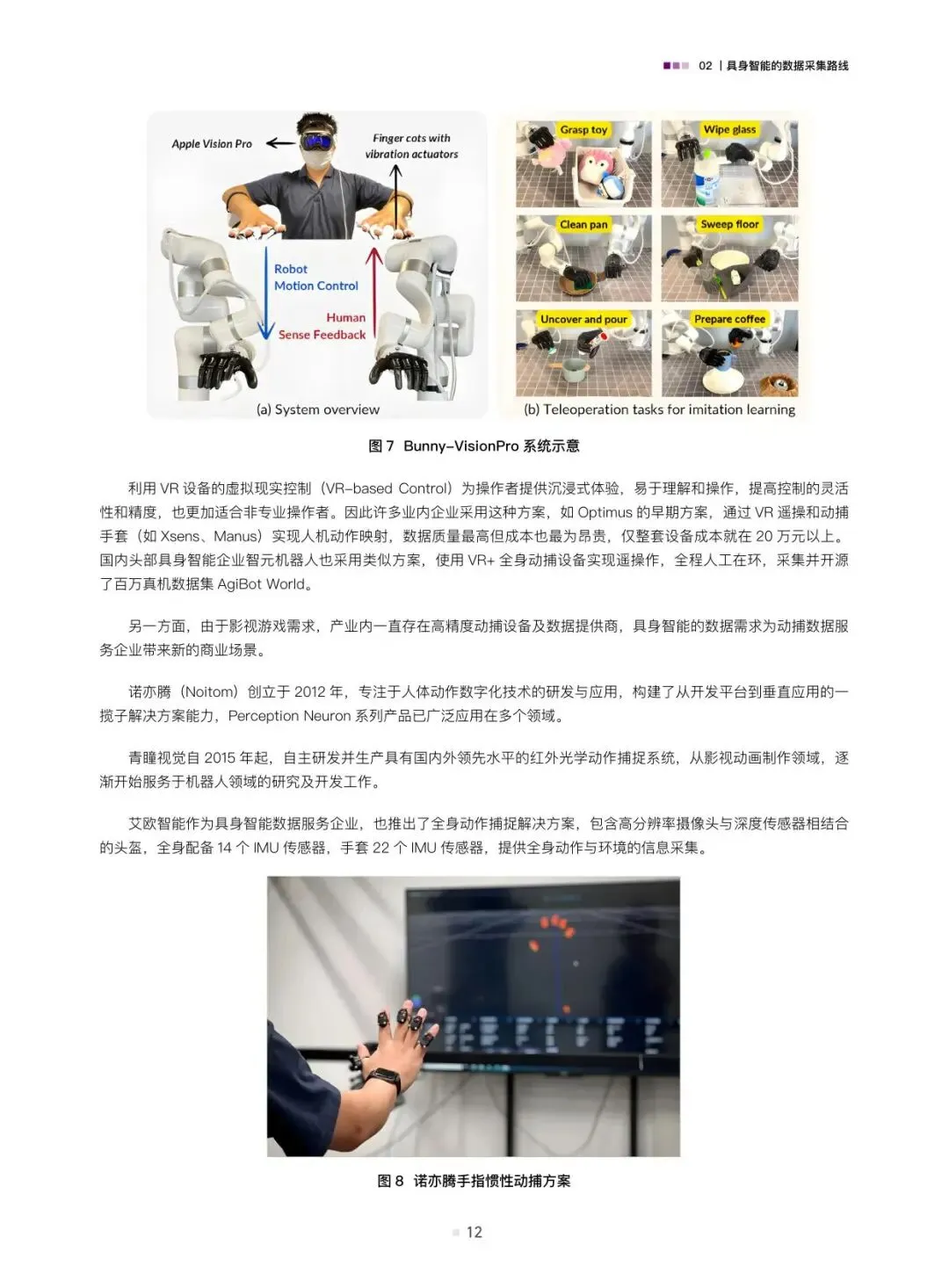
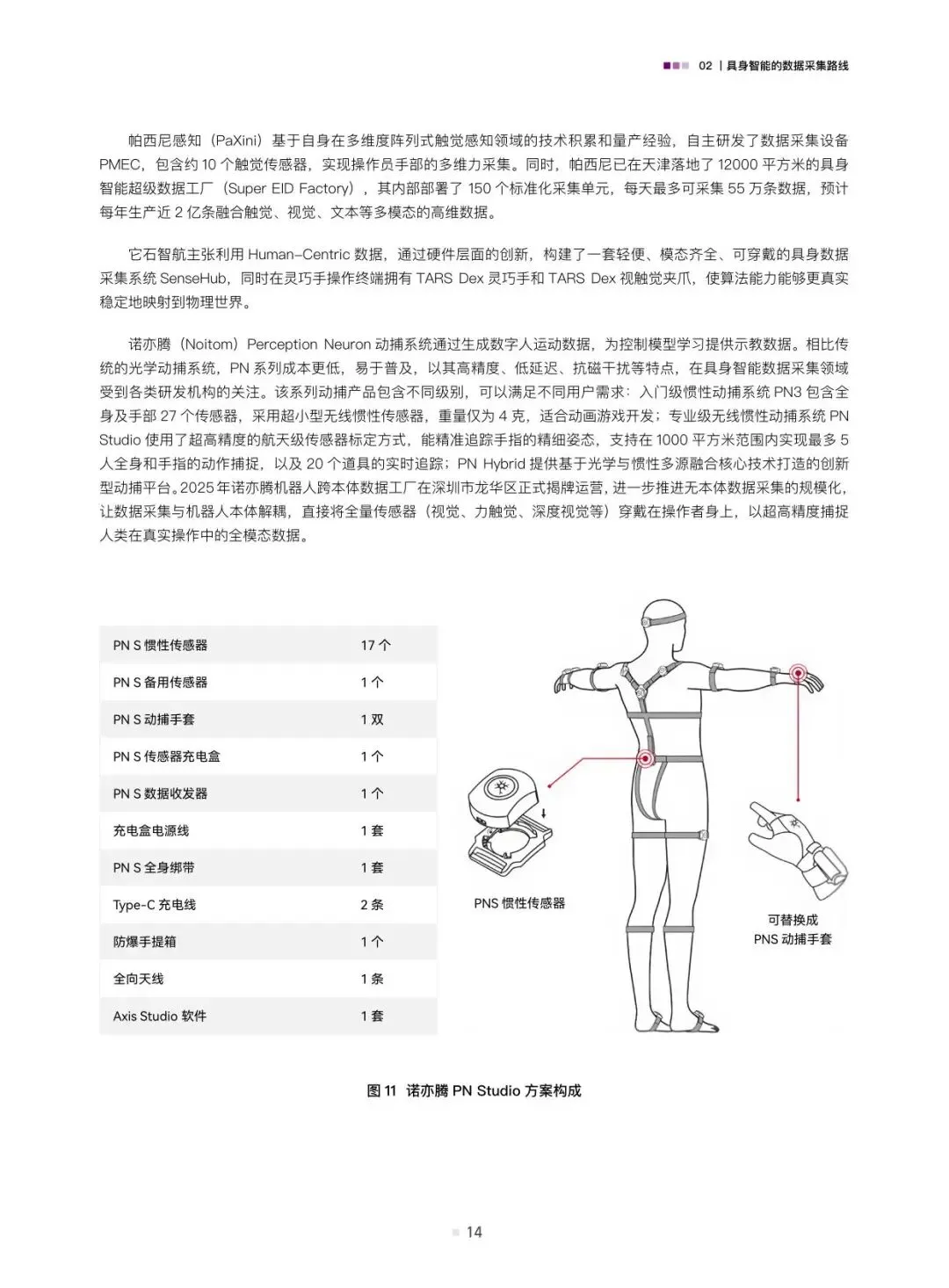
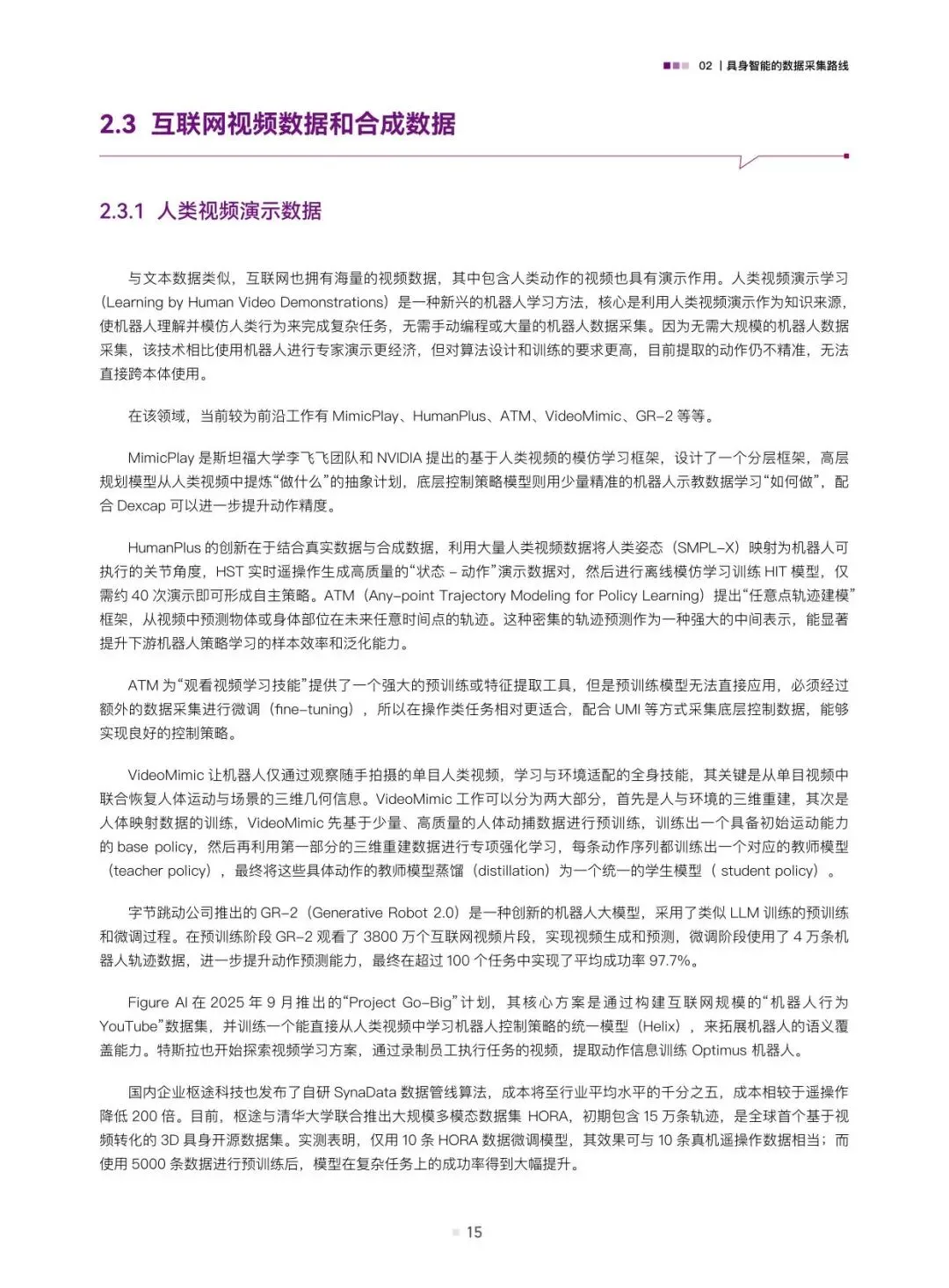
报告详细剖析了三种主流的数据采集路线。遥操作数据是当前获取高质量演示数据的关键手段,具体包括位姿类、视觉类和光惯类遥操作,它们能精确记录人类专家的操作意图与动作细节。动作捕捉数据则侧重于捕捉人体或物体的运动轨迹,为模仿学习提供基础。此外,互联网上丰富的人类视频演示数据以及通过计算机图形学生成的合成数据,正成为低成本、大规模数据来源的重要补充。报告通过案例分析,展示了这些技术在不同场景下的应用与价值。
借鉴自动驾驶的数据发展经验
报告认为,自动驾驶行业在数据采集、融合与应用方面积累了宝贵经验,对具身智能具有重要借鉴意义。例如,高精地图作为静态真实数据的代表,其发展历程揭示了数据精度与成本之间的平衡之道。数据异构融合技术通过分层采集与合成,有效应对了现实世界的复杂性。而“仿真优先,真机验证”的数据驱动闭环模式,则为安全、高效地迭代算法提供了可行框架。
具身智能数据发展的核心评估
报告对具身智能数据的发展趋势进行了评估。真机遥操作数据在不同发展阶段(如原型验证、算法迭代)提供着不可替代的核心价值。无本体数据采集(如仅通过视觉观察学习)技术有望突破数据获取瓶颈,推动模型性能提升。同时,报告也客观指出,仿真系统是一套强大但非完美的必要工具,它在提供海量、可控训练场景的同时,也面临着与真实世界存在“鸿沟”的挑战。
数据视角下的渐进式商业化道路
从商业化角度看,报告提出了一条基于数据积累的渐进式发展路径。初期,可利用少量高质量数据构建原型,验证在特定工程环境下的基本执行能力。随后,应聚焦于具体垂直场景,通过大量场景化数据驱动算法持续迭代与功能标准化。最终目标是利用海量、多样化的数据,实现智能体高阶认知与决策功能的闭环拓展,从而解锁更广阔的应用空间。
行业机会与潜在风险总结
报告最后总结了具身智能数据领域的发展机会与风险。机会方面,感知技术的创新为多模态数据采集打开了新入口;数据采集与治理是行业标准化的底层基建;垂直场景解决方案能加速模型落地;真机失败数据是宝贵的优化资源;世界模型被视为通向通用能力的关键路径。然而,行业也面临技术路径快速迭代与收敛的不确定性、数据可用性验证的高投入风险、数据安全与伦理监管挑战、产品安全保障缺失以及行业生态与标准尚未成熟等多重风险。报告强调,数据技术路线之争远未终结,能否实现“完全无本体”学习仍是开放命题,需要业界持续探索与耐心。