


• 位置传感器的转型 • 技术基础:工作原理 - 霍尔 vs. TMR • 霍尔和TMR传感器中的杂散场补偿 • 基于应用场景的技术建议 • 结论与行动建议
作者
Frederik Berstecher,TDK-Micronas 快速霍尔传感器产品线经理Marcus Meyer,TDK株式会社日本公司 项目工程主管
TDK-Micronas 和 Rutronik 如何共同塑造位置测量的未来
现代位置传感器的需求正在迅速增长,尤其是在安全关键的汽车应用中,例如线控制动、电子驻车制动和转向系统。随着向电动汽车的转变和系统集成度的提高,精度、安装空间、EMC稳定性和材料可用性变得越来越重要。
本白皮书《采用霍尔和TMR技术的非接触式、高精度位置传感》深入比较了霍尔和TMR技术,并为选择正确的传感器架构提供了实用指导。毕竟,选择正确的技术高度依赖于具体应用。无论是坚固耐用的霍尔传感器、高精度的TMR变体,还是具有最大冗余度的混合架构:通过本白皮书,您将了解如何最佳地结合安全性和性能目标。
具有区域优势和欧洲视野的合作伙伴关系
TDK-Micronas 和 Rutronik,两家公司总部均位于巴登-符腾堡州,并深深植根于欧洲电子市场,正在结合他们的专业知识,在整条供应链上为客户提供支持。这种长期的合作伙伴关系基于创新能力、与汽车行业的紧密联系以及对开发前瞻性移动出行应用要求的深刻理解。
TDK 是霍尔和 TMR 基位置传感器的领先供应商,不仅贡献技术专长,还提供广泛的参考设计和设计支持组合。对于 Rutronik 而言,此次合作是为客户提供强大、可扩展且面向未来的“欧洲制造”传感器的战略基石。在日益严峻的地缘政治环境中,该合作伙伴关系特别增强了全球供应链中的韧性和行动能力。
Manuel GaußRutronik 模拟与传感器高级产品营销经理
Jeannette RaquetRutronik TDK-Micronas 产品线负责人
基于霍尔效应或TMR的位置传感器在汽车行业中得到广泛应用,但这两种技术究竟有何区别?何时将它们结合使用是值得的?
对于安全关键型应用,如线控制动、电子驻车制动和转向系统,对高精度和鲁棒性强的位置传感器的需求正在迅速增长。特别是在电动汽车领域和日益增长的系统集成中,对精度、安装空间、安全性和材料可用性提出了很高的要求。基于霍尔和TMR的传感器在灵敏度、抗干扰性和系统成本方面提供不同的优势。本白皮书比较了这两种技术,并展示了如何将它们结合起来,以同等地满足安全性和性能目标。
位置传感器的转型
车辆系统的日益电气化——例如,执行器、线控制动或EPS——需要高分辨率和功能安全的传感器解决方案。除了高角度分辨率和低延迟外,还必须确保在恶劣环境条件下(如温度应力和电磁干扰(EMC))的可靠运行。此外,对功能安全(如ASIL-D)、诊断能力、系统冗余和能效的要求也在不断提高。
集成也变得越来越重要:紧凑的组件和无PCB设计需要灵活的安装概念。同时,磁铁的选择变得更加重要,因为铁氧体磁铁越来越被视为稀土元素的经济可行替代品。
TDK开发并制造基于霍尔和TMR技术的解决方案,以满足这些要求。为了更好地理解这些解决方案的潜力,有必要研究一下这两种方法的物理原理和差异。
技术基础:工作原理 - 霍尔 vs. TMR
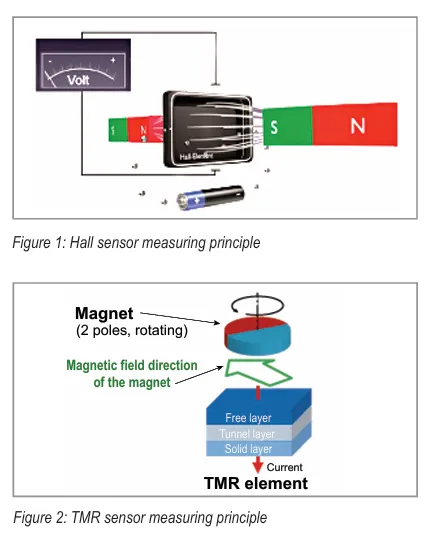
霍尔传感器基于经典的物理原理,即当磁场垂直作用于载流半导体中的电流方向时,会在电流方向两端产生电压。TDK-Micronas(TDK集团旗下公司)使用的垂直霍尔板能够在芯片级别检测磁场。与传统的“水平”设计相比,这在几何形状、抗杂散场能力和信号质量方面提供了优势。通过巧妙布置多个霍尔元件,可以精确地映射线性和旋转运动——甚至是在三维空间中(多维霍尔传感器)。
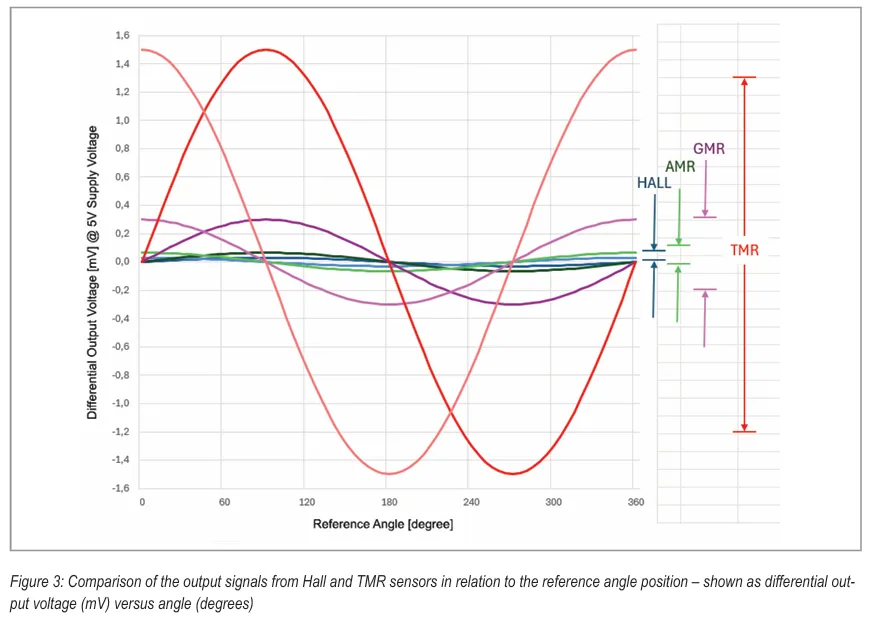
TMR(隧道磁阻)传感器利用电子穿过两个铁磁层之间的薄绝缘层的量子力学隧穿效应。这种结构的电阻变化取决于两层磁化方向彼此之间的角度。TDK使用精密制造的薄膜堆叠来实现最大的灵敏度和精度。这项技术非常适合进行高分辨率、低噪声的角度测量,无需外部信号放大。
两种技术各有优缺点。霍尔传感器以其高鲁棒性、成熟的CMOS兼容制造技术、低成本和易于集成到对精度要求不那么关键的应用中而著称。三维可测性配合相应的信号处理也开辟了灵活的应用可能性。
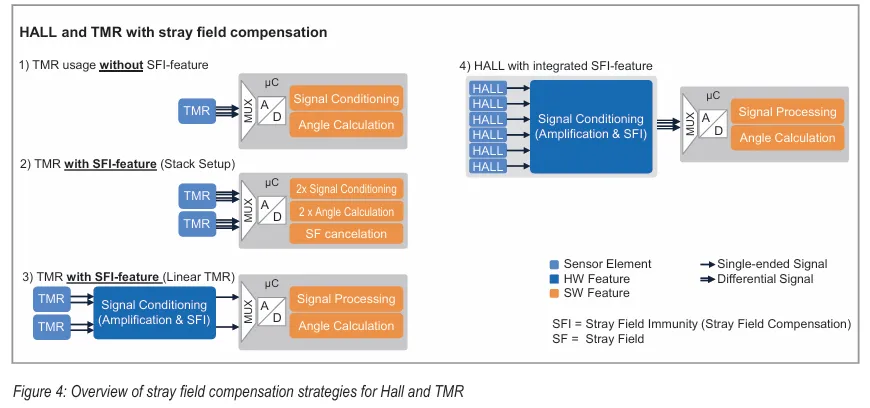
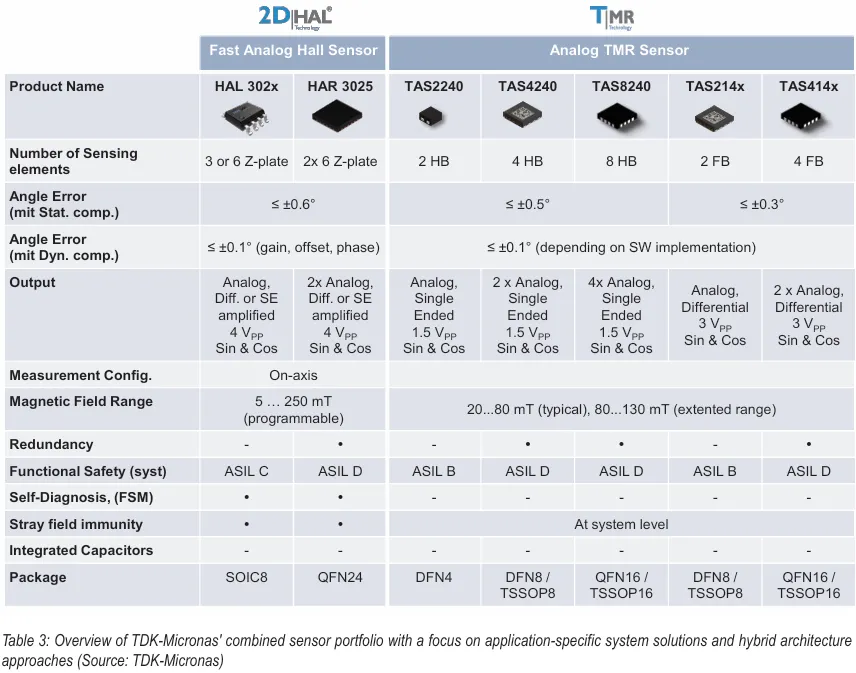
TMR传感器提供显著更高的灵敏度和精度,特别是在需要高角度分辨率(例如 )的应用中(见图3)。由于其高信号强度,无需前置放大,使其成为动态或安全关键型应用的理想选择。低温度漂移是TMR传感器的另一个优势。表1概述了各自技术的优势以及可比较的特性。
两种技术的应用重点都在于转向系统、电机和执行器以及制动系统。
霍尔和TMR传感器的杂散场补偿
现代制动系统必须在电磁应力下提供可靠的位置数据。传感器补偿外部磁场的能力直接影响信号质量和系统稳定性。
霍尔和TMR传感器在干扰杂散场补偿方面采取了根本不同的方法:TMR解决方案依赖于基于架构或特定应用的概念,而霍尔传感器在芯片级别抑制杂散场。
尽管TMR传感器天生具有非常高的信噪比,但它们不具备芯片级别的主动补偿功能。在强杂散场影响的情况下,它们因此需要通过合适的系统架构采用额外的补偿策略(见图4)。
堆叠设计的TMR传感器凭借其差分信号处理提供了一种有效的杂散场补偿解决方案。两个传感器以相反方向垂直排列在电路板上。主传感器靠近磁铁,而从传感器位于相对侧。虽然与测量相关的磁场分量因距离不同而变化,但外部杂散场对两个传感器的影响几乎相同。这些干扰影响通过基于软件的两个传感器信号的差分被大大消除。确定的角度值之间的差值直接作为校正量的度量,以补偿杂散场效应。软件还处理信号处理,包括偏移和增益校正、正交性调整和角度计算,以及诸如谐波补偿之类的可选功能。与安全相关的功能(FuSa)也在系统中实现。这种设计不需要复杂的硬件,并实现了无需外部屏蔽的鲁棒、抗干扰的角度测量。
线性TMR传感器对通过差分信号处理实现固有的杂散场抑制。通常,两个TMR单元沿着磁场路径在径向离轴配置中横向偏移放置。传感器桥接被设计为反向的,使得均匀的外部杂散场在两个信号中大部分相互抵消。尽管两个传感器检测到相同的杂散场,但它们感测到的磁场分量由于它们相对于磁铁的位置而彼此不同。减去信号可在信号电平上抑制效应,并提供代表纯感测磁场分量的稳定差分信号。软件对两个通道执行独立的信号处理——包括偏移和增益校正、正交性补偿和角度计算。这种方法特别适用于具有动态磁场梯度和高EMC暴露的应用,以最小的硬件要求提供高精度。
具有差分评估功能的线性TMR传感器为杂散场补偿提供了一种鲁棒的解决方案,可以在硬件端和通过基于模型的软件实现。为此,两个对XY轴敏感的TMR单元被布置成使得它们既能检测与测量相关的磁场,也能检测相似的均匀外部杂散场。差分放大器减去两个传感器的信号(Ux1-Ux2,Uy1-Uy2),有效地滤除与场相关的偏移。软件负责进一步信号处理,例如偏移、增益和正交性校正以及角度计算。如果需要,可以实现附加功能,如谐波补偿和功能安全监控(FuSa),但不是强制性的。对于因安装位置或温度效应等原因导致的应用相关不对称性,也可以在控制单元中执行基于模型的场补偿。它使用预先校准的系统模型来校正任何剩余的偏差。这种方法非常灵活,但需要在组件或车辆层面进行验证。结果是以最小硬件要求获得高精度、抗干扰的传感器信号。
HAL 302x系列中的霍尔传感器在芯片级别直接具备集成的杂散场补偿功能。这基于一个六边形的6ZD单元结构,包含六个对称排列的霍尔元件,其信号在内部进行差分评估。这使得均匀的外部磁场——例如由直流或交流杂散场引起的磁场——能够在传感器内部通过数学方式被抑制。信号处理完全在芯片内进行。使用正弦/余弦变换将目标场与杂散磁场分开。增益、偏移、正交性和零位索引都是可编程的。这产生了一个高度精确、干扰补偿的输出信号,在组件级别就已满足ISO 11452-8的要求——无需任何外部屏蔽或校准。即使在不利条件下,如小气隙或不对称的磁性排列,信号也能保持稳定。
对于4000 A/m的干扰场,典型的残余误差小于 。此外,集成了FuSa(功能安全)功能,提供扩展的诊断覆盖范围,并简化了控制单元级别的外部安全监控。除了角度计算,软件还执行可选的动态误差补偿以实现最大测量精度。
铁氧体磁铁是钕铁硼磁铁的一种经济且易于获取的替代品。霍尔和TMR传感器都可以针对与铁氧体磁铁配合使用进行优化。它们的优势包括不依赖稀土、高温度稳定性和成本确定性。
较低的磁场强度可以通过系统校准或信号放大来补偿。
基于应用场景的技术建议
为汽车应用中的位置测量选择合适的传感器技术需要仔细评估技术和规范要求,例如精度、EMC鲁棒性、安装空间、安全要求和系统成本。
霍尔传感器特别适用于中等角度分辨率、EMC关键环境或安装空间受限的应用。
HAL 302x系列提供集成的杂散场补偿,并根据通用汽车标准获得认证——非常适合具有可靠基本安全和冗余设计的紧凑、鲁棒的设计。
TMR传感器,如TAS系列,可实现最大的角度分辨率()、宽带宽和动态、节能的信号处理。它们是对功能安全、诊断能力和响应速度有最高要求的应用的首选——例如在线控制动或转向系统中。正弦/余弦输出,结合极低的功耗,实现了精确控制,同时符合ISO 26262的安全标准。
安全关键型应用尤其受益于两种技术的结合使用。双堆叠架构能够实现相互监控,提高EMC鲁棒性,并增强诊断能力——同时最大限度地减少额外成本和复杂性。这使得冗余、功能安全和精确的角度检测能够有效结合——这是现代控制和安全应用的决定性优势。
对于高效的系统设计,建议尽早规划具有冗余和诊断能力的传感器架构。在成本和空间关键的应用中,霍尔传感器仍然是首选。然而,对于有最高要求的安全相关应用,有针对性地或结合使用霍尔和TMR技术是实现强大、符合标准和具有竞争力的解决方案的关键。
| 技术类型 | |||||||
| 感应元件数量 | |||||||
| 角度误差(含静态补偿) | |||||||
| 角度误差(含动态补偿) | |||||||
| 输出 | |||||||
| 测量配置 | |||||||
| 磁场范围 | |||||||
| 冗余 | |||||||
| 功能安全(系统) | |||||||
| 自诊断 (FSM) | |||||||
| 抗杂散场能力 | 内置 | 内置 | 系统级别 | 系统级别 | 系统级别 | 系统级别 | 系统级别 |
| 集成电容器 | |||||||
| 封装 |
结论与行动建议
霍尔或TMR技术的选择必须结合具体背景和预期应用来考虑。以下原则适用:
霍尔传感器适用于对精度要求中等至高、结构紧凑且要求坚固耐用的系统。TMR传感器是高精度、动态和安全关键型应用的首选。混合架构在精度、冗余和EMC稳定性方面提供了最佳平衡。
选择建议
1. 定义应用需求(精度、EMC、安全等级、安装空间、成本)。 2. 使用表格评估合适的传感器系列。 3. 如果需要冗余和/或最高精度,考虑混合解决方案。 4. 使用可用的参考设计和评估板进行系统验证。 5. 咨询TDK-Micronas以获得定制的设计支持。